-
from SLAM to Spatial Perception with 3D Dynamic Scene Graphs
-1. 그림들
-1.1.
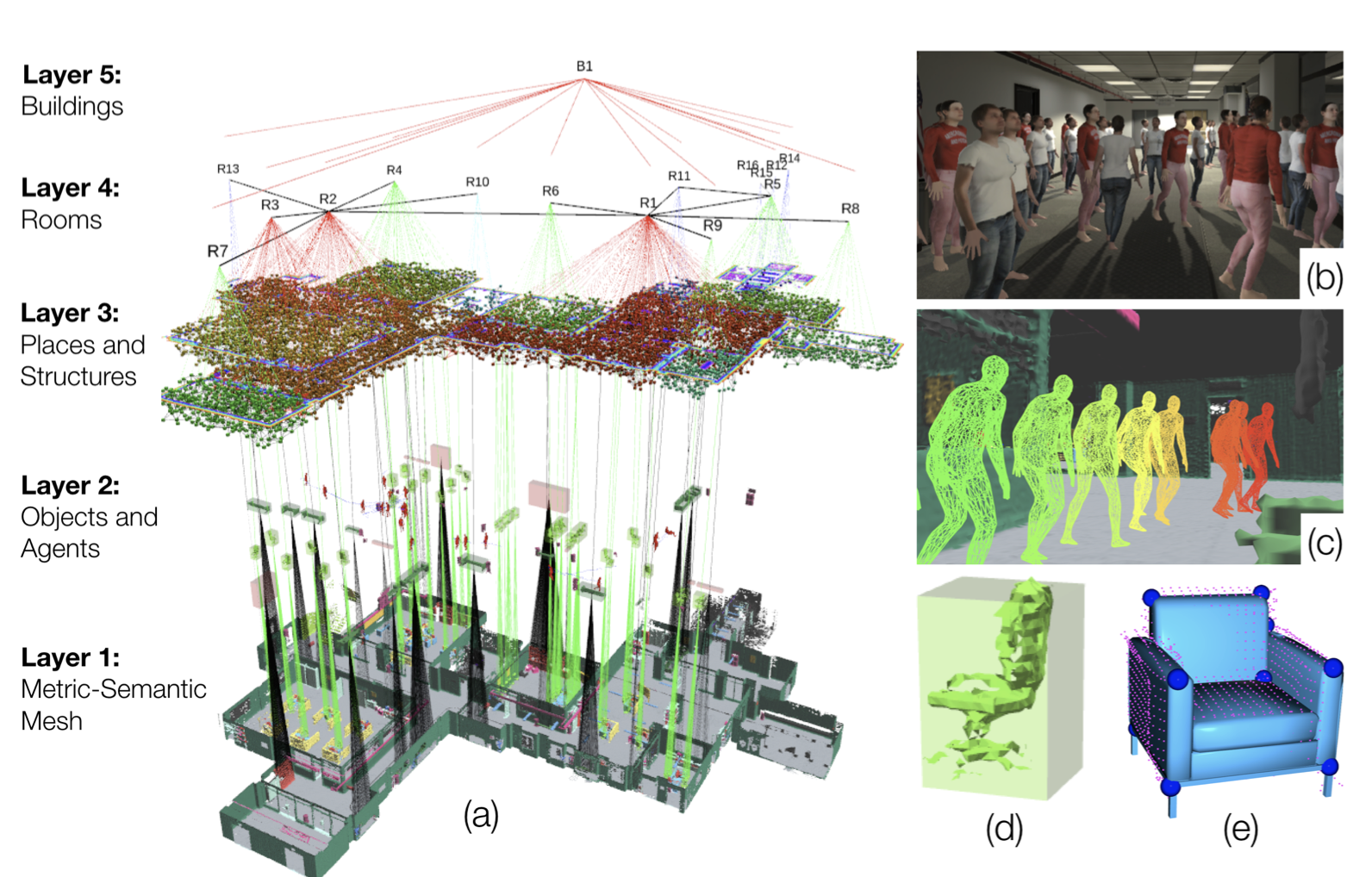
- (a) 3D 동적 장면 그래프(DSG):
- 밀집된 3D 모델(예: metric-semantic mesh) -> 추상화 -> 더 높은 수준의 공간 개념(예: 객체, 에이전트, 장소, 방)
- 이들의
시공간 관계(예: "에이전트 A는 시간 t에 방 B에 있다")를 모델링하는 계층적 표현
- Kimera는
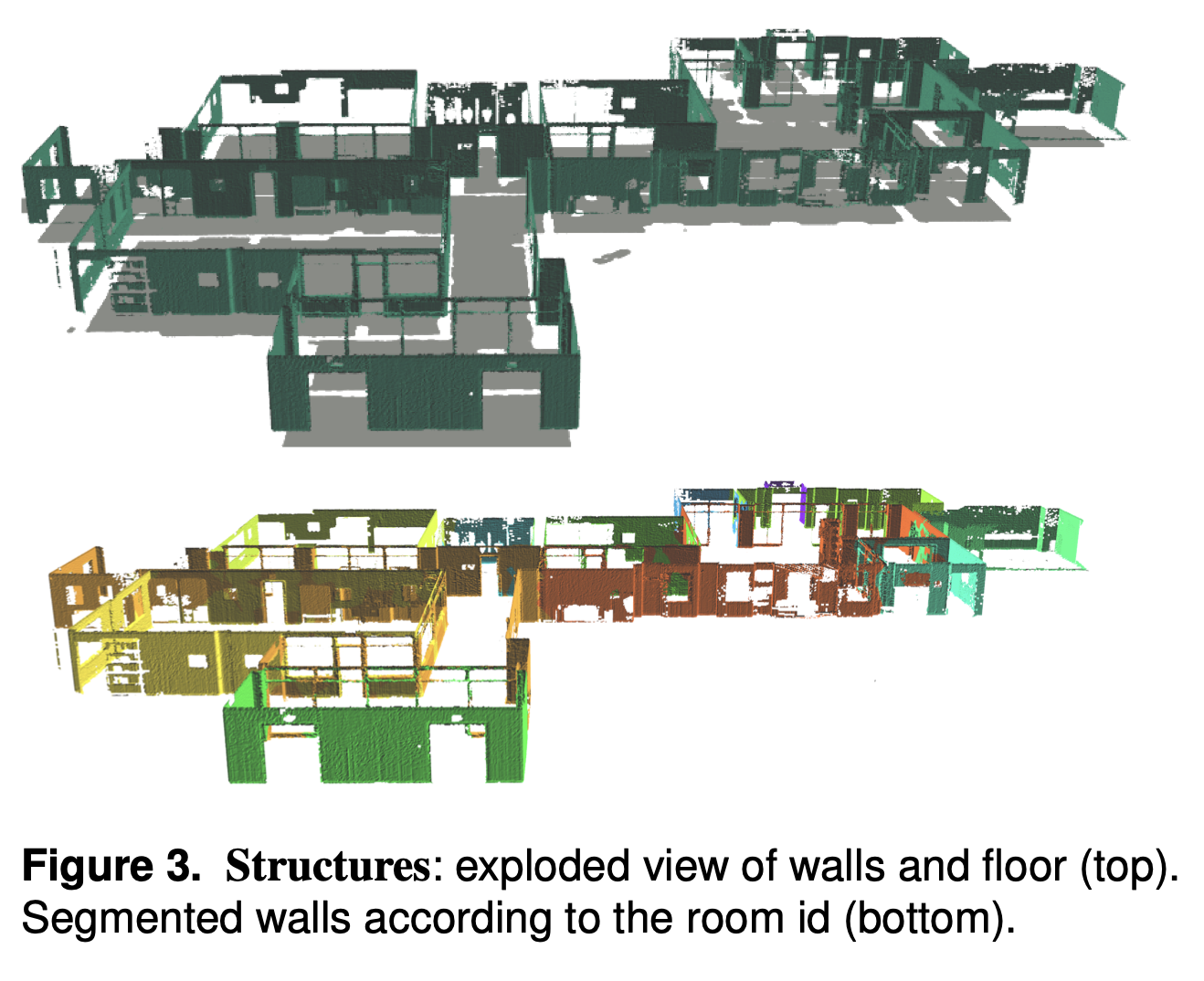
visual-inertial data를 통해 DSG를 재구성하는 최초의 공간 인식 엔진- (a) 장소, 구조물(예: 벽), 방을 분할
- (b) 매우 혼잡한 환경에서도 견고
- (c) 인간 에이전트의 밀집된 메쉬 모델을 실시간으로 추적(track)
- (d) 형태가 알려지지 않은 객체의 중심 및 경계 상자를 추정
- (e) CAD 모델이 제공된 객체의 3D 자세를 추정
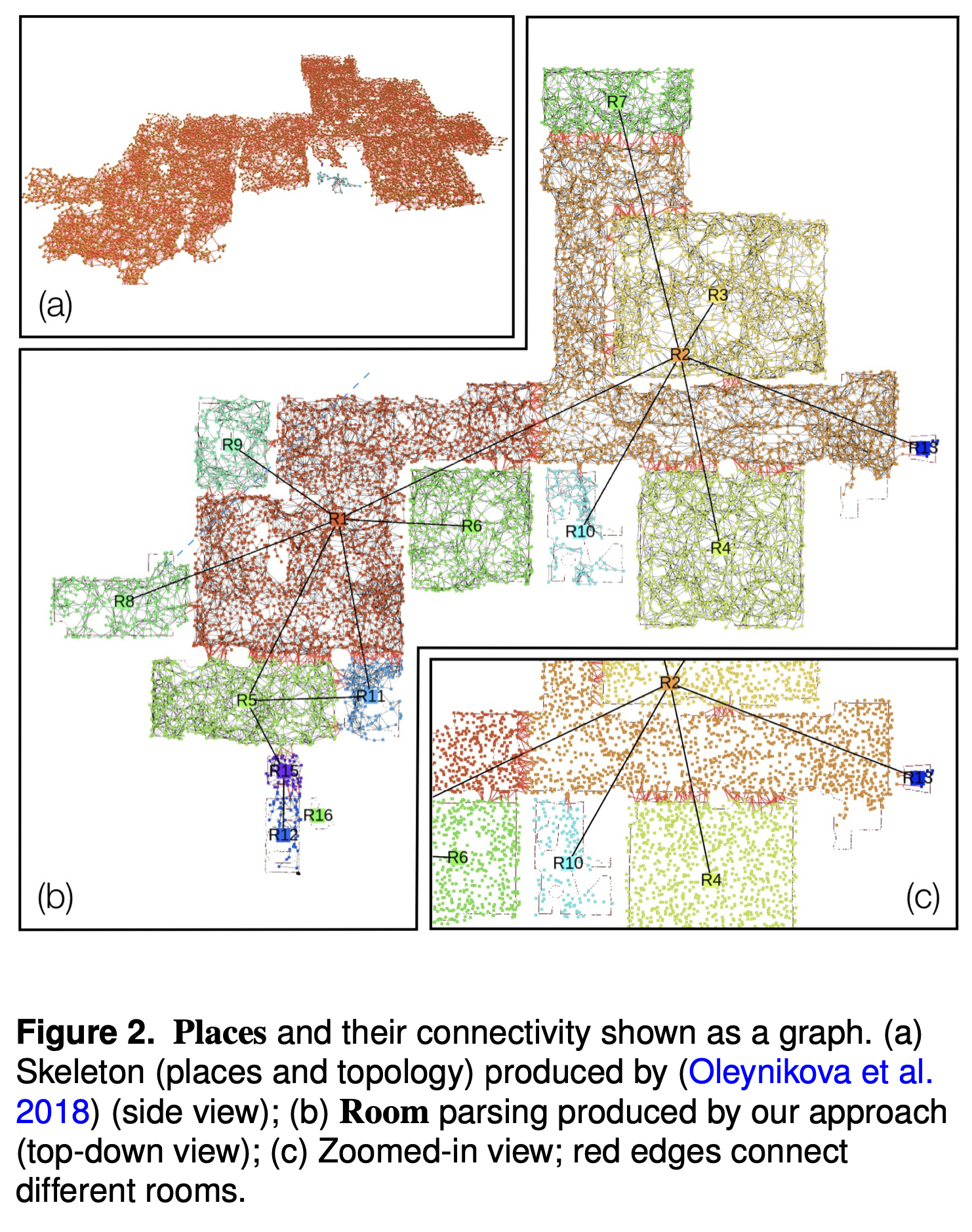
- 장소와 그 연결성을 그래프로 나타낸 것.
- (a) (Oleynikova et al. 2018)이 생성한 스켈레톤(장소와 토폴로지) (측면도);
- (b) 우리 접근 방식으로 생성된 방 구문 분석 (상단 뷰);
- (c) 확대된 뷰; 빨간색 엣지는 서로 다른 방을 연결
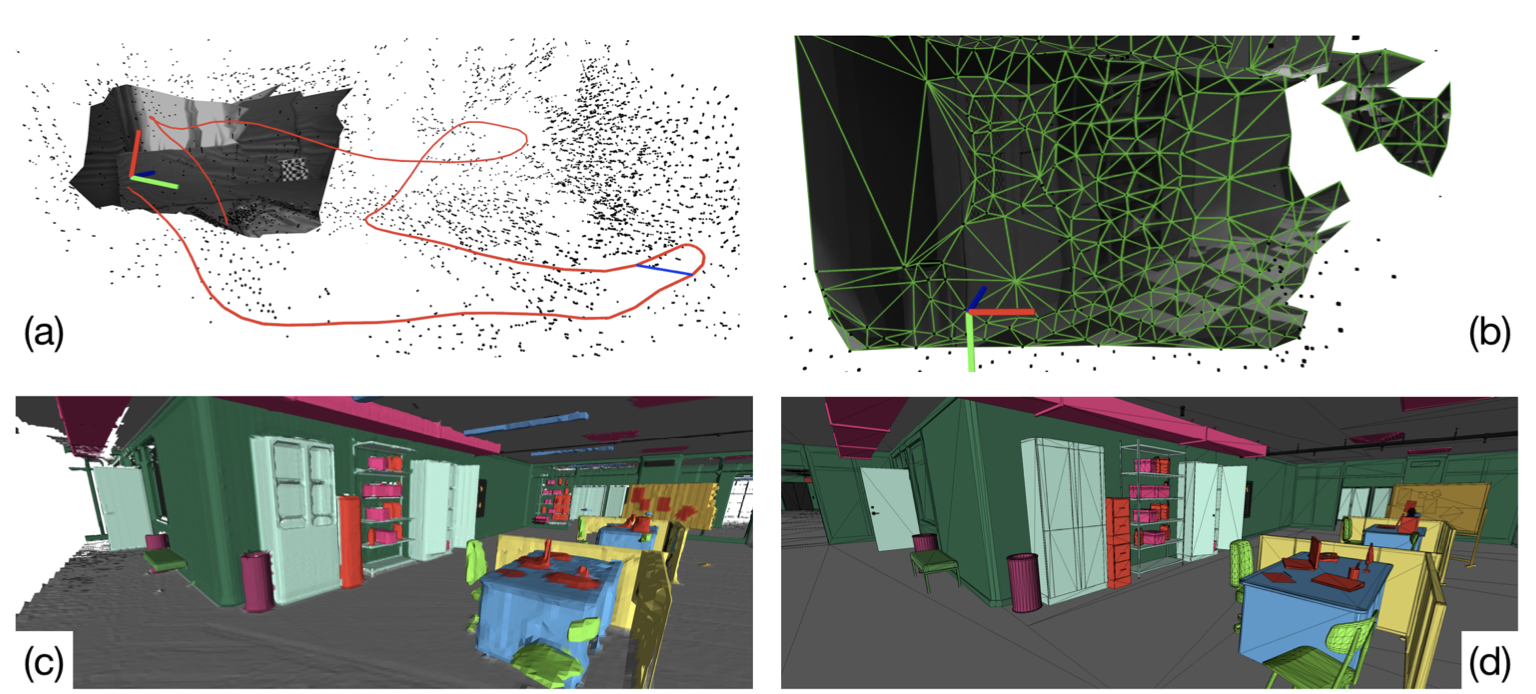
- Kimera-Core는 실시간 기하학-의미적 SLAM을 위한 오픈 소스 라이브러리
- 이 라이브러리는
- (a)
- IMU 속도로
visual-inertial 상태 추정(Kimera-VIO) 전역적으로 일관되고 외란에 강한 trajectory 추정(Kimera-RPGO)을 제공
- IMU 속도로
- (b)
low-latency local mesh of the scene를 계산 (Kimera-Mesher) - (c) semantically annotated 3D mesh(Kimera-Semantics) 를 구축
- global consistency을 위해 최적화될 수 있고, 실제 모델을 정확하게 반영 (Kimera-PGMO)
- (d) ground truth
- (a)
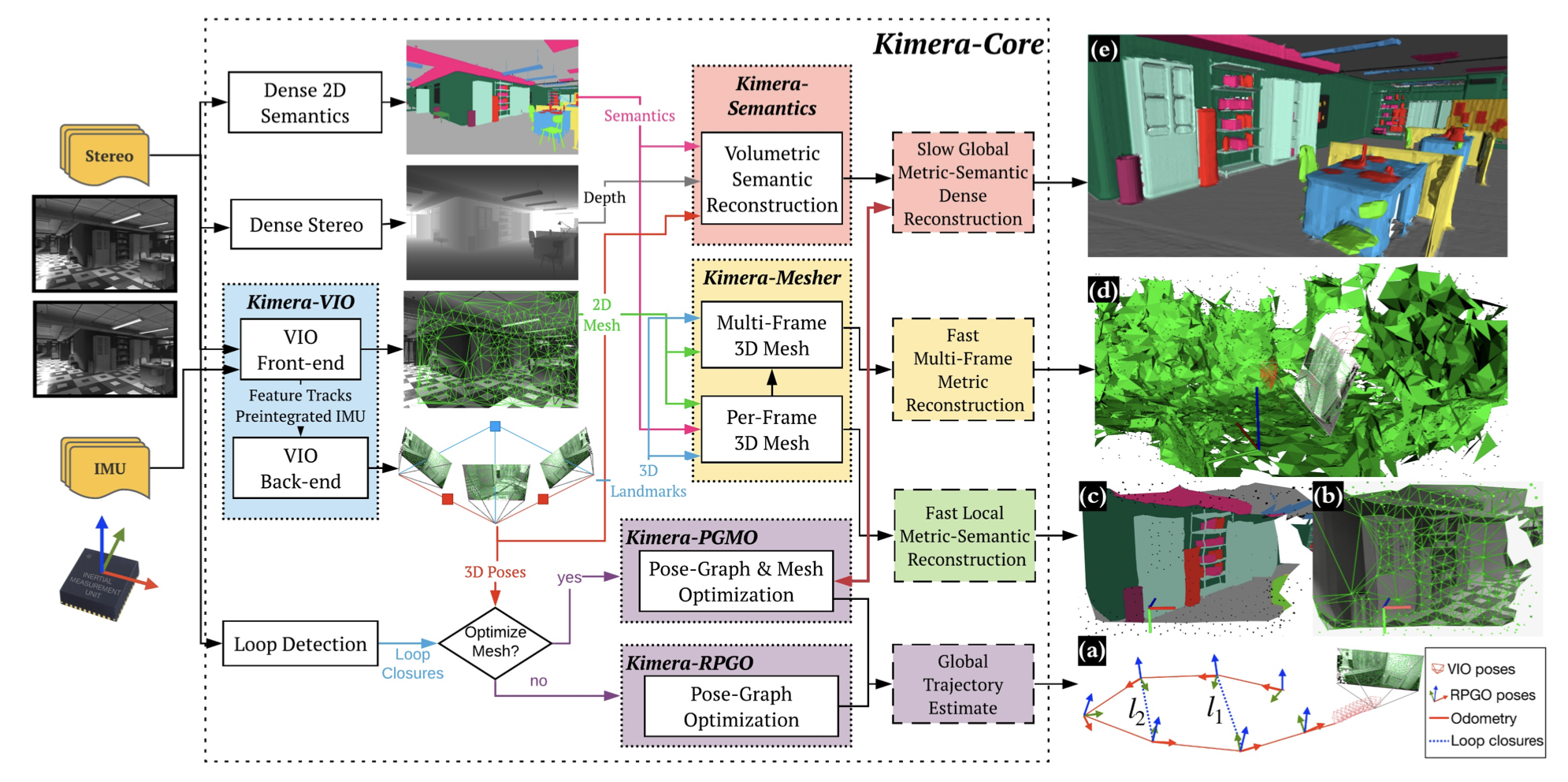
- Kimera-Core의 아키텍처.
- Kimera-Core는 스테레오 이미지(또는 RGB-D)와 IMU 데이터를 입력으로 사용하며(왼쪽에 표시),
- (a) 자세 추정과 (b-e) 여러 metric-semantic reconstruction을 출력
- Kimera-Core는 네 개의 주요 모듈로 구성됩니다:
- Kimera-VIO,
- IMU 속도로
visual-inertial 상태 추정
- IMU 속도로
- Kimera-PGMO(또는 Kimera-RPGO),
전역적으로 일관되고 외란에 강한 trajectory 추정
- Kimera-Mesher,
low-latency local mesh of the scene
- Kimera-Semantics.
- semantically annotated 3D mesh
- Kimera-VIO,
Kimera-VIO 모듈 상세 설명
- Kimera-VIO 모듈은 시각-관성 오도메트리(Visual-Inertial Odometry)를 위한 시스템
- 이 모듈은 IMU와
스테레오 이미지 데이터를 입력으로 받아,로봇의 위치와 자세를 추정
- 이 모듈은 IMU와
입력 (Input)
- 스테레오 이미지 (Stereo Images): 두 개의 카메라로 촬영된 이미지 쌍으로, 환경의 깊이 정보를 제공하여 3D 공간에서 물체의 위치를 파악하는 데 사용됩니다.
- IMU 데이터 (IMU Data):
가속도계와 자이로스코프에서 측정된 관성 데이터로,로봇의 가속도와 각속도를 제공
구성 요소
-
VIO Front-end
- 기능:
- 이미지 피처(feature)를 추출하고 추적하는 역할
- 이미지 피처는 이미지에서 식별 가능한 지점(코너, 엣지 등)
- 연속된 프레임에서 동일한 지점을 추적하여 움직임을 파악
- 출력:
- 피처 트랙(feature tracks)으로, 이는 이미지 시퀀스에서 추적된 특징점의 궤적
- 2D Mesh
- VIO Front-end에서 추출한 피처와 그들의 상대적인 위치 관계를 바탕으로 생성된 2차원 메쉬
- 이 메쉬는 각 프레임에서의 피처 포인트들을 연결하여, 로컬 환경의 기하학적 구조를 나타냄
- 주로 피처 포인트 간의 관계를 시각적으로 보여주기 위해 사용되며,
- 3D 메쉬를 구성하기 위한 초기 단계로 볼 수 있음
- 연결 관계:
- VIO Front-end는 추출한 피처 포인트를 사용하여 2D Mesh를 생성하며,
- 이는 이후 단계에서 보다 정교한 3D 메쉬로 확장
- 기능:
-
Feature Tracks Preintegrated IMU
- 기능:
- VIO Front-end에서 생성된 피처 트랙과 IMU 데이터를 결합하여 사전 통합(preintegration)된 데이터를 생성
- 이 과정에서는
IMU 데이터를 시간에 따라 통합하여,상대적인 위치 변화와 자세 변화를 계산
- 출력: 피처 트랙과 사전 통합된 IMU 데이터를 포함한 결합 정보.
- 기능:
-
VIO Back-end
- 기능:
- VIO Front-end와 Preintegrated IMU에서 제공된 데이터를 사용하여 최종적인 위치와 자세를 추정
- 이 과정은 주로 비주얼-관성 데이터를 결합하여 전역적으로 일관된 경로를 계산하는 것을 포함
- 이 단계에서는 피처 트랙과 IMU 데이터를 통합하여 최적화된 경로를 계산하고,
- 정확한 포즈(pose) 추정을 수행
- 출력:
로봇 또는 장치의 3D 포즈(위치 및 자세) 추정 값.- 3D Landmarks
- VIO Back-end에서 추정된 3차원 공간상의 특정 지점들
- 이러한 랜드마크는 로컬 및 전역 좌표계에서 중요한 참조 지점으로 사용
- 로봇이 환경 내에서 자신의 위치를 파악하는 데 도움을 줌
- 랜드마크는 주로 환경의 고유한 특징점
- 다른 위치 추정 및 매핑 알고리즘에서 일관되게 식별될 수 있는 지점을 의미
- 기능:
Loop Detection, Loop Closures, Optimize Mesh? 및 Kimera-PGMO의 작동 원리
전체 작동 과정 요약
- Loop Detection:
현재 위치가 이전에 방문한 장소와 일치하는지 감지(stereo image을 이용)
- Loop Closures:
감지된 loop를 사용하여,로봇의 경로와 지도를 최적화
- Optimize Mesh?:
- Loop Closure 과정에서의 변경 사항을 바탕으로, 3D 메쉬의 최적화 필요성을 판단.
- Kimera-PGMO:
- 포즈 그래프와 3D 메쉬를 동시에 최적화하여 전체 시스템의 일관성과 정확성을 보장
1. Loop Detection
- 기능:
- Loop Detection은 로봇이나 장치가 이전에 방문한 위치로 다시 돌아왔을 때 이를 인식하는 과정
- 이는 위치 추정 및 지도의 정확성을 높이는 데 중요한 역할
- 작동 방식:
- Loop Detection은 주로 현재 관찰된 특징점(feature points)이나 위치와 이전에 관찰된 것들을 비교하여 유사성을 찾음
- 만약 현재 위치와 이전 위치 간의 유사성이 높다면, 이를 loop로 인식
- 입력 및 출력:
- 현재 프레임에서 추출된 특징점 데이터와 이전 프레임의 특징점 데이터를 비교하여 loop를 감지
- 감지된 loop 정보는 이후의 최적화 과정에서 사용됩니다.
2. Loop Closures
- 기능:
- Loop Closure는
감지된 loop를 이용하여 전체 경로와 지도를 최적화하는 과정 - 이는 누적된 위치 추정 오차를 줄이고, 전체 시스템의 정확성을 높이는 데 도움을 줌
- Loop Closure는
- 작동 방식:
- Loop Closure는 감지된 loop를 기반으로, 로봇의 경로와 지도의 일관성을 보장하기 위해 최적화 알고리즘을 실행
- 이 과정에서는 일반적으로 그래프 최적화 기법이 사용
- 입력 및 출력:
- Loop Detection에서 감지된 loop 정보를 입력으로 받아,
- 경로와 지도를 최적화하여 출력
3. Optimize Mesh?
- 기능:
- 이 단계는 loop closure 정보를 이용하여
3D 메쉬를 최적화할 필요가 있는지여부를 결정
- 이 단계는 loop closure 정보를 이용하여
- 작동 방식:
- Loop Closure 과정에서 경로가 수정되면, 이에 따라 메쉬 또한 수정되어야 할 필요가 있습니다.
- 이 단계에서는 이러한 필요성을 판단
- 입력 및 출력:
- Loop Closure 과정에서의 변경 사항을 입력으로 받아,
메쉬 최적화 여부를 결정 - 최적화가 필요하다고 판단되면, Kimera-PGMO로 데이터를 전달
- Loop Closure 과정에서의 변경 사항을 입력으로 받아,
4. Kimera-PGMO (Pose-Graph & Mesh Optimization)
- 기능:
- Kimera-PGMO는
포즈 그래프와 메쉬를 함께 최적화하는 모듈 - 이는
로봇의 위치 추정과3D 메쉬의 일관성을 보장
- Kimera-PGMO는
- 작동 방식:
- Kimera-PGMO: 포즈 그래프 최적화와 메쉬 최적화를 동시에 수행
- 포즈 그래프 최적화:
- 로봇의 위치와 자세를 조정하여 전체 경로의 일관성을 높임
- 로봇의 위치와 자세 데이터를 그래프 구조로 표현하고,
- 그래프 최적화 알고리즘을 사용하여 위치 오차를 최소화
- 메쉬 최적화:
- 이 조정된 포즈를 반영하여 3D 메쉬를 수정
- 최적화된 포즈 데이터를 반영하여 3D 메쉬의 기하학적 일관성을 유지하고,
- 세밀한 부분까지 정확하게 재구성
- 이 조정된 포즈를 반영하여 3D 메쉬를 수정
- 포즈 그래프 최적화:
- Kimera-PGMO: 포즈 그래프 최적화와 메쉬 최적화를 동시에 수행
- 입력 및 출력:
- Loop Closure에서 제공된 포즈 수정 정보를 입력으로 받아,
- 포즈 그래프와 3D 메쉬를 최적화한 후,
- 최적화된 메쉬와 포즈 데이터를 출력
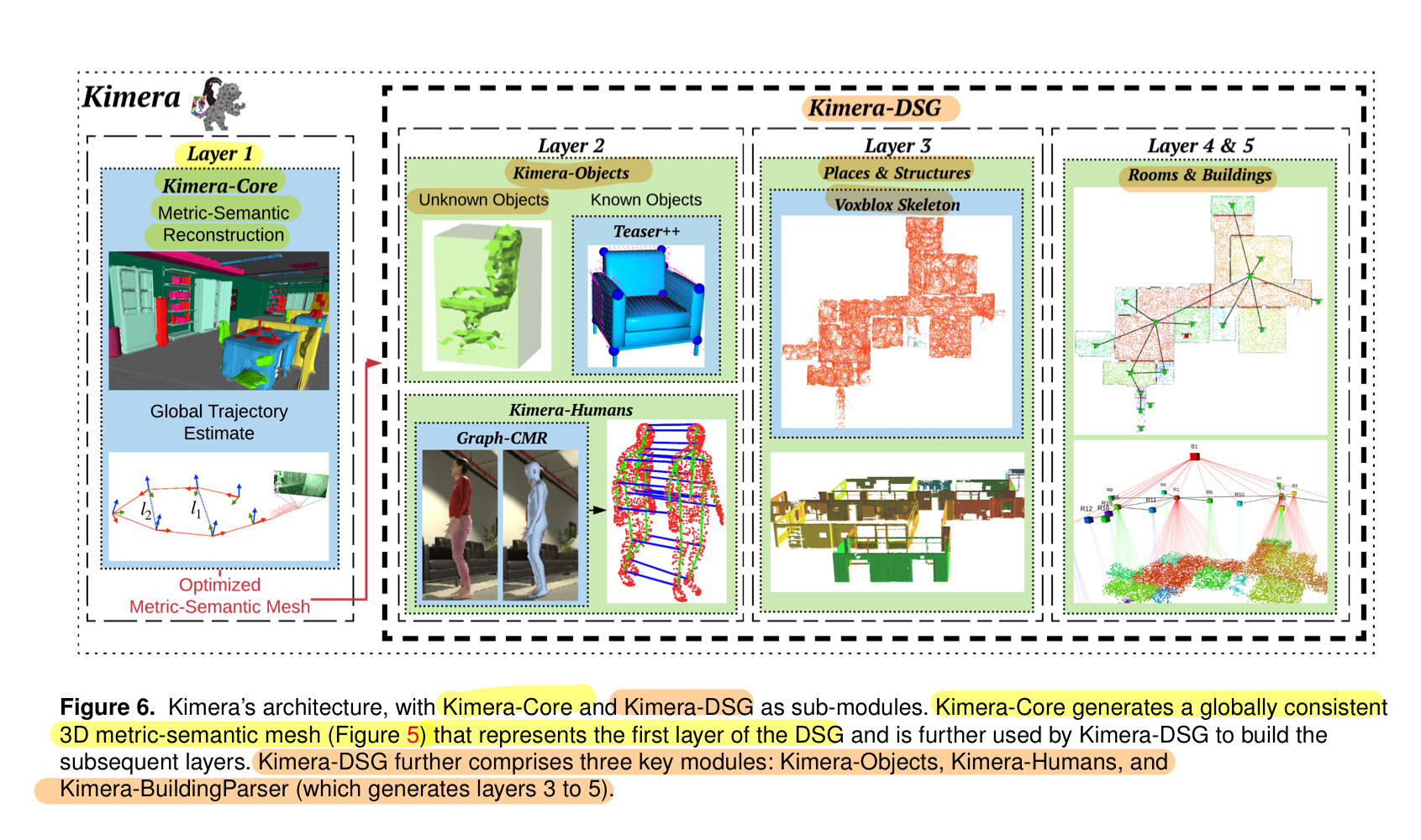
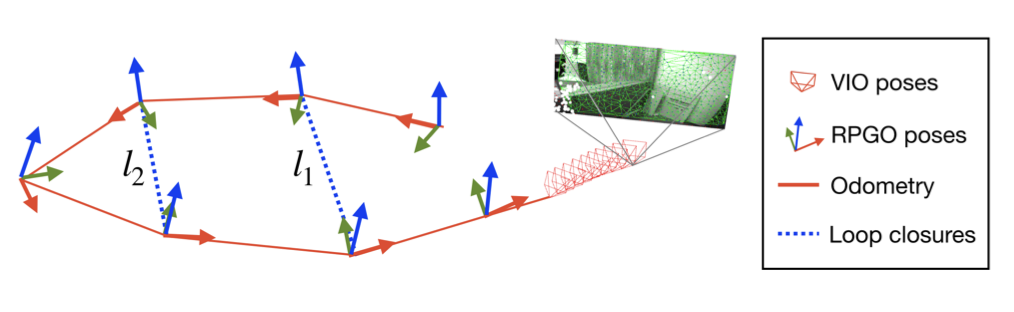
Figure 7: Kimera-RPGO의 역할과 작동 원리
- Figure 7은 Kimera-RPGO 모듈의 기능과 작동 방식을 설명하는 그림
- Pose-Graph Optimization
- 이 모듈은 주로
루프 클로저(loop closures)를 감지하고전역적으로 일관된 경로를 추정하는 역할 - Kimera-PGMO와는 달리, Kimera-RPGO는 3D 메쉬를 최적화하지 않음
그림 설명
-
VIO poses:
- 기호: 빨간색 삼각형으로 표시.
- 의미:
- VIO(Visual-Inertial Odometry)에서 추정된 로봇의 위치와 자세(pose)를 나타냄
- 이는 시각 및 관성 데이터를 사용하여 연속된 프레임 간의 위치 변화를 계산한 결과
-
RPGO poses:
- 기호: 파란색 화살표로 표시.
- 의미:
- Kimera-RPGO(Pose-Graph Optimization)에서 최적화된 포즈를 나타냄
- 이는 루프 클로저 정보를 반영하여 VIO 포즈의 누적된 오류를 수정한 결과
-
Odometry:
- 기호: 빨간색 선으로 표시.
- 의미:
- VIO에서 추정된 연속된 위치 변화를 연결한 경로
- 이는 로봇이 이동한 궤적을 나타냅니다.
-
Loop closures:
- 기호: 파란색 점선으로 표시.
- 의미:
- 루프 클로저는 로봇이 이전에 방문했던 위치로 다시 돌아왔을 때를 나타냅니다.
- 루프 클로저는 경로의 누적 오차를 줄이기 위해 중요한 정보입니다.
Kimera-RPGO의 기능
-
Visual Loop Closures Detection:
- 기능: Kimera-RPGO는 시각 정보를 사용하여 루프 클로저를 감지합니다.
- 이는 현재 관찰된 장면과 이전에 관찰된 장면 간의 유사성을 비교하여 이루어짐
- 중요성:
- 루프 클로저를 감지함으로써, 로봇은 현재 위치와 과거 위치 간의 관계를 인식할 수 있습니다.
- 이는 전체 경로의 정확성을 높이는 데 매우 중요합니다.
- 기능: Kimera-RPGO는 시각 정보를 사용하여 루프 클로저를 감지합니다.
-
Rejection of Spurious Loop Closures:
- 기능:
- Kimera-RPGO는 잘못된 루프 클로저를 걸러냄
- 잘못된 루프 클로저는 로봇의 경로를 왜곡시킬 수 있기 때문에, 이를 정확하게 필터링하는 것이 중요
- 중요성:
- 잘못된 루프 클로저를 제거함으로써, 경로 최적화의 정확성을 보장할 수 있음
- 기능:
-
Estimation of Globally Consistent Trajectory:
- 기능: Kimera-RPGO는 감지된 루프 클로저 정보를 사용하여 전역적으로 일관된 경로를 추정합니다. 이는 그래프 최적화 알고리즘을 통해 이루어짐
0. Abstract
- 인간은 자신이 움직이는 환경에 대한 복잡한 정신 모델을 형성할 수 있습니다.
- 이 정신 모델은 장면의 기하학적 및 의미적 측면을 포착하며,
- 여러 수준의 추상화 (예: 물체, 방, 건물)에서 환경을 설명하고,
- 정적 및 동적 엔티티와 그 관계 (예: 사람이 특정 시간에 방 안에 있음)를 포함
- 이에 반해, 현재 로봇의 내부 표현은 환경에 대한 부분적이고 단편적인 이해를 제공하는데,
- 이는 희소 또는 밀집된 기하학적 원시 형식(예: 점, 선, 평면, 보젤)이나
- 객체의 집합 형태로 제공됨
- 이 논문은 3D Dynamic Scene Graphs(DSG)라는 새로운 표현 방식을 도입하여 로봇과 인간의 인식 차이를 줄이고자 합니다.
- DSG는 계층화된 그래프로,
- 노드는 다양한 추상화 수준에서 공간 개념을 나타내고,
- 엣지:
노드 간의 시공간 관계를 나타냄
- DSG는 계층화된 그래프로,
- 두 번째 기여는 Kimera라는 최초의
- 완전 자동 방식으로 visual-inertial data를 통해 DSG를 구축하는 방법을 제시하는 것
- Kimera는 아래들을 위한 정확한 알고리즘을 포함
visual-inertial SLAM,metric-semantic 3D reconstruction,object localization,human pose and shape estimation,scene parsing
- 세 번째 기여: 실생활 데이터셋과 사진 현실적 시뮬레이션에서 Kimera의 포괄적인 평가
- 혼잡한 실내 및 실외 장면을 시뮬레이션하는 새로운 데이터셋인 uHumans2도 포함
- 평가 결과, Kimera는
- visual-inertial SLAM에서 경쟁력 있는 성능을 보임
- 실시간으로 정확한 3D metric-semantic 메쉬 모델을 추정
- 수십 개의 객체와 인간이 있는 복잡한 실내 환경의 DSG를 몇 분 내에 구축
- 마지막 기여:
real-time hierarchical semantic path-planning을 위해 DSG를 사용하는 방법을 시연하는 것 - Kimera의 핵심 모듈은 오픈 소스로 공개되었습니다.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.