개발환경
거북이 로봇은 총 3곳에 미리 setting 해야한다.
1. Remote PC
2. 라즈베리 파이
3. OpenCr
Remote PC 설정
느림보 거북이 로봇 설정은 다양한 버전을 갖고 있다.
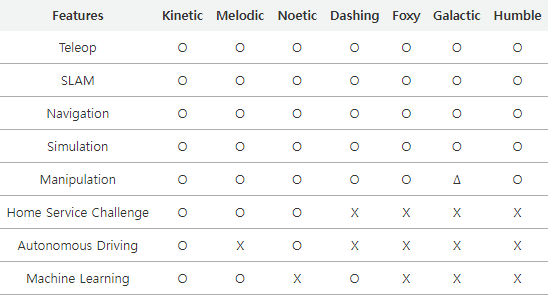
나는 SLAM과 Navigation을 공부할 계획이어서 Foxy 버전을 선택했다.
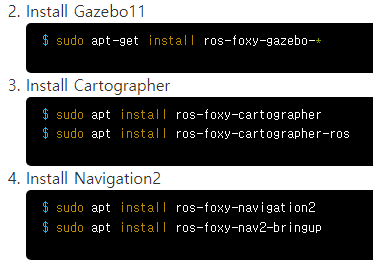
Foxy를 선택하면 아래 처럼 설명이 쭉 나오고 그대로 따라하면 된다.
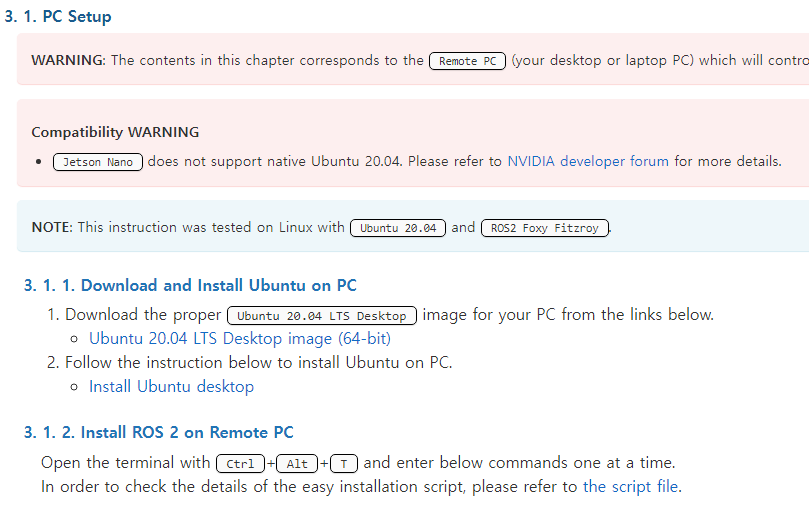
설치를 진행하다보면 에러 메시지가 발생할 수 있지만, 포기하지 말자🔥!!
라즈베리파이(SBC)
1) 라즈베리파이 이미지를 raspberry Pi Imager를 통해 SD카드에 굽는다
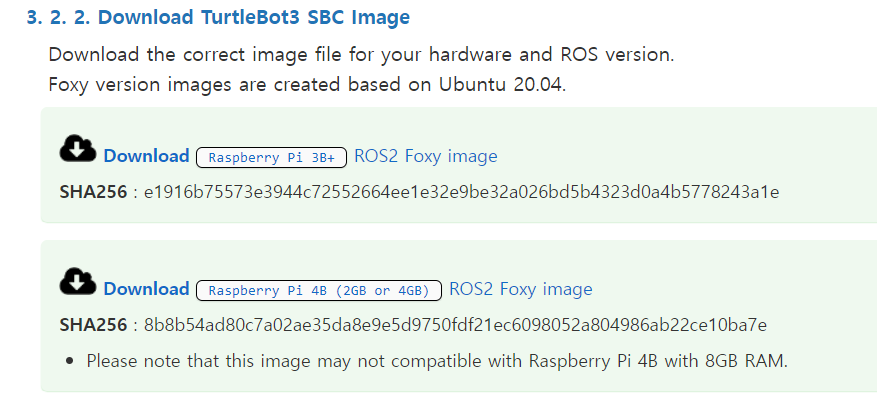
2) 라즈베리파이에 SD카드를 넣으면 설치 완료
OpenCR
- 라즈베리파이 설치가 완료되면 아래 명령 실행
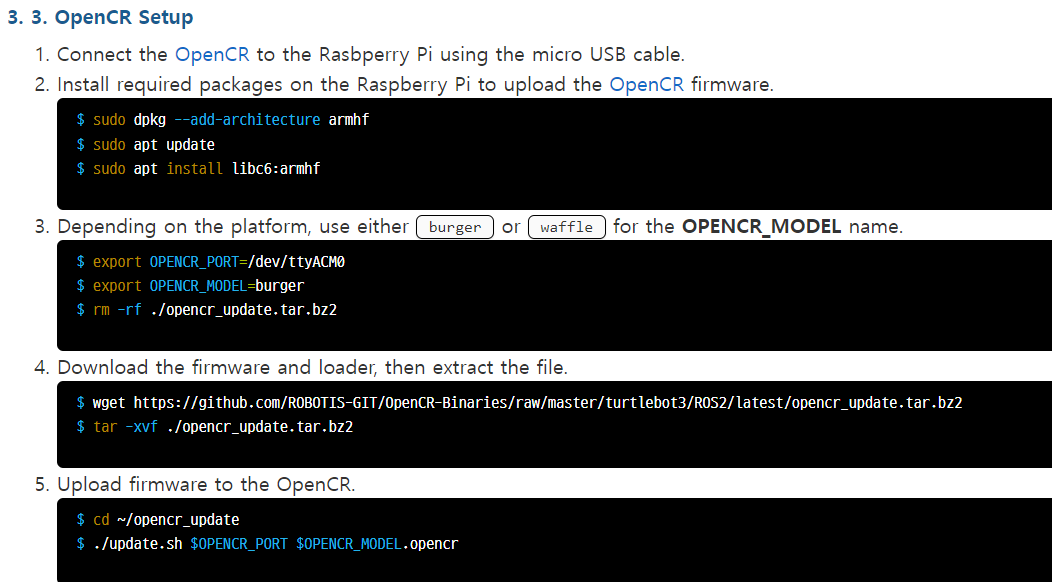
- 펌웨어 업로드가 제대로 되지 않을 경우에는 arduino ide에서 직접 펌웨어를 다운 받아준다.
My PC
OS: VMware17 ubunto 20.04 desktop
ROS: ROS2 Foxy Fitzroy
출처: https://emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/

열심히 배워서 저도 알려주세요(ง •_•)ง