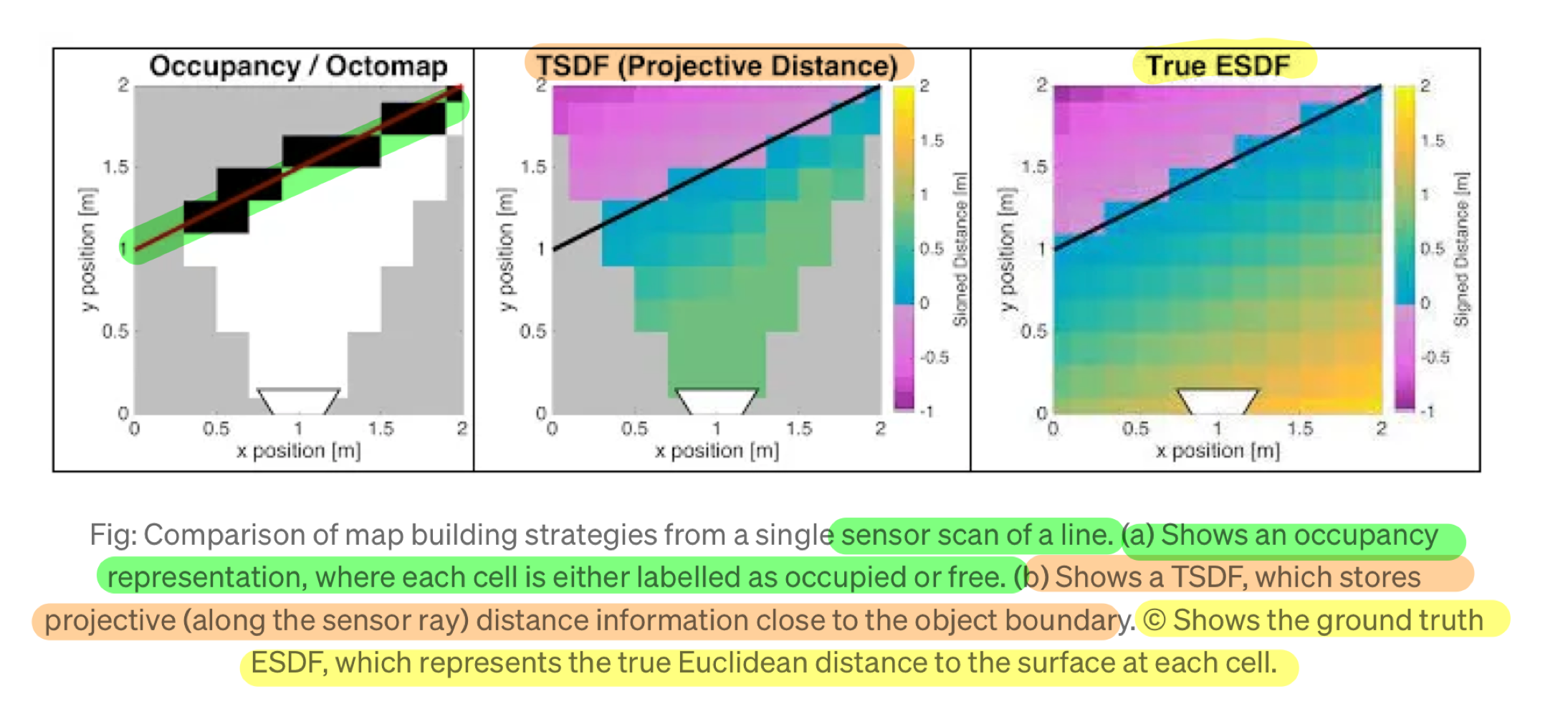
- Signed Distance Field (SDF)
- 충돌 검지와 충돌 cost를 계산하는데 쓰임
Octomap의 단점?
- octomap은 laser 측정을 위해 design 되었는데, laser은 센서와의 거리에 따라 정확도가 떨어지지 않음
- 하지만, vision-based depth sensing은 거리가 증가함에 따라 오류가 커지는데, 이는 octomap에 적합하지 않음
- ray-cast의 끝 점 하나에만 점유 확률을 표시하는 방식이기 떄문에,
- 마찬가지로 vision-based depth sensing은 거리가 증가함에 따라 오류가 커지는 특성에 적합하지 않음.
Truncated Signed Distance Field (TSDF)
- 일정 거리 이상은 절단하여 값을 가지지 않도록 함
- zero crossing을 이용해서, 표면의 위치를 암시적으로 계산하기 위한
- 빠르고 flexible한 map 표현
- voxel의 거리:
- 센서의 중앙으로부터 나온 ray direction을 따라, 표면과의 거리를 측정
- 압축률이 좋고,
- approximate distance metric(근사 거리 측정 방식)으로 인한 에러가 적다.
- TSDF의 한 가지 장점:
이산화되었을 때도 연속적인 함수를 모델링한다는 점 - 따라서
최소 복셀 크기보다 높은 정밀도로 표면의 위치를 복원할 수 있어더 큰 복셀을 사용할 수 있으며,그로 인해 메모리에서 더 작은 맵을 사용할 수 있습니다.
- Octomap에 비해 또 다른 장점:
TSDF가 각 복셀에 대해 두 가지 값을 가진다표면까지의 거리(카메라에서의 광선을 따라)와이 측정값의 가중치/확률
- 이를 통해 비전 기반 깊이 추정의 실제 오류를 더 정확하게 모델링할 수 있으며,
- 여러 측정값을 병합할 때 표면의 maximum-likelihood estimation으로 이어짐
- 표면은 zero crossing로 발견되기 때문
Euclidean Signed Distance Field (ESDF)
- 복잡한 형상의 collision checking에 쓰임
- object와의 거리와 gradients를 계산하는데에 용이
- large free area를 찾는데 용이
- 각 free voxel의 거리:
- 가장 가까운 occupied cell과의 최소 거리
- 모든 voxel에 대해 거리 계산

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.