Tesseract ⇒[깃허브]
- 광학 문자 인식(OCR) 라이브러리
- 1985~1994년 사이에 휴렛 팩커드에서 개발 ⇒ 2005년 오프소스 ⇒ 2006년부터 구글에서 관리
- 2018에 4.0으로 업데이트 되면서 LSTM기반 OCR엔진 및 모델이 추가
- 총 116개의 언어가 제공
- Apache 라이선스
reorderPts 함수
삐뚤어진 명함 사진을 정렬해주는 함수
def reorderPts(pts):
idx = np.lexsort((pts[:, 1], pts[:, 0])) # 칼럼0 -> 칼럼1 순으로 정렬한 인덱스를 반환
pts = pts[idx] # x좌표로 정렬
if pts[0, 1] > pts[1, 1]:
pts[[0, 1]] = pts[[1, 0]]
if pts[2, 1] < pts[3, 1]:
pts[[2, 3]] = pts[[3, 2]]
return pts
실습
- 코드
- 임포트
import sys import numpy as np import cv2 import pytesseract - reorderPts 함수
def reorderPts(pts): idx = np.lexsort((pts[:, 1], pts[:, 0])) # 칼럼0 -> 칼럼1 순으로 정렬한 인덱스를 반환 pts = pts[idx] # x좌표로 정렬 if pts[0, 1] > pts[1, 1]: pts[[0, 1]] = pts[[1, 0]] if pts[2, 1] < pts[3, 1]: pts[[2, 3]] = pts[[3, 2]] return pts - 영상 불러오기
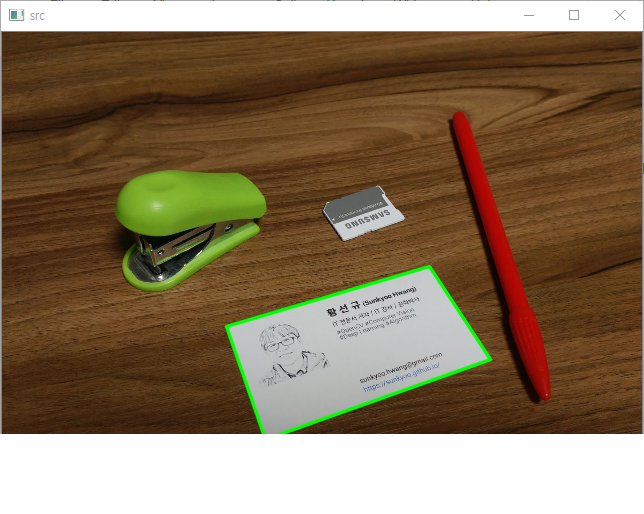
# 영상 불러오기 # filename = 'namecard1.jpg' # if len(sys.argv) > 1: # filename = sys.argv[1] src = cv2.imread('namecard3.jpg') # src = cv2.resize(src, (640, 480)) if src is None: print('Image load failed!') sys.exit() - 출력 영상 설정 및 입력영상 전처리
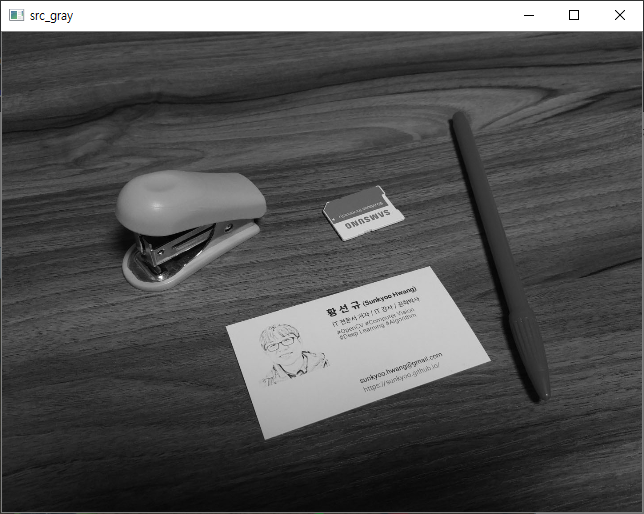
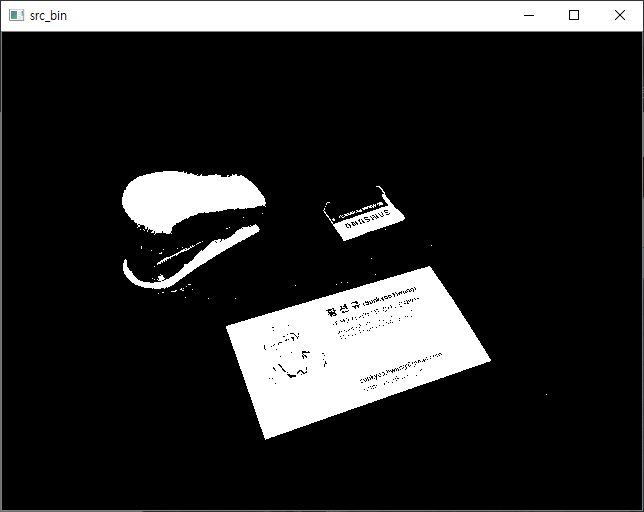
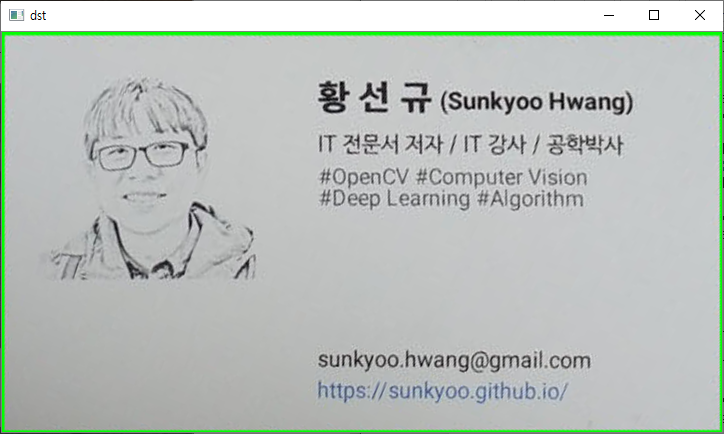
# 출력 영상 설정 dw, dh = 720, 400 srcQuad = np.array([[0, 0], [0, 0], [0, 0], [0, 0]], np.float32) dstQuad = np.array([[0, 0], [0, dh], [dw, dh], [dw, 0]], np.float32) dst = np.zeros((dh, dw), np.uint8) # 입력 영상 전처리 src_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) th, src_bin = cv2.threshold(src_gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) - 외곽선 처리
# 외곽선 검출 및 명함 검출 contours, _ = cv2.findContours(src_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) for pts in contours: # 너무 작은 객체는 제외 if cv2.contourArea(pts) < 10: continue # 외곽선 근사화 approx = cv2.approxPolyDP(pts, cv2.arcLength(pts, True)*0.02, True) # 컨벡스가 아니면 제외 if not cv2.isContourConvex(approx) or len(approx) != 4: continue cv2.polylines(src, [approx], True, (0, 255, 0), 2, cv2.LINE_AA) srcQuad = reorderPts(approx.reshape(4, 2).astype(np.float32)) pers = cv2.getPerspectiveTransform(srcQuad, dstQuad) # cv2.INTER_CUBIC => 화질을 좀 더 좋게.. dst = cv2.warpPerspective(src, pers, (dw, dh), flags=cv2.INTER_CUBIC) dst_rgb = cv2.cvtColor(dst, cv2.COLOR_BGR2RGB) print(pytesseract.image_to_string(dst_rgb, lang='Hangul+eng')) - 출력
cv2.imshow('src', src) cv2.imshow('src_gray', src_gray) cv2.imshow('src_bin', src_bin) cv2.imshow('dst', dst) cv2.waitKey() cv2.destroyAllWindows()
- 임포트
- 결과