Ensemble Learning(앙상블 학습)
- 앙상블 학습은 여러 개의 모델을 학습시켜, 다양한 예측 결과들(평균, majority vote)를 이용하는 방법론
- 모든 머신 러닝 모델과 회귀, 분류 문제 모두에 적용 가능함
- 보통 결정 트리에서 자주 사용됨
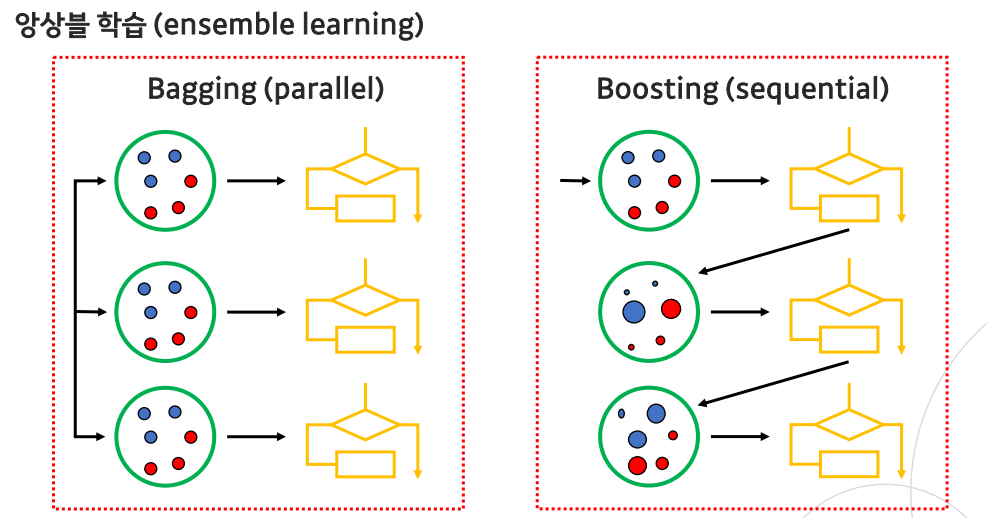
- 크게 Bagging과 Boosting 두 가지 방법론이 존재
부트스트랩(bootstrap)
- 모수(모평균, 모분산, 모비율, 모표준편차)의 분포를 정확히 추정하기 위해선 더 많은 표본 데이터셋이 필요함
- 하지만 표본을 계속 얻는 것은 현실적으로 어려움
- 현재 가지고 있는 샘플을 복원 추출(sampling with replacement)하여 여러 개(B개)의 데이터셋을 만듦
- : 평균
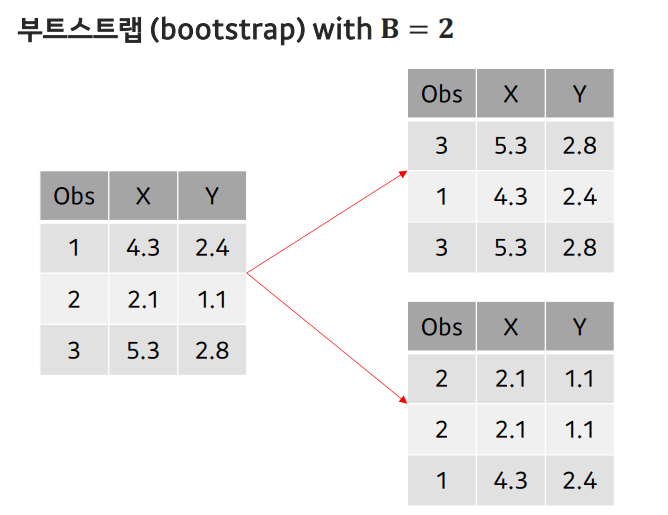
- 집합 내에서 중복되도 상관 없이 표본을 추출하는 복원 추출
부트스트랩 (bootstrap) with n obs
- j-th 샘플이 첫번째 bootstrap observation으로 뽑히지 않을 확률 : ()
- j-th 샘플이 두번째 bootstrap observation으로 뽑히지 않을 확률 : ()
- 전체 bootstrap 샘플에 j-th 샘플이 포함되지 않을 확률:
- 데이터 개수 N이 충분히 많을 때 :
- B개의 bootstrap 데이터셋을 생성했을 때, j-th 샘플이 없는 데이터셋의 비율:
Motivation of Bagging
- 각각 분산을 가진 n개의 독립적인 observation(
- 관측의 평균 에 대한 분산은
- 여러 관측을 평균내면 분산을 줄여줌 --> 사용 이유
- 하지만 다수의 학습 데이터셋을 얻는 것은 현실적으로 어려움 --> 부트스트랩 사용
Bagging
- Bootstrap을 이용해, 한개의 학습 데이터셋으로부터 B개의 데이터셋을 추출
- 각가의 데이터셋으로 모델을 학습함
- 모든 예측치를 평균(회귀)내거나, majority vote(분류)를 취해 분산 오류를 낮춤
- 회귀 :
- 분류 :
- Bagging, 또는 Bootstrap aggregation이라 부르며, 보통 결정 트리(성능속도 해석력)에서 많이 사용
- 배깅을 사용하면,
- 결정 트리의 성능면에서의 단점을 보완 가능
- 학습 결과에 대한 해석력이 떨어짐.
- 특히, 어떤 피처(variable)가 가장 중요한지 판단이 힘듦
- B개의 결정 트리에서 각 variable에 따른 split으로 RSS(회귀) 혹은 Gini index(분류)의 감소량을 평균내 순위를 매김
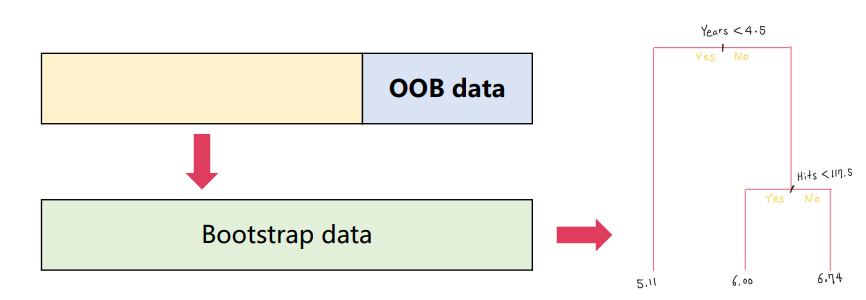
OOB(Out-of-Bag Error Estimation)
- Bagged model을 사용하면 test error를 쉽게 추정할 수 있음
- 배깅은 bootstrap을 사용하기 때문에, 대략 2/3 샘플만으로 하나의 결정 트리를 학습
- 하나의 Bagged tree를 학습할 때 사용되지 않은 샘플들을 out-of-bag(OOB)로 부름
- OOB prediction : i-th 샘플이 포함되지 않은 bootstrap 데이터셋으로 학습된, 대략 B/3 개 tree들의 i-th 샘플에 대한 평균(회귀) 혹은 majority vote(분류)
- OOB error : 각 샘플들의 OOB prediction으로 얻은 오류
- OOB error는 test error에 대한 유효한 추정값이 됨
- B가 충분히 많을 때, OOB error는 LOOCV(교차검증)와 거의 동일함 --> OOB를 활용하여 교차검증
Random forests(랜덤 포레스트)
- Bagged tree 사이의 상관관계를 없애 성능을 향상시킨 알고리즘
- 원래는 p개의 variable을 모두 고려해 split을 결정해 결정 트리를 학습함
- 만약 강력한 variable이 있으면, B개의 모든 트리가 top split으로 이를 사용할 것임 --> 상관관계 커짐
- 상관관계가 커지면(=high Cov(), 분산 오류가 크게 줄어들지 못함
- P개의 variable 중 m 개를 랜덤하게 선택해 결정 트리를 학습함
- 상관관계가 줄어든 결정트리를 사용하기 때문에, 분산 감소 효과가 증폭됨
- 일반적으로 m = 값을 사용할 때, 효과가 제일 좋음
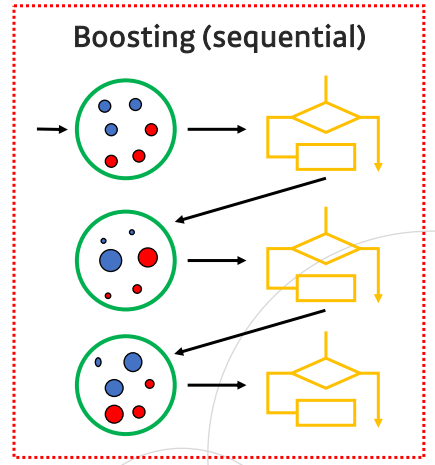
Boosting
- 배깅과 마찬가지로, 다양한 알고리즘과 회귀와 분류 문제에 모두 적용 가능
- 결정 트리를 사용한 부스팅 알고리즘
- AdaBoost
- Gradient Boosting(GBM)
- XGBoost
- Light GBM
- 배깅은 병렬적으로 생성된 결정 트리를 앙상블하는 방법
- 부스팅은 이전 스텝의 트리 정보를 활용해 순차적으로 (sequentially)트리를 만듦
하이퍼 파라미터
- Number of trees B :
- 결정 트리를 순차적으로 생성할 때, 몇 개까지 생성할지 결정 --> 가중치가 쌓임
- B값이 커질수록, over-fitting 문제가 발생함
- Number of split :
- 각각의 결정 트리가 어느 정도의 depth를 가지는지 결정
- Split이 한 번인(=2 terminal node) 결정 트리를 특별히 stump로 부름
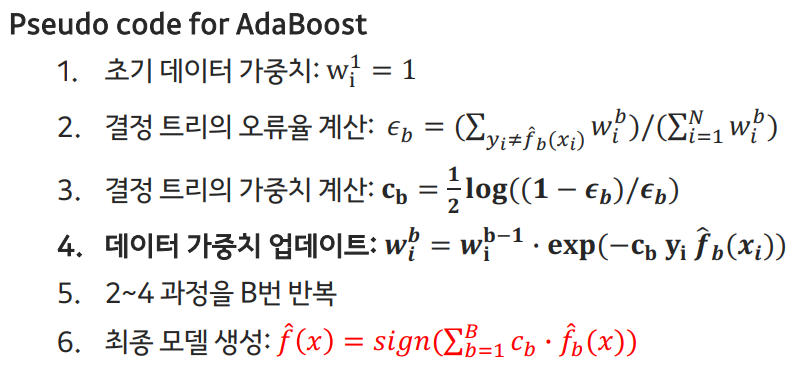
AdaBoost
-
최초의 부스팅 알고리즘
-
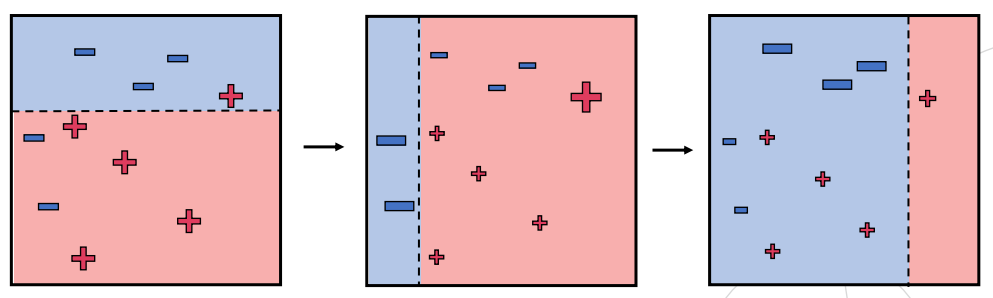
이전 결정 트리가 잘못 예측한 데이터에 큰 가중치()를 부여해, 다음 결정 트리가 더 집중할 수 있도록 순차적으로 학습
-
결정 트리로는 stump 구조 사용
-
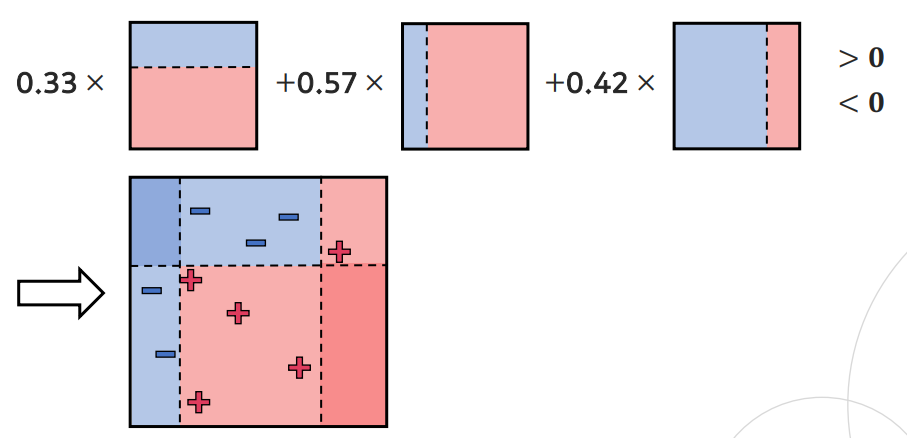
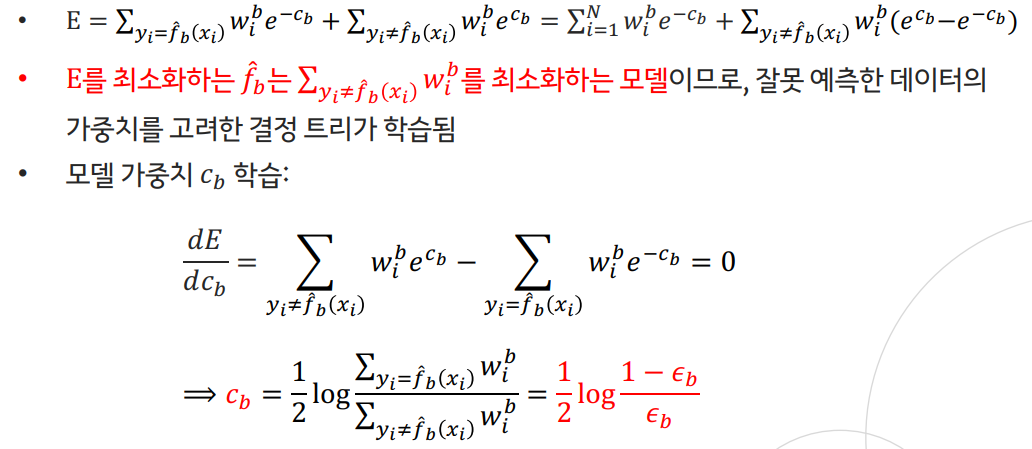
B개의 결정 트리별로 계산된 모델 가중치()를 합산해 최종 모델 생성
-
b 번째 반복에서의 모델은 다음처럼 결정 트리의 선형 결합
-
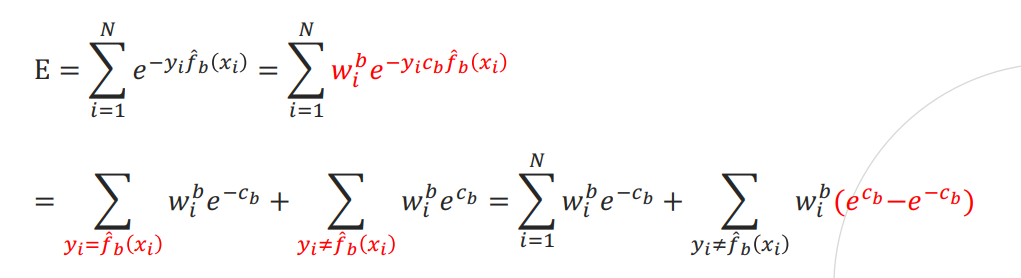
손실함수는 지수 손실의 합으로 정의(가정)

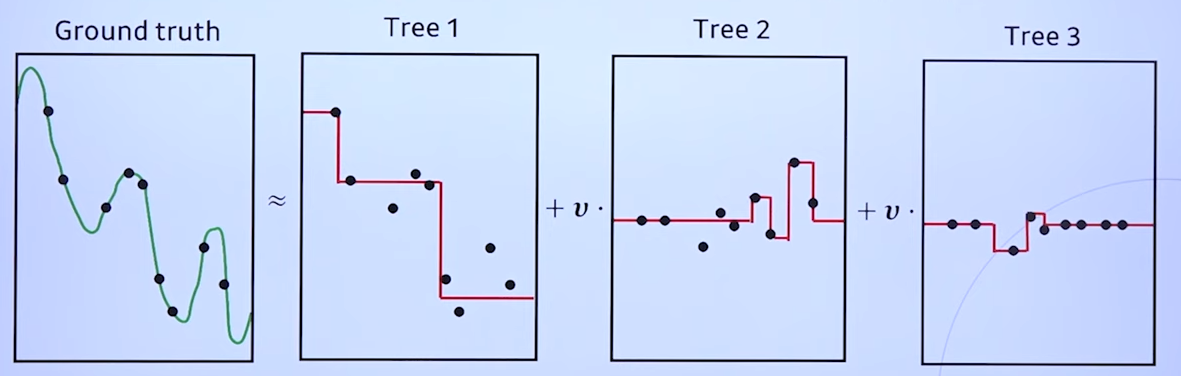
Gradient Boosting(GBM)
- 현재 모델의 오차(residual)를 줄이는 방향으로 결정트리를 학습하는 방법론
- 전체 샘플을 활용하되 가중치가 고려된 전체 데이터셋을 활용하여 학습 --> AdaBoost
- 오차가 생긴 샘플들에 한해서 학습을 하는 것 --> GBM
- 첫 번째 결정 트리는 하나의 leaf node 구조(=전체 데이터의 평균으로 예측)
- 이후에는 일반적으로 stump 보다는 더 복합한 트리 구조를 사용
- 손실 함수로는 보통 미분 가능한 MSE Loss, L1 loss, 혹은 Logistic loss사용
- Residual은 실제값과 예측값의 차이()로, negative gradient와 같은 의미
- 정의한 손실 함수에 대한 negative gradient로 residual 계산
--> 손실함수를 다양하게 사용할 수 있고, -gradient로 residual 계산 - 이전 모델의 residual을 최소화하는 결정 트리 학습(j는 terminal node 인덱스)
- 학습한 결정 트리를 그대로 합치면 over-fitting 문제가 발생할 수 있음
- 따라서, 학습률 하이퍼파라미터 를 도입함 --> Adaboost의 와 비슷
- 경사 하강법 알고리즘과 동일
XGBoost
- GBM 알고리즘의 성능과 속도 면에서 향상된 알고리즘
- 기존의 GBM은 학습 데이터에 대한 residual을 계속 줄여 over-fitting 되기 쉬움
- 정규화 항을 손실 함수에 추가함()
- (T: terminal node의 수, c: 각 노드의 가중치)
- Split finding 알고리즘을 통해 연산의 효율성을 높임
- 기존에는 모든 피처를 split 기준으로 탐색했었음
- 이에 대한 근사 알고리즘을 제안해 속도를 향상시킴
Light GBM
- 기존의 boosting 알고리즘은 B번의 반복 학습 때마다 전체 데이터셋을 살펴봄
- 이 과정에서 대부분의 계산 비용이 발생함
- 결정 트리 학습에 사용되는 데이터 수를 다음의 방법들로 줄임
- GOSS(Gradient-based One-Side Sampling):
작은 gradient 값을 가진 샘플들을 제외하는 방법론 - EFB(Exclusive Feature Bundling):
상호 배타적(mutually exclusive)피처를 묶어, 탐색해야되는 피처 수를 감소시킴
- GOSS(Gradient-based One-Side Sampling):
Sometimes You gotta run before you can walk.