- DWA(Dynamic Window Approach) 컨트롤러는 주로 자율 이동 로봇의 경로 계획과 충돌 회피에 사용되는 알고리즘
- 이 알고리즘은 로봇이 현재 상태에서 달성할 수 있는 속도와 회전율의 조합, 즉
동적 창(Dynamic Window)내에서 최적의 이동 경로를 실시간으로 선택하도록 설계 - DWA는 로봇의 현재 위치와 목표 위치 사이의 최적 경로를 계산함으로써, 장애물을 피하면서 목표 위치에 도달할 수 있는 경로를 동적으로 계획
DWA 알고리즘의 주요 단계:
- 속도와 회전율의 가능한 조합 계산:
- 로봇의 현재 속도와 가속도 한계를 고려하여 가능한 모든 속도(선속도)와 회전율(각속도)의 조합을 계산
- 이 조합들은 로봇이 달성할 수 있는 다양한 이동 상태를 나타냄
- 동적 창 결정:
- 로봇의
동적 제약조건(예: 최대 속도 및 가속도, 회전율)과환경 제약조건(예: 장애물의 위치)을 고려하여, 현재 시점에서 로봇이 이동할 수 있는 '동적 창'을 결정 - 이 창은 가능한 속도와 회전율 조합의 집합으로 정의됩니다.
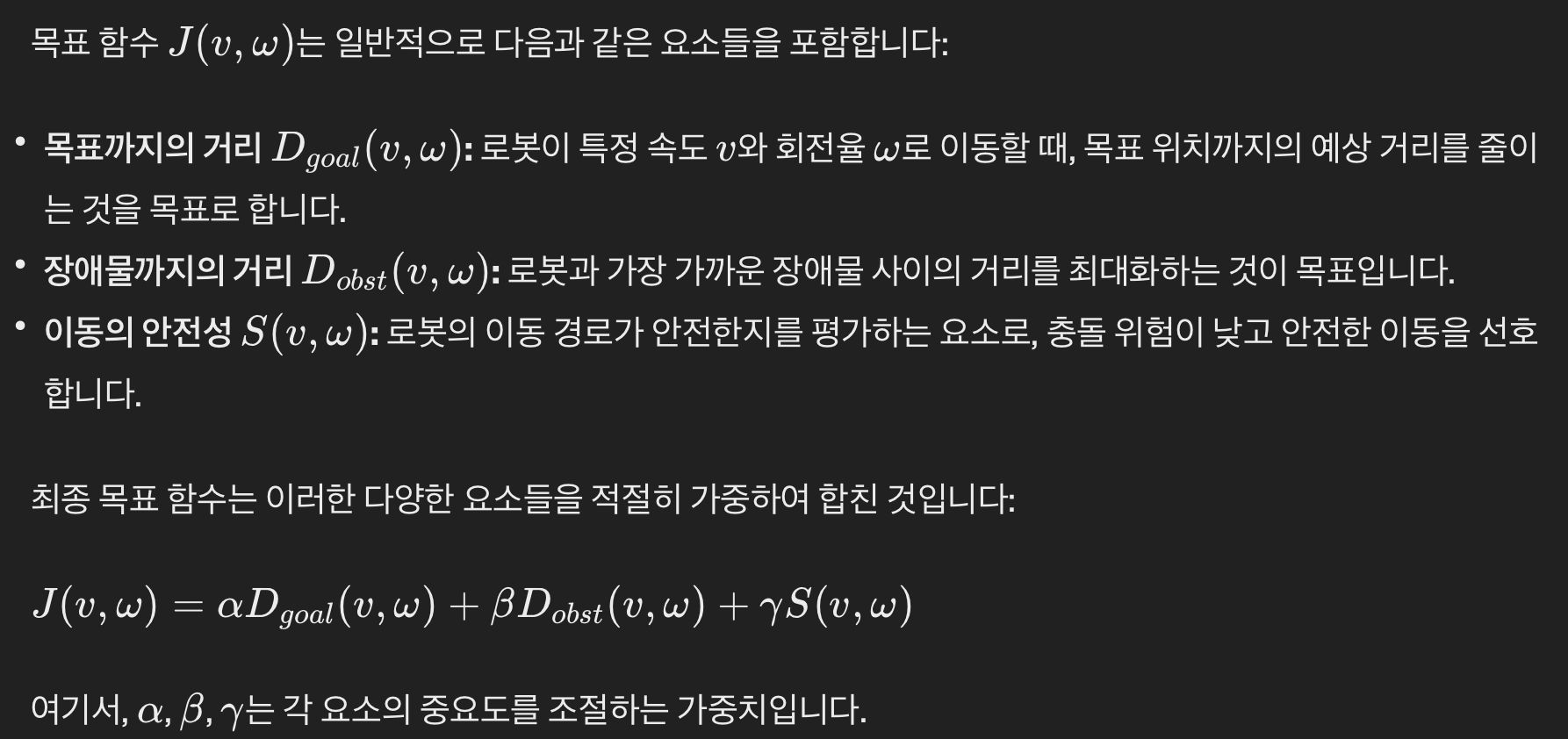
- 목표 함수 평가:
- 각 속도와 회전율 조합에 대해 목표 함수를 계산하여 평가
- 목표 함수는 보통 아래의 것들을 을 고려하여 정의
로봇의 목표 위치까지의 거리장애물까지의 거리이동 경로의 안전성등
- 이 함수는 로봇이 목표에 도달하는 데 있어, 최적의 조합을 선택하는 데 사용
- 최적의 속도와 회전율 선택:
- 계산된 목표 함수를 최대화(또는 최소화)하는 속도와 회전율의 조합을 선택
- 이 조합은 로봇이 다음 시간 단계에서 취할 최적의 이동 방향과 속도를 결정
수학적 설명:

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.