bshc.log
로그인
bshc.log
로그인
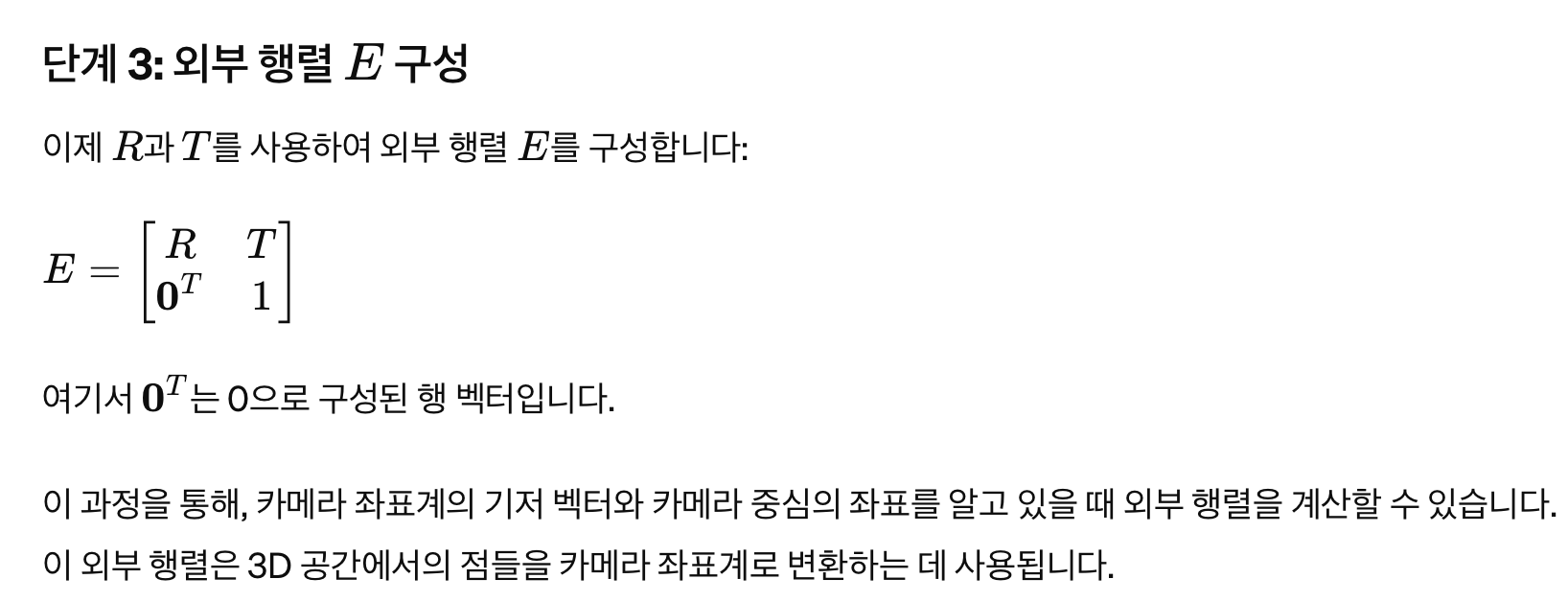
Extrinsic Matrix
About_work
·
2024년 3월 17일
팔로우
0
camera
목록 보기
2/2
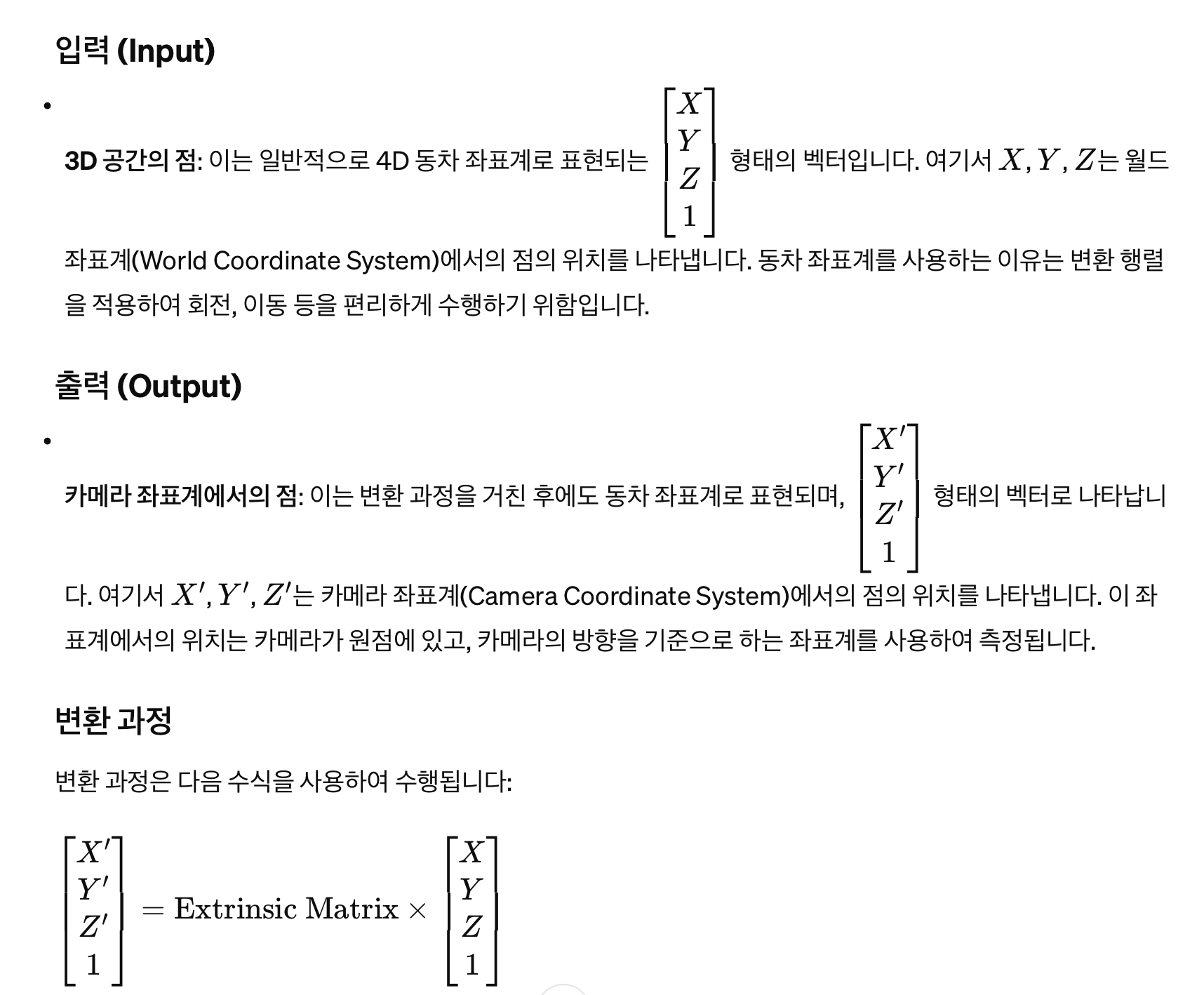
world 좌표계 -> 카메라 좌표계
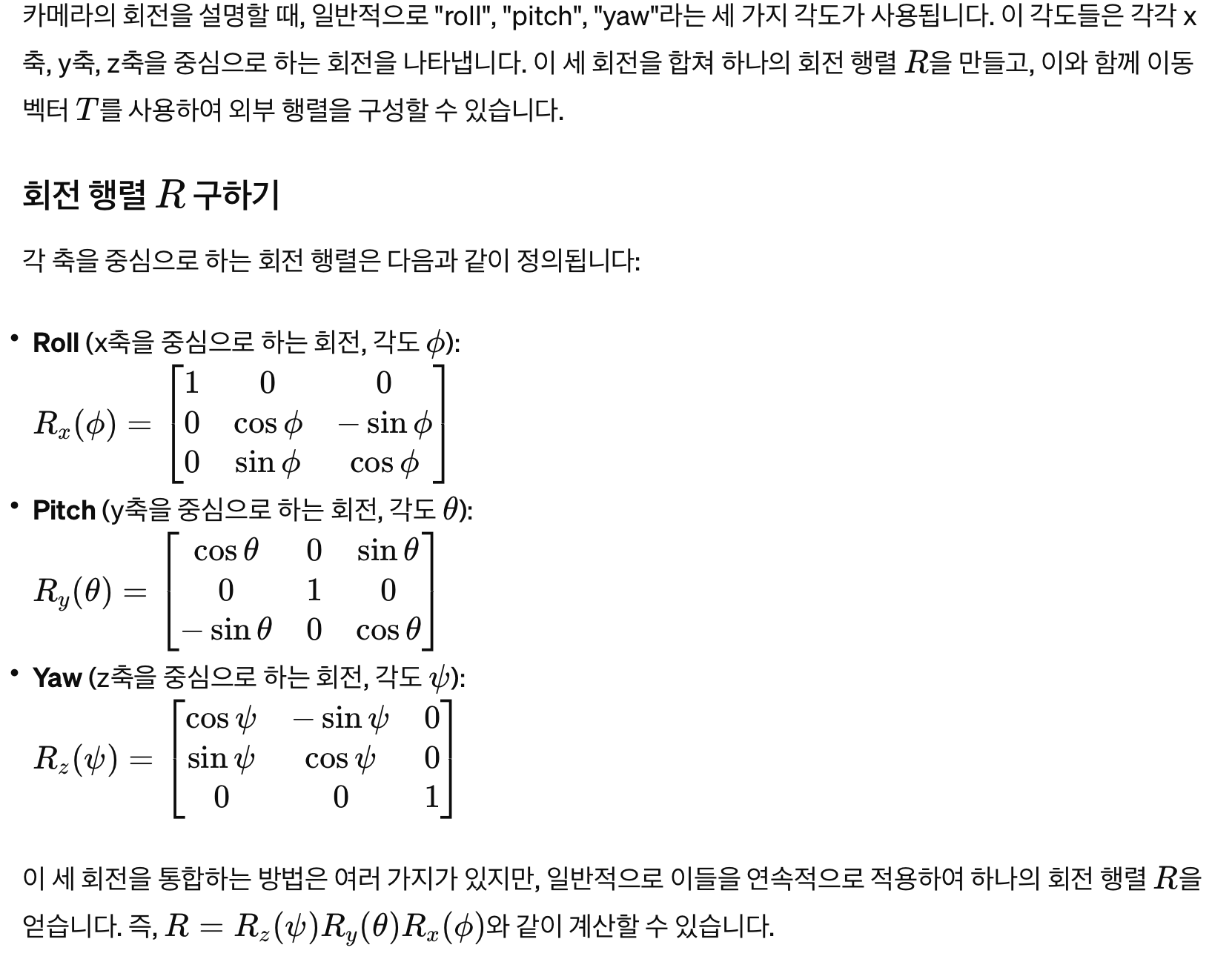
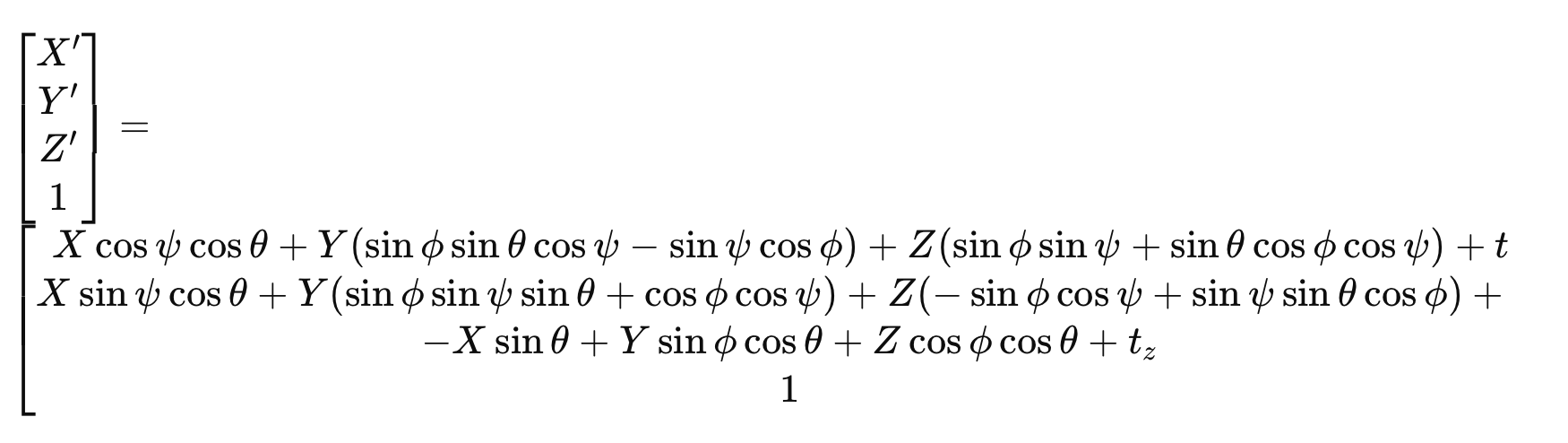
1. x, y, z, roll, pitch, yaw로 구하기
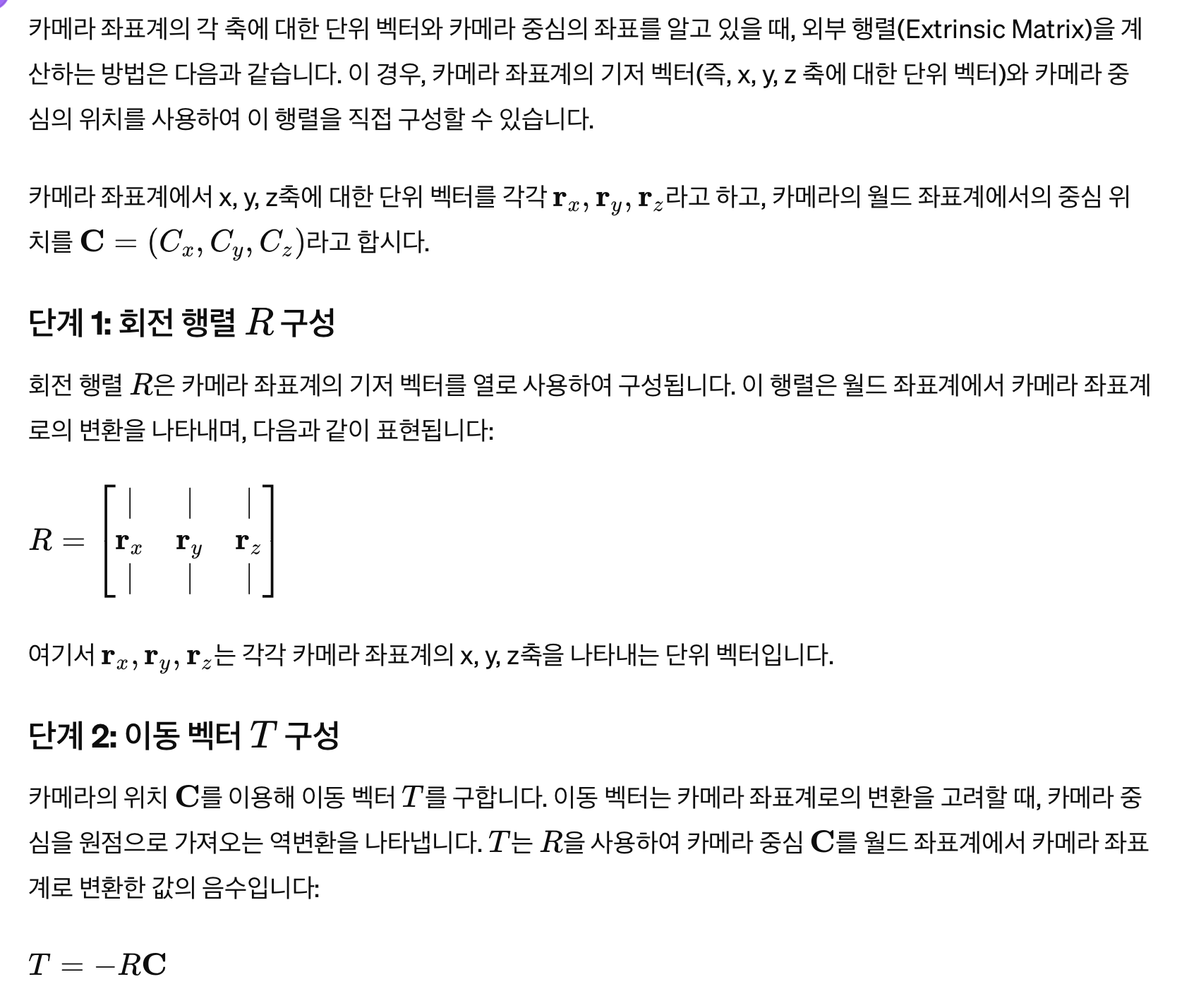
2. 각 회전축의 unit vector + 카메라의 (x,y,z)위치로부터 구하기
About_work
새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.
팔로우
이전 포스트
z16 / bgr8
0개의 댓글
댓글 작성