0. 목표 달성 전, 대안 마련
- 구로봇으로 돌립니다. pose가 잘 나오도록 ros2 bag 모으기
1. 목표
RGBD + 제대로 된 pose나오게 해서 -> ros2 bag 데이터 모으기
2. 목표 달성을 위한 Milestone
2.1. rgbd publish 하기
-
브랜치: experimental/human-aware-from-demo
- 로봇에 들어가서,
- next-navigation 폴더를 먼저 위 브랜치로 checkout
- next-navigation/bringup/ 에서 ./bringup.sh
- ros2 topic list
ros2 bag record -o 09082025
-
next-navigation/bringup/around/launcher.lua77 ~ 94 번째 줄 주석 해제하기 (17줄)
-
realsense0.lua코드 추가하기
-
extrinsic 줄자로 측정해서 기록하기 -
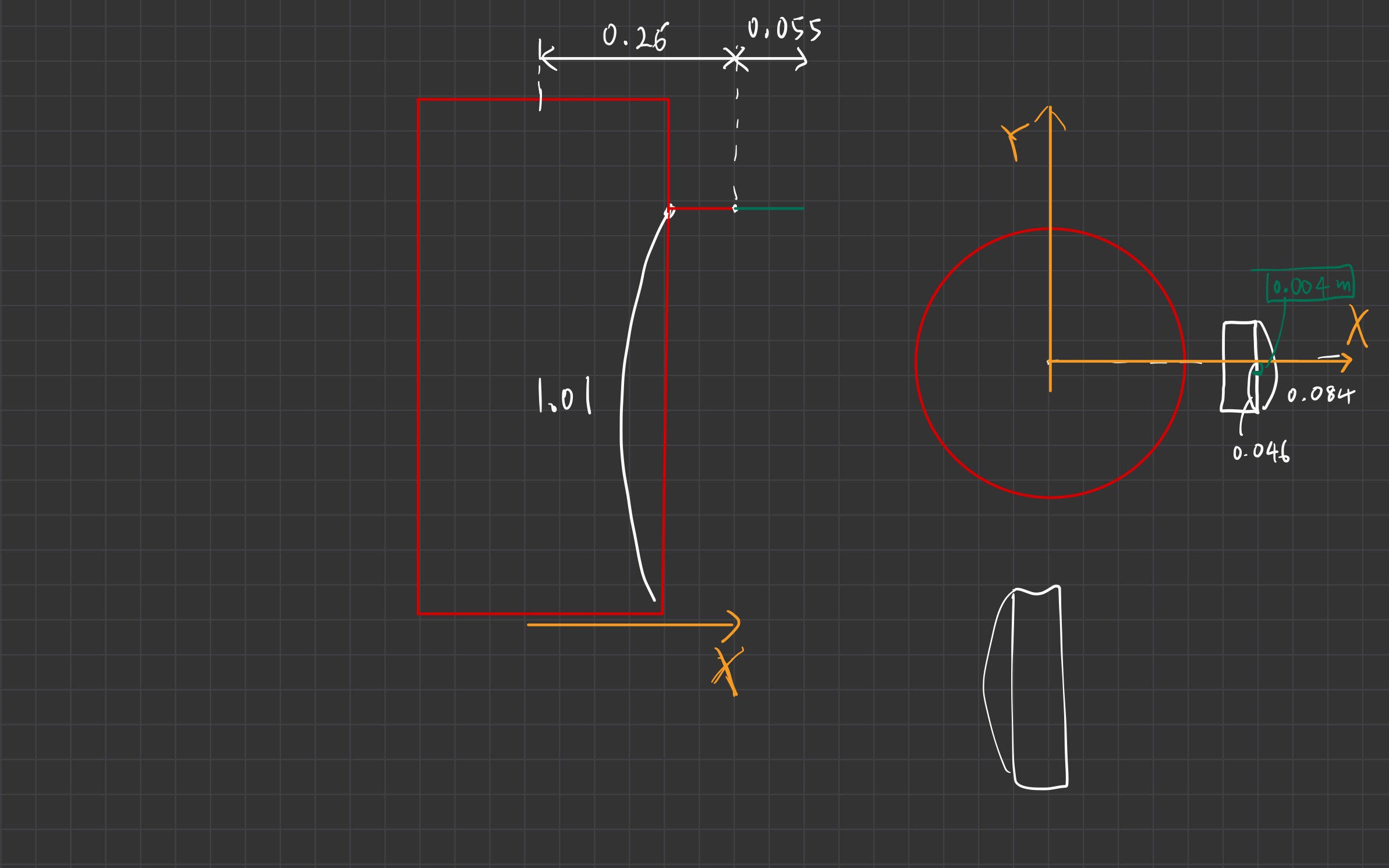
- 기록해서, concept-graph 코드에 넣기
2.2.1. ISSUE debugging
/etc/udev/rules.d/realsense.rules를 아래와 같이 입력함SUBSYSTEM=="video4linux", KERNELS=="1-6", ATTRS{idVendor}=="8086", ATTRS{idProduct}=="0b07", ENV{ID_USB_INTERFACE_NUM}=="00", ATTR{index}=="0", SYMLINK+="realsense0"
sudo udevadm control --reload-rules
sudo udevadm trigger
ls -l /dev/realsense0- bringup_script 도 제대로 작성 완료
- launcher.lua 수정 완료했고, realsense0.lua 도 수정 완료 했음
2.2. 제대로 된 pose publish 하기
- GUI를 보면서, pose가 제대로 잡히고 있는지 파악하기
- GUI를 어디서 보나?

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.