
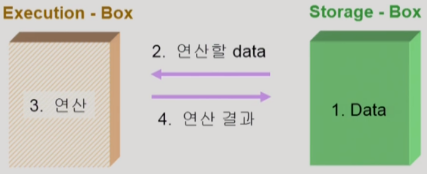
💡 데이터의 접근
데이터는 저장되는 곳(Memory)과 실행되는 곳(CPU)이 별도로 존재
1. 데이터는 스토리지에 저장
2. 실행되는 곳으로 이동
3. 연산 실행
4. 연산 결과를 다시 스토리지에 저장
✅ Execution Box : CPU, 컴퓨터 내부, 프로세스
✅ Storage Box : Memory, 디스크, 프로세스의 주소공간
Race Condition
- Storage-box를 공유하는 Execution-box가 여럿 있는 경우
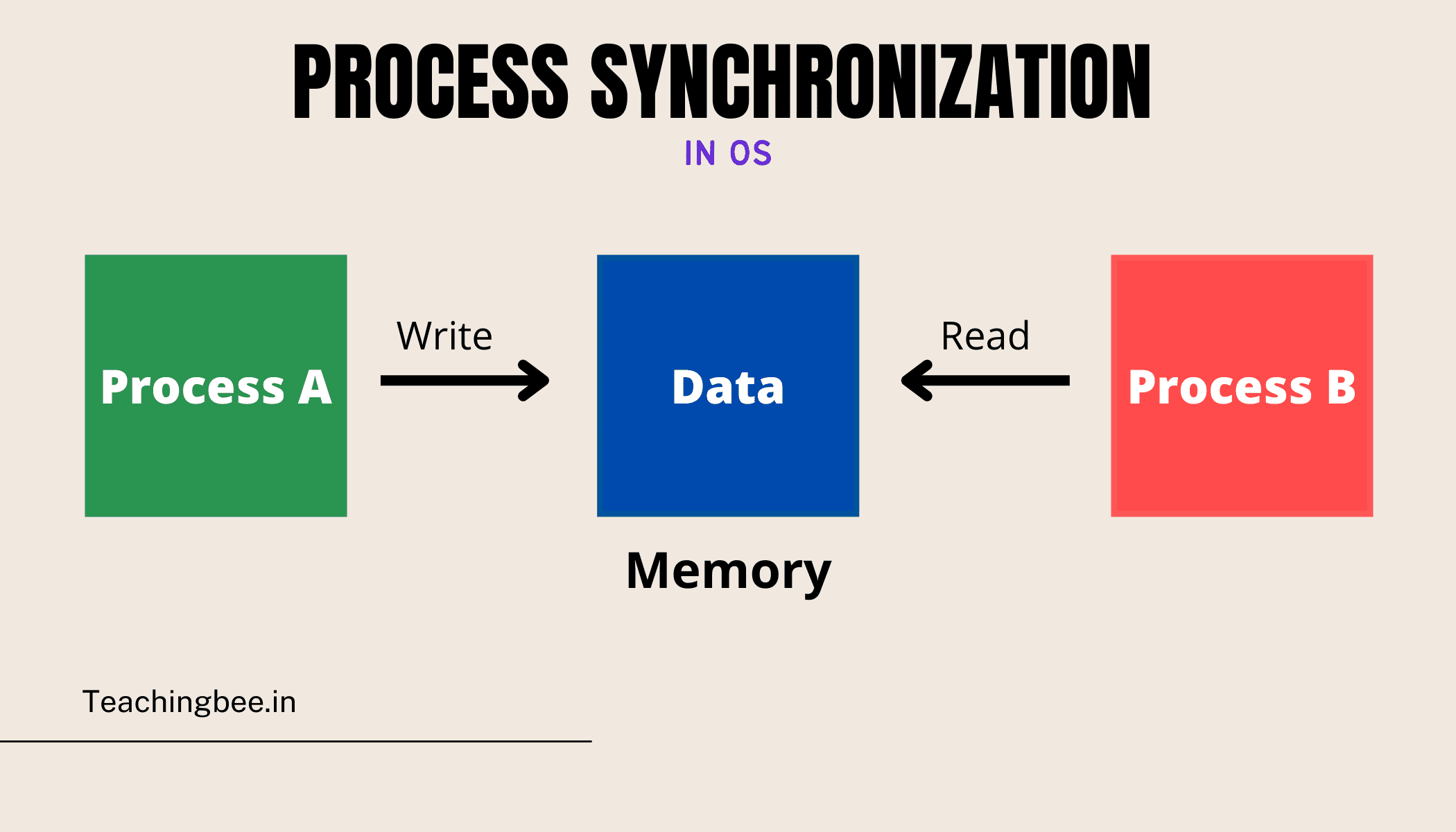
[사진 출처 - 이미지 속]
즉!
- 여러 프로세스들이 동시에 데이터에 접근하는 상황에서,
어떤 순서로 데이터에 접근하느냐에 따라 결과 값이 달라질 수 있는 상황
➡️ 데이터의 불일치 문제를 발생시킬 수 있음
언제 발생?
- kernel 수행 중 인터럽트 발생 시
- Process 가 system call을 하여 kernel mode로 수행중인데,
context switch 가 일어나는 경우 - Multiprocesser에서 shared memory 내의 kernel data
무슨소리냐구~?~?~??
하나씩 살펴보자
1. kernel 수행 중 인터럽트 발생

- 의도된 동작 :
count++, count--로 본래 값으로 돌아와야 함
- 의도와 다른 동작 :
기존 값이 10이라고 하자.
1️⃣ 커널의 Load가 수행되어 10이 load됨.
2️⃣ interupt 발생
3️⃣ 10 → 9
4️⃣ 의도대로라면 9에서 1을 더해야 하지만,
이미 1️⃣번에서 10이라는 값이 로드되었기 때문에
10+1 == 11 이 저장됨.
Kernel address space 공유
kernel 사이의 context switch 상황임.
즉, 둘다 커널 코드 == 같은 address space를 공유하기 때문에 일어난 문제
Soultion
커널 모드의 수행이 끝나기 전에는 인터럽트를 받지 않도록 하는 방법(disable/enable)으로 해결!
2. Process가 system call을 하여 kernel mode로 수행중인데, context switch가 일어나는 경우
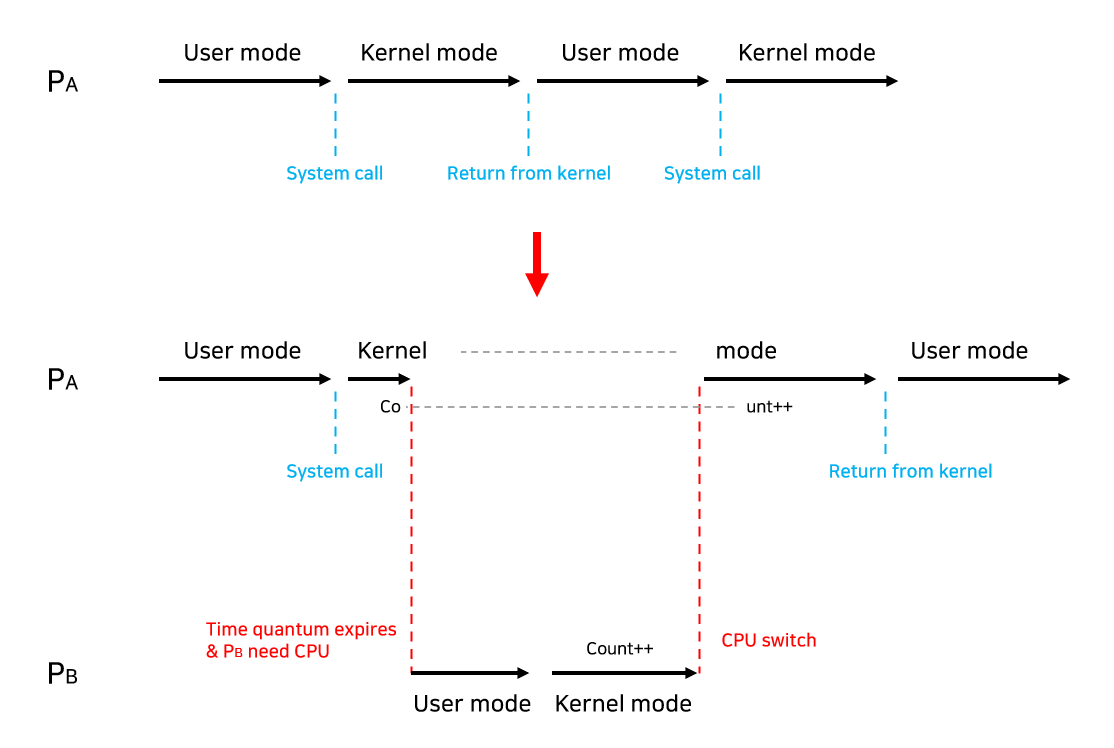
- 두 프로세스의 주소공간에서는 데이터를 공유하지 않음
- ‼️ 하지만 system call 하는 중에는 커널 주소공간의 데이터에 접근하게 됨
== share - 이 작업 중간에 CPU를 preempt 해가면 race condition이 발생하는 것!
Solution
커널 모드에서 수행중일 때는 CPU를 preempt 하지 않는다.
커널 모드에서 사용자 모드!로 돌아갈 때 preempt
3. Multiprocesser에서 shared memory 내의 kernel data
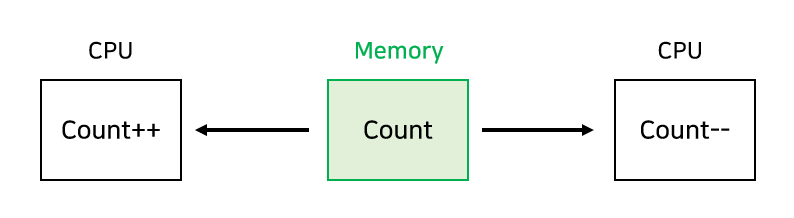
- 어떤 CPU가 마지막으로 count 값을 store했는가에 따라
결과값이 달라짐 - Multiprocessor의 경우 interrupt enable/disable로 해결 되지 않음.
(각 CPU가 독립적으로 움직이니까)
Solution
- 한번에 하나의 CPU만 커널에 들어갈 수 있게 함
➡️ 비효율적임. 사용❌
➡️ 두 프로세서가 다른 데이터에 대해 접근한거면, 사실상 race condition 발생하지 않기 때문 - 커널 내부에 있는 각 공유 데이터에 접근할 때마다
그 데이터에 대해lock/unlock
✏️ 정리하자면
- 공유 데이터의 동시 접근은 데이터 불일치를 야기시킬 수 있음.
- 따라서 데이터의 일관성 유지를 위해
협력 프소세스 간의 실행순서를 정리해주는 매커니즘이 필요하다. - race condition 상황에서 데이터의 최종 연산 결과는 마지막에 그 데이터를 다룬 프로세스에따라 달라진다.
- 이러한 race condition을 막기 위해서 concurrent process는 동기화(synchronize)되어야 한다.
The Critical-Section Problem
❓ Critical Section
코드 상에서 Race condition이 발생할 수 있는 특정 부분
== 공유 데이터를 접근하는 코드 부분
➡️ 하나의 프로세스가 critical section에 있을 때,
다른 모든 프로세스는 critical section에 들어갈 수 없어야 함.
문제 해결 조건
모든 프로세스의 수행 속도는 0보다 크다.
프로세스들 간의 상대적인 수행 속도는 가정하지 않는다.
고 가정함
Mutual Exclusion(상호배제)
프로세스 P1이 critical section 부분을 수행 중이면,
다른 모든 프로세스들은 그들의 critical section으로 들어가지 ❌
Progress(진행)
아무도 critical section에 있지 않은 상태에서,
critical section으로 들어가고자 하는 프로세스가 있다면 들어가게 해줌
Bounded Waiting(한정대기)
프로세스가 critical section에 들어가려고 요청한 후부터 그 요청이 허용될 때까지
다른 프로세스들이 critical section에 들어가는 횟수에 한계가 있어야 함
→ 기다리는 시간이 무한하면 ❌
Solution
- 두개의 프로세스 P0, P1가 있다고 가정
do {
entry section
critical section //shared variable 접근 부분
exit section
remainder section
} while(1);➡️ 프로세스들은 수행의 동기화 == 상태공유 를 위해
몇몇 변수를 "공유"할 수 있다
이렇게 공유할 수 있는 변수를 synchronzation variable이라고 함
Algorithm 1
현재 Critical Section에 들어갈 프로세스가 어떤 프로세스인지를 하나의 변수로 나타내어 일치하는 프로세스만 진입하도록 하자!
//P0의 turn의 값은 0
P1의 turn 값은 1 이라고 하자.
do {
while(turn != 0); // P0 : My turn??
critical section
turn = 1; // P0 : Now It's your turn!
remainder section
} while(1);이 알고리즘은
프로세스가 반드시 한번씩 교대로 들어가야 함
현재 프로세스(P0)가 변수 turn의 값을 다음 프로세스 값(P1)으로 바꿔줘야만! 다음 프로세스 들어갈 수 있음.
Ex.
P0의 remainder section 수행 시간이 매우 길어서 여전히 remainder section에서 수행 중이고,
P1이 수행을 한번 마치고 다시 Critical Section으로 진입하려고 한다면
turn == 0이기 때문에 진입할 수 없다.
(P0이 turn값을 1로 바꿔줘야하거든~)
➡️ Critical Section에 아무런 프로세스가 존재하지 않는 상황!
즉!!
⭕️ Mutual exclusion 은 만족하지만
❌ Progress는 만족하지 못함
Algorithm 2
특정 프로세스가 Critical Section에 진입할 준비가 되었다는 것을 나타내는 변수를 두어,
다른 프로세스가 Critical Section에 진입하려고 한다면 현재 프로세스는 기다리는 방법
do {
flag[0] = true; // Pretend I'm in
while(flag[1]); // Is he also in? then wait. .
critical section
flag[0] = false; //I'm out
remainder section
} while(1);두 프로세스가 flag = true까지만 수행하고 나면 두 프로세스 모두 무한히 Critical Section에 진입하지 못하고 기다리는 상황이 발생
즉, 얘도
⭕️ Mutual exclusion 은 만족하지만
❌ Progress는 만족하지 못함
Algorithm 3 -Peterson's Algorithm
알고리즘 1과 2를 합쳐놓은 개념
turn 변수와 flag 변수를 동시 사용
do {
flag[0] = true; // P0 들어가고자 함
turn = 1; // P1 turn
while (flag[1] && turn == 1); // P1이 들어가고자 하고, P1 차례라면
// P0는 wait
critical section
flag[0] = false;
remainder section
} while(1);P0은 flag[0] = true로 바꾸면서 Critical Section에 진입하고자 함- 그리고 turn = 1로 바꿔주면서 P1이 들어가게 한다.
- 만약
P1이 들어가고 싶고 (flag[1] == true),
현재P1이 Critical Section에 들어가 있으면 (turn == 1)
기다린다.
그렇지 않으면P0이 들어간다. - 그리고나서 Critical Section을 빠져나오면 들
어가고 싶지 않다고 flag[0] = false로 바꿔준다.
⭕️ Mutual Exclusion,
⭕️ Progress,
⭕️ Bounded waiting
모두 만족함
하지만 문제는 있음!
‼️ Busy Waiting
계속 CPU와 메모리를 사용하면서 기다림
그러면!
이 복잡한 코드 구현들이 하드웨어/소프트웨어 측면에서 어떤 지원들이 제공될까?
Synchronization Hardware
하드웨어적으로 현재 상태를 확인하고 변경하는 test & modify를
atomic(하나의 operation인것처럼)하게 수행할 수 있도록 지원하는 경우,
앞의 문제는 간단히 해결!
(많은 시스템들은 이러한 하드웨어적인 지원을 제공하고 있음)
이전까지의 알고리즘들은 데이터를 읽고 쓰는 것을 하나의 명령어로 처리할 수 없기 때문에 복잡해진 것
➡️ 메모리에서 데이터를 읽으면서 쓰는 것까지 하나의 명령어로 동시에 수행이 가능하다면 코드가 훨씬 간결해짐
이는 Test_and_Set을 이용하여 아래와 같이 구현됨
// Synchronization Variable
boolean lock = false;
do {
while (Test_and_Set(lock)); // busy waiting
critical section // lock -> TRUE. false 전까지 계속 수행
lock = false; // SET
remainder section
}하지만
‼️ 이러한 하드웨어적인 명령어는 bounded waiting 조건을 만족하지 못하는 단점 있음
Semaphores
추상 자료형
왜 사용함?
lock/unlock 방식을 간단하게 프로그래머에게 제공할수도 있음
공유자원을 획득하고 반납하는 것을 세마포어로 처리 가능
Busy Waiting 방식 구현
✅ 비효율적
Semaphores S
- 정수 값 == 공유 자원의 개수
- 아래의 두 가지 amtomic 연산
- P(S) - 공유자원 획득
while (s<=0) do no-op; // wait
S--;
// if S is positive, decrement & enter.
// otherwise, wait until positive (busy-wait)- V(S) - 공유자원 반납
S++;Block-Wakeup 방식
Block
프로세스가 "suspend" 되고
이 프로세스의 PCB를 세마포어에 대한 wait queue 에 넣음
Wake up
block된 프로세스를 wakeup
이 프로세스의 PCB를 ready queue오 옮김
Semaphores S
- 정수 값
➡️ 여기서는 "상황임"
➡️ 음수 : 자원을 기다림
양수 : 자원을 기다리지 않고 누가 쓰고 있음
즉, 누군가 깨워야할 것이 있는지 없는지를 판단하는데 사용함
- P(S) - 공유자원 획득
S.value--;
if (S.value < 0) {
add this process to S.L; // wait queue에 linked list 연결
block(); // suspend
}- V(S) - 공유자원 반납
S.value++;
if (S.value <= 0) {
remove a process P from S.L;
wakeup(P);
}Busy Waiting VS Block-Wakeup
일반적으로 Block-Wakeup 방식이 더 좋긴 한데,,,
그렇다고 무조건은 아님!
왜?
Block-Wakeup 방식은 오버헤드가 발생함.
즉. Critical section의 길이가 매우 짧은 경우!
Block-Wakeup의 오버헤드가 busy-wait 오버헤드보다 커질 수도 있음
Semaphore 종류
Counting semaphore
도메인이 0 이상인 임의의 정수값
→ resource counting에 사용Binary semaphore
0 or 1 값만 가질 수 있음
→ mutual exclusion(lock/unlock)에 사용
Deadlock & Starvation
세마포어의 문제 상황
Deadlock
둘 이상의 프로세스가 서로 상대방에 의해 충족될 수 있는 event를 무한히 기다리는 현상 (상호교차적)
➡️ 반드시 starvation 유발함
- S, Q: 1로 초기화된 semaphore
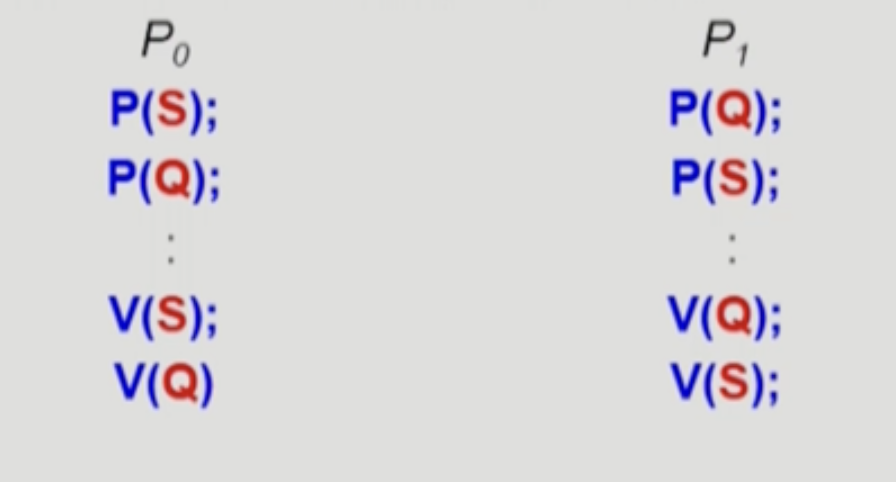
P0는 S를 잡고 한없이 Q를 기다리고
P1은 Q를 잡고 한없이 S를 기다림
(사실 이 경우, 자원의 순서만 맞춰주면 됨
P1의 자원 순서를 Q→S에서 S→Q로)
Starvation
자원을 얻지 못해서 무한히 기다림
여기서는
특정 프로세스들만 자원을 공유하면서 다른 프로세스들은 자원을 쓰지 못하는 상황을 의미!
Process Synchronization의 고전적 문제
세가지가 있음
- Bounded-Buffer Problem
- Readers-Writers Problem
- Dining-Philosophers Problem
자세히 살펴보장!
Bounded-Buffer Problem
‼️ 문제 상황
생산자 스레드들과 소비자 스레드들이 있고, 사이에 공유 버퍼가 있다고 가정하자!
만약
- 둘 이상의 생산자가
비어있는 버퍼를 동시에 보고 데이터를 만들어 넣는다면 문제가 발생할 수 있음 - 둘 이상의 소비자가
동시에 동일한 버퍼의 데이터를 사용한다면 문제가 발생할 수 있음
➡️ 따라서, 동시에 버퍼에 접근할 수 없도록 락을 걸어줘야 한다.
또,
- 버퍼가 꽉 찬 상태에서 생산자는 반드시 소비자가 버퍼의 데이터를 사용하기를 기다려야 하고,
- 버퍼가 빈 상태에서 소비자는 생산자가 버퍼를 채우기를 기다려야 한다.
해결
✅ 여기서 세마포어를 사용하자.
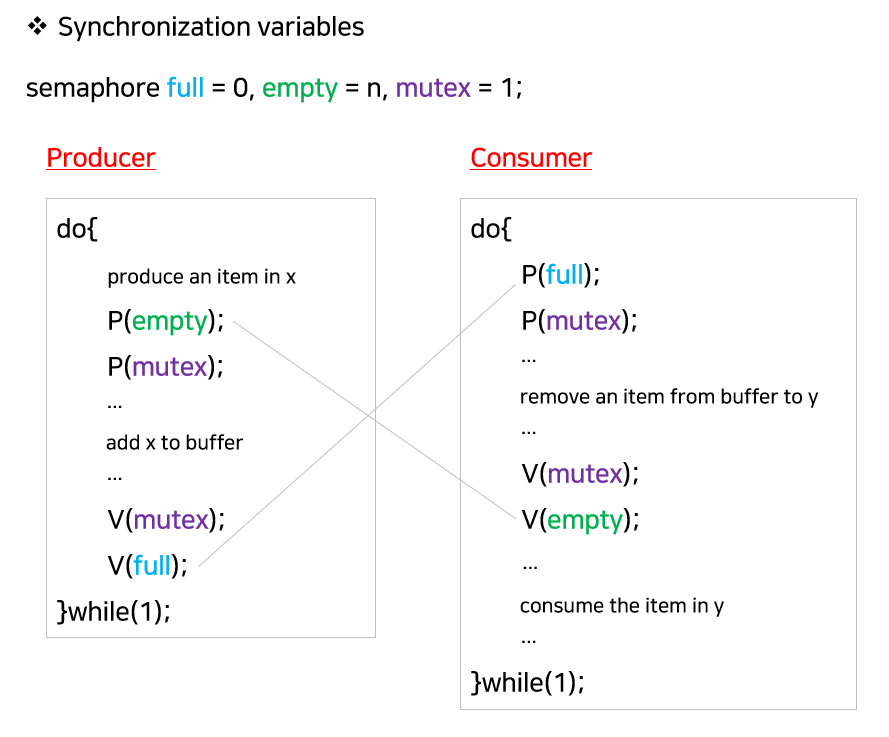
binary semaphore
producer와 consumer가 동시에 공유 buffer 접근 막기 위해
공유 buffer 전체에 lock/unlock을 걸어 배타적 접근
integer semaphore
buffer가 비었을 때 producer or consumer가 내용을 만들거나
꺼내갈 buffer가 없으면 가용자원의 개수 count
Readers-Writers Problem
한 프로세스가 데이터를
수정(Write)하는 작업을 수행할 때 다른 프로세스가 접근하면 안 되고,
읽는(Read)작업은 여러 프로세스가 동시에 수행 가능하도록 하는 문제
이를 위해
- 데이터에 대해 하나의 lock을 사용하게 되면
⭕️ 데이터의 일관성은 지킬 수 있으나,
❌ 여러 프로세스가 동시에 읽을 수 있음에도 불구하고 한 프로세스만 읽도록 강제하는 것이므로 비효율적
해결
- 현재 수정(Writer)하려고 하는 프로세스가 없다면,
대기 중인 모든Reader들의 접근을 허용하고, Writer는 대기 중인Reader가 하나도 없는 경우
접근하도록 함!Writer가 접근 중이면Reader들은 접근할 수 없도록!

→ 만약 n개의 reader가 기다리고 있다면, 제일 처음 reader만 wrt 세마포어에 넣고 나머지 n-1개의 reader는 mutex 세마포어 큐에 넣어둠으로써 효율성을 높여줌
Starvation
위 해결 방법은 Starvation의 가능성이 있음.
계속해서 reader가 들어오거나 writer가 들어오는 경우 한쪽이 계속 수행되지 않을 수 있기 때문
➡️ 이는 큐에 우선순위를 부여한다거나, 일정 시간이 지나면 자동으로 write or read가 되도록 하여 해결 가능~~~
Dining-Philosophers Problem
참 재밌는 이름이지요~
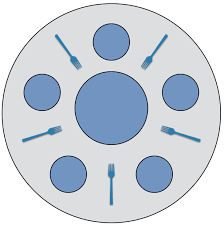
- 5명의 철학자가 원탁에 둘러앉아있고, 젓가락은 5개만
- 각 철학자는 식사를 하기를 원하고, 철학자가 식사를 하기 위해서는 양쪽 젓가락을 모두 집어야 함
💡 해결방법 1
// initially all values are 1
// 동시에 둘이 젓가락을 잡을 수 X. 무조건 한 명만.
semaphore chopsticks[5];
do {
P(chopstick[i]);
P(chopstick[(i+1) % 5]; // 요로케 양 옆 젓가락 확보
...
eat(); // 밥 먹기
...
V(chopstick[i]);
V(chopstick[(i+1) % 5]; // 두 젓가락 놓음
...
think();
...
} while(1);➡️ 이웃한 두 철학자가 동시에 먹는 경우가 없다는 것이 보장
위 알고리즘의 문제
- Deadlock
만약 모든 철학자가 식사를 하기를 원해서 각자 왼쪽에 있는 젓가락을 들었다면, 더 이상 아무런 작업도 수행할 수 없음
💡 위 문제점 해결방법!
- 4명의 철학자만이 테이블에 동시에 앉도록!
- 젓가락을 두 개 집을 수 있을 때만 젓가락을 집도록!
- 짝수/홀수 철학자는 왼쪽/오른쪽 젓가락을 먼저 집도록!
하는 방법으로 해결가넝~
// 상태. 공유 변수
enum { thinking, hungry, eating } state[5];
// 다섯 명의 철학자가 젓가락을 두 개 다 잡을 수 있어서 잡을 권한을 줄것인가 여부.
semaphore self[5] = 0; // 0 => 없음 / 1 => 있음
// lock
semaphore mutex = 1;
Philosopher i:
do {
pickup(i);
eat();
putdown(i);
think();
} while(1);
void putdown(int i) {
P(mutex);
state[i] = thinking;
test((i+4) % 5);
test((i+1) % 5);
V(mutex);
}
void pickup(int i) {
P(mutex); // lock
state[i] = hungry;
test(i);
V(mutex);
P(self[i]);
}
// i가 젓가락 두 개를 다 잡을 수 있는 상태인지 test
void test(int i) {
// (i+4) % 5 : 왼쪽 철학자 eating X
// (i+1) % 5 : 오른쪽 철학자 eating X
// hungry : 내가 지금 배고픈 상태
if (state[(i+4) % 5] != eating && state[i] == hungry && state[(i+1) % 5] != eating) {
state[i] = eating;
V(self[i]); // 젓가락 잡는 권한 부여
}
}
Reference
KOCW 공개강의 (2014-1. 이화여자대학교 - 반효경)
[운영체제(OS)] 6. 프로세스 동기화(Process Synchronization)
[운영체제] 6. Process Synchronization
