0. 기본적인 SLAM 문제의 구성
- “SLAM은 local observation을 모아 global model을 만드는 것이다“.
- 여기서 local observation은 특정 시점의 센서 데이터 (e.g. 이미지, 라이다 스캔)을 의미하고,
- global model은
3D scene geometry와 trajectory 정보를 의미하는 것
- Local observation을 의미하는 Y 데이터와 global model X가 있을 때, Joint likelihood인 P(Y|X) 을 작은 conditional likelihood로 표현하면 아래와 같은 식이 된다.
- 결국 작은 likelihood를 모아 확률론적으로 가장 정확한 global model을 찾는다는 말이 된다.
- 그리고 SLAM 문제를 잘 표현하기 위해 우리는 probabilistic graphical model을 사용한다.
- 사실 이렇게 길게 잘 표현하지는 않고, factor graph라고 부르는 경우가 더 많다.
- Factor graph를 통해 우리는
- 수많은 state 사이의
conditional dependency및joint distribution을 표현할 수 있다.
- 수많은 state 사이의
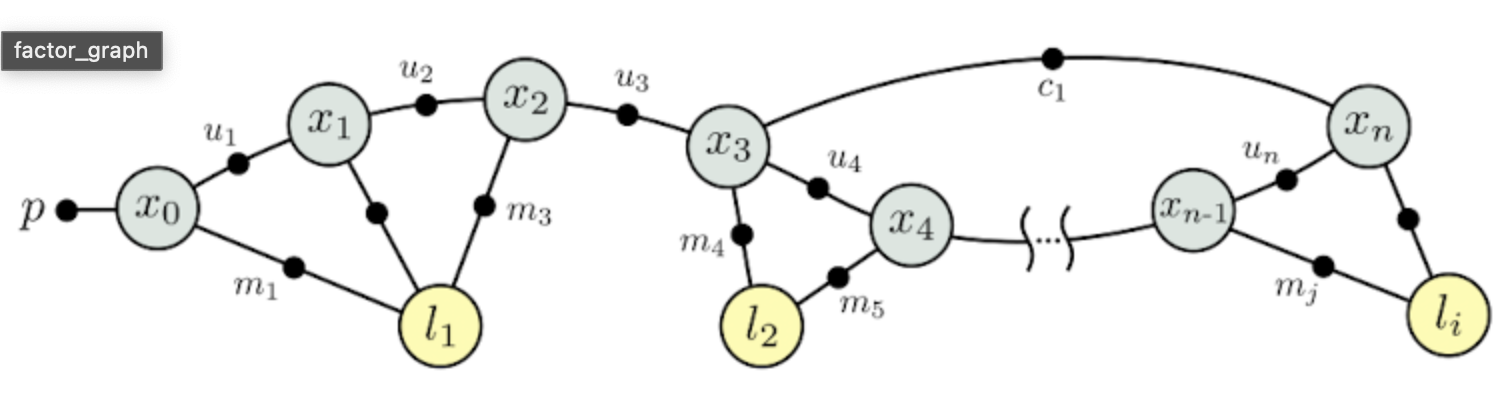
- 이렇게 joint distribution을 찾아낸 후, joint optimization을 통해 최적의 global model을 찾는게 SLAM이라고 볼 수 있다.
- Joint optimization을 위해 iSAM, GTSAM, g2o, Ceres-solver와 같은 비선형 최적화 라이브러리를 사용한다.
- 가장 효율적인 SLAM을 하기 위해서는 2가지 고려할 점이 생긴다.
- 첫째는 Representation -
- ‘시스템 모델 X는 어떤 정보를 담고 있어야하는가? 이 정보는 인풋 데이터 Y와 어떤 관계를 가지고 있는가?“
- 둘째는 Inference -
- ‘X와 Y 사이의 Joint probability distribution을 풀기 위해 어떤 방법을 사용해야하는가?“ 이다.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.