- RealSense 카메라가 있다면,
sensors/realsense_recorder.py를 사용하여 RGB-D 프레임을 쉽게 캡처할 수 있습니다.
참고
- 이 튜토리얼은 사용 환경에 유효한 RealSense Python 패키지와 OpenCV Python 패키지가 설치되어 있다고 가정합니다.
- RealSense Python 패키지를 설치하려면 이 지침을 따르세요.
입력 인자
- 이 스크립트는 다음 세 가지 옵션 중 하나로 실행할 수 있습니다:
python realsense_recorder.py --record_imgs
python realsense_recorder.py --record_rosbag
python realsense_recorder.py --playback_rosbag--record_imgs및--record_rosbag모드에서는 다음과 같은 캡처 미리보기가 표시됩니다: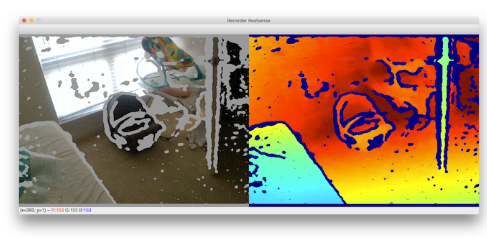
- 왼쪽에는 잘못된 깊이 영역이 회색으로 표시된 컬러 이미지가, 오른쪽에는 제트 컬러로 색상화된 깊이 맵이 나타납니다.
- 잘못된 깊이 픽셀은 객체 경계, 불확실한 영역, 또는 먼 영역(3m 이상)을 나타냅니다.
- 재구성 품질을 높이기 위해 회색 픽셀이 너무 많은 프레임은 피하는 것이 좋습니다.
- 기본적으로,
--record_imgs모드에서는 정렬된 컬러 및 깊이 이미지를dataset/realsense폴더에 저장하며,- 이 데이터는 재구성 시스템에 사용할 수 있습니다.
dataset
└── realsense
├── camera_intrinsic.json
├── color
│ ├── 000000.jpg
│ ├── :
└── depth
├── 000000.png
├── :camera_intrinsic.json은 사용된 RealSense 카메라의 내재 파라미터를 포함하고 있습니다.- 이 파라미터 세트는 해당 데이터셋과 함께 사용되어야 합니다.
새로운 설정 파일 생성
- 새 데이터셋의 경로를 지정하려면 새로운 설정 파일이 필요합니다. 이 목적을 위해
config/realsense.json이 제공됩니다.
{
"name": "Realsense bag file",
"path_dataset": "dataset/realsense.bag",
"path_intrinsic": "optional/read_from_bag_file.json",
"depth_max": 3.0,
"voxel_size": 0.05,
"depth_diff_max": 0.07,
"preference_loop_closure_odometry": 0.1,
"preference_loop_closure_registration": 5.0,
"tsdf_cubic_size": 3.0,
"icp_method": "color",
"global_registration": "ransac",
"python_multi_threading": true
}path_dataset과path_intrinsic은 데이터셋과 내재 파라미터의 경로를 나타냅니다.
재구성 시스템 실행
- 새로운 설정 파일을 사용하여 시스템을 실행하세요.
cd examples/python/reconstruction_system/
python run_system.py config/realsense.json [--make] [--register] [--refine] [--integrate]
새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.