[CV] #14. 지역 특징점 검출과 매칭
BFMatcherDMatchDescriptorMatcherFAST 코너 검출FlannBasedMatchercorner detectionimage stitchingopencvsift모라벡 알고리즘영상 이어 붙이기컴퓨터비전크기 불변 특징점 알고리즘해리스 코너 검출호모그래피
Computer Vision
목록 보기
16/18
Feature 특징
- 영상으로부터 추출할 수 있는 유용한 정보 ex. 평균 밝기, 히스토그램, 에지, 직선 성분, 코너 등
- 지역 특징 local feature
- 영상 전체가 아닌 일부 영역에서 추출할 수 있는 특징
- ex. 에지, 직선 성분, 코너
- corner
- 에지의 방향이 급격하게 변하는 부분 ex. 삼각형 꼭지점
- 높은 분별력 → 유용
- 에지의 방향이 급격하게 변하는 부분 ex. 삼각형 꼭지점
- feature point 특징점
- 코너처럼 한 점의 형태로 표현할 수 있는 특징
- = keypoint, interest point
지역 특징의 조건
- 반복성
- 불변성
- 분별력
- 지역성
- 적당한 양
- 계산 효율
#14-1. 코너 검출
코너 검출 방법
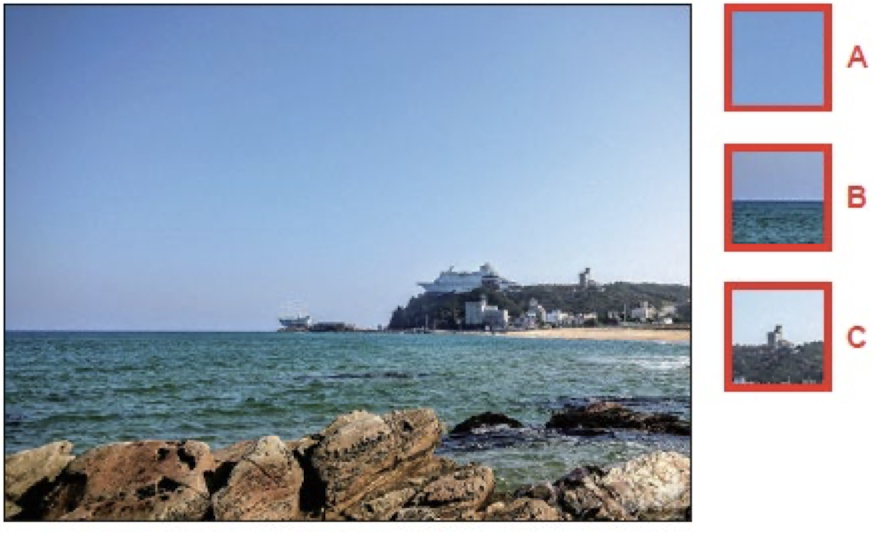
- A영상
- 평탄한 영역
- 하늘 전체가 A와 비슷한 픽셀 값 분포
- B영상
- 수평선 부근 추출 확인 가능
- 정확한 x 좌표는 가늠 X
- C영상
- 특정 건물 뾰족하게
- 원본 영상 오른쪽 산등성이에서 유일한 위치 탐색 가능
- 튀어나와있는 건물 = 코너 역할 → 위치 파악 수월
모라벡 알고리즘
- 여러 방향에 대해 색상 변화를 측정하는 제곱차의 합

해리스 코너 검출 방법
harris = cv2.cornerHarris(src, 3, 3, 0.04)
harris_norm = cv2.normalize(harris, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
for y in range(harris_norm.shape[0]):
for x in range(harris_norm.shape[1]):
if harris_norm[y, x] > 120:
if (harris[y, x] > harris[y-1, x] and
harris[y, x] > harris[y-1, x] and
harris[y, x] > harris[y-1, x] and
harris[y, x] > harris[y-1, x]):
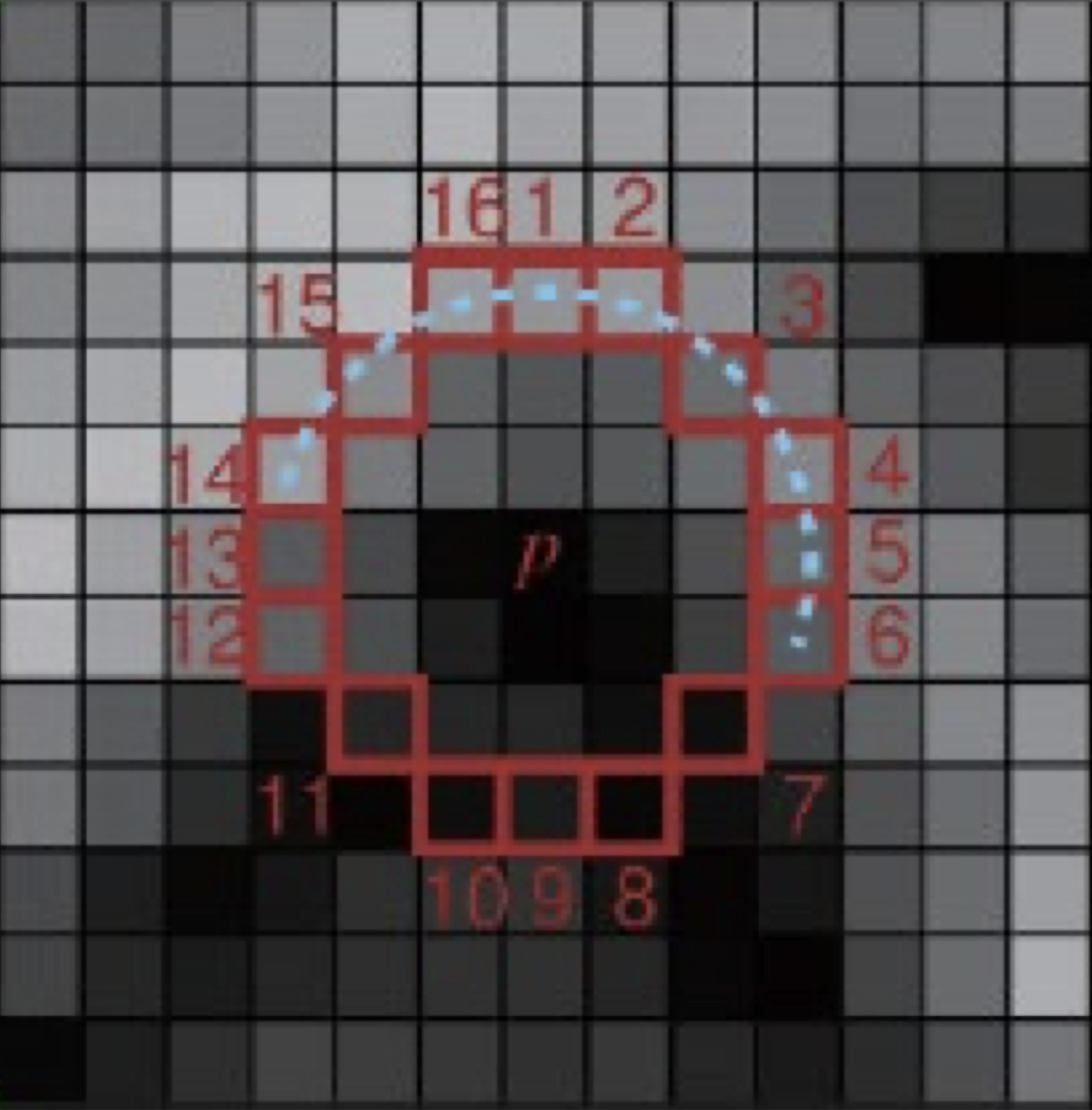
cv2.circle(dst, (x, y), 5, (0,0,255), 2)FAST 코너 검출 방법
- 기존의 코너 검출 방법 : 복잡한 연산, 연산 속도 감소
- 단순한 픽셀 값 비교 방법
- Features from Accelerated Segment Test
- 16개 픽셀 중 점 p보다 밝거나 어두운 픽셀이 9개 이상 존재 → 코너
-
, 픽셀이 아홉개 이상 연속
-
t : 충분히 밝거나 어두운 정도를 조절하기 위한 임계값
-
- 비최대 억제 작업 추가적으로 수행
- 가장 코너에 적합한 픽셀 선택
- 코너 점수 : 코너점, 주변 16개 점과의 픽셀 값 차이 합
- 최종 코너 : 코너점수가 큰 코너
- FAST(image, keypoints, threshold, nonmaxSuppression = true)
- nonmaxSuppression : 비최대 억제 수행 여부
fast = cv2.FastFeatureDetector_create(60)
keypoints = fast.detect(src)
dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
for kp in keypoints:
pt = (int(kp.pt[0]), int(kp.pt[1]))
cv2.circle(dst, pt, 5, (0, 0, 255), 2)#14-2. 크기 불변 특징점 검출과 기술
크기 불변 특징점 알고리즘
-
코너 : 회전 불변 특징점
-
영상의 크기 변경될 경우 불변 X
→ 코너보다는 edge에 가까운 형태
-
SIFT (Scale Invariant Feature Transform) : 크기 불변 특징 변환
- 크기가 다른 영상에서도 지속적으로 검출될 수 있는 크기 불변 특징 연구
- 스케일 스페이스 구성 → 영상에 다양한 표준편차를 이용한 가우시안 브럴링 적용하여 구성한 영상 집합
- octave (옥타브) : 영상 집합 → 가로, 세로 반으로 줄여 가면서 여러 옥타브 구성
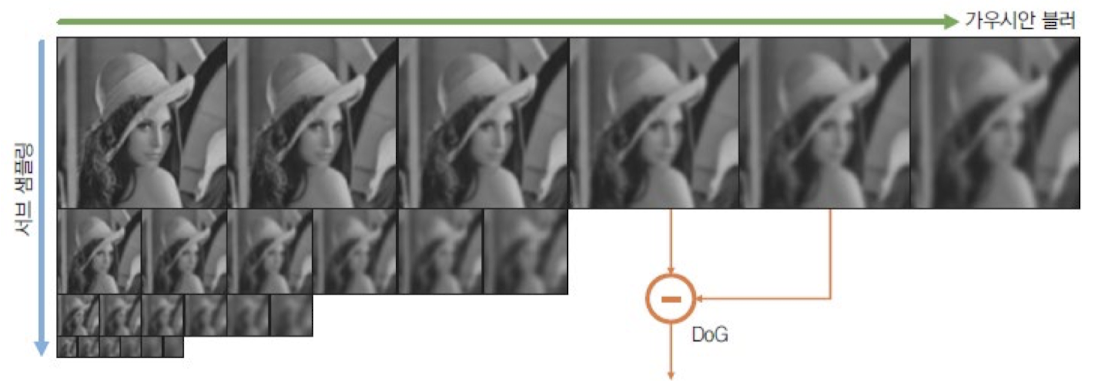
- 변화량의 극댓값, 극솟값
특징점 기술자
- 특징점 주변영상의 ㅡㅡㅡㅡㅡㅡㅡㅡㅡㅡㄱ
- 여러개의실수값으로
SIFT 특징점 검출
12/7까지 진도가 기말고사
#14-3. 특징점 매칭
OpenCV 특징점 매칭
- 특징점 매칭
- 두 영상에서 추출한 특징점 기술자 비교
- 서로 비슷한 특징점 찾는 작업
- DMatch 클래스
- distance
- 두 키포인트 기술자가 얼마나 차이가 나는지 나타내는 매칭 척도의 역할
- 유사 : 0 / 서로 다른 특징점 : 큰 값
- 주로 다차원 벡터의 유클리드 거리로 계산 → 이진 기술자끼리 비교 : 해밍거리 사용
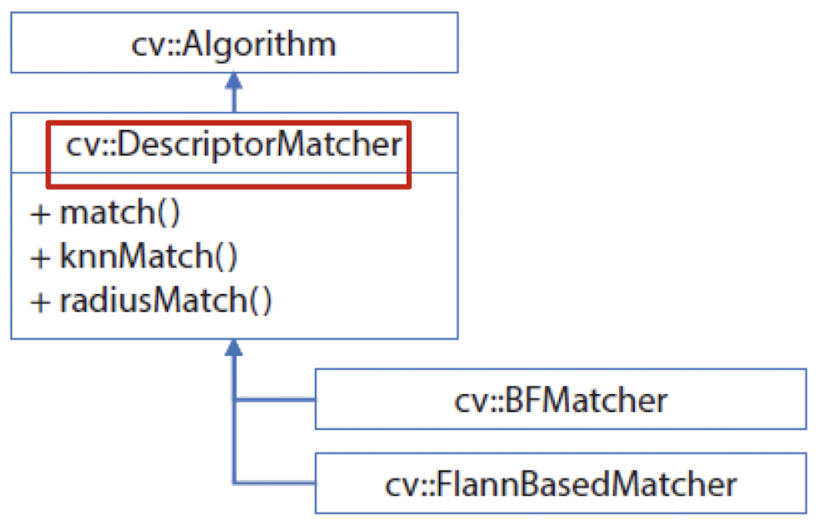
- DescriptorMatcher 클래스
-
match() : 가장 비슷한 기술자 쌍 하나 찾기
-
knnMatch() : 가장 비슷한 기술자 쌍 k개 찾기
-
radiusMatch() : 지정한 거리 반경 안에 있는 기술자 쌍 모두 찾기
→ BFMatcher 클래스, FlannBasedMatcher 클래스가 상속 받음
-
- BFMatcher 클래스
-
전수조차(Brute-Force) 매칭
-
질의 기술자 집합 - 훈련 기술자 집합 거리 계산
→ 이 중 가장 거리가 작은 기술자 찾아 매칭
-
매우 직관적
-
특징점 개수 늘어날수록 거리 계산 횟수 급격하게 늘어남 (연산량 증가)
→ FlannBasedMatcher 클래스가 더 효율적
-
- FlannBasedMatcher 클래스
- Flann(Fast Library approximate nearest neighbors) : 근사화된 최근방 이웃 알고리즘을 빠르게 구현한 라이브러리
- 근사화된 거리 계산 방법 사용 (L2 norm) → 해밍거리 사용하는 이진 기술자에 사용 불가
- Optimal point 못 찾을 수도 있음.
- 빠른 동작
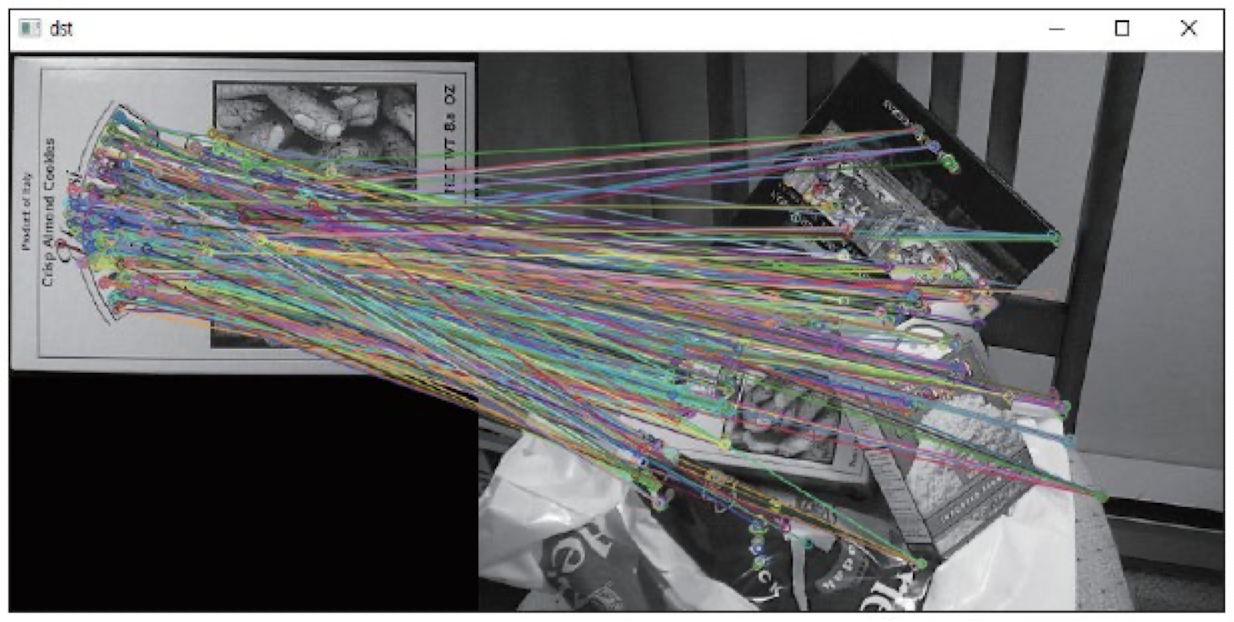
- drawMatches(img1, keypoints1, img2, keypoints2, …)
-
매칭 결과 가로로 이어 붙임
-
추출한 특징점, 매칭 결과를 다양한 색상으로 표시
-
호모그래피와 영상 매칭
#14-4. 영상 이어 붙이기
영상 이어 붙이기
- image stitching
- 여러 장의 영상을 서로 이어 붙여서 하나의 큰 영상을 만드는 기법
- 파노라마 영상(panorama image) 생성하는 기법
- 입력 영상들이 서로 일정 비율 이상으로 겹치는 영역이 존재해야함 → 서로 같은 위치 분간할 수 있도록 유효한 특징점 많이 있어야함
- 입력영상에서 특징점 검출 → 서로 매칭 수행 → 호모그래피 구하기 → 호모그래피 행렬 기반으로 입력 영상 변형하여 서로 이어붙이는 작업 수행 → 자연스럽게 보이도록 블렌딩 (영상의 밝기 적절하게 보정)
imgs = []
for i in range(1, argc):
img = cv2.imread(sys.argv[i])
if img is None:
print('Image load failed!')
exit()
imgs.append(img)
stitcher = cv2.Stitcher_create()
status, dst = stitcher.stitch(imgs)
if status != cv2.Stitcher_OK:
print('Error on stitching!')
exit()
cv2.imshow('dst', dst)
- 결과 영상 주변부에 검은색으로 채워지는 영역 발생할 수 있음

숭실대학교 컴퓨터학부 21