by 한양대 최준원 교수님
자율주행 자동차 인지 기술(심화)
[자율주행 통합 인지시스템 심화]
자율주행 통합 인지시스템 구성
- 센서 : 카메라, 레이더, 라이다, 초음파
- 차량 네트워크 : 센서데이터를 자율주행 컴퓨터로 가져오기 위한 통신 링크
- 자율주행 컴퓨터 : 범용 계산을 위한 CPU, GPU, 고속 뉴럴네트워크 계산을 위한 가속시
- 인지 소프트웨어 : 주변 환경 인지 수행을 위한 알고리즘
자율주행 통합 인지 기능
- 센서 데이터의 전처리 및 동기화
- 동적 객체 검출
- 동적 객체 추적
- 동적 객체의 의도 및 미래 위치 예측(움직임 분석)
- 주행 관련 정적 객체 검출 -> 맵매칭 기반 측위에 활용
- 차선, 도로 등의 영역 검출 -> 맵매칭 기반 측위에 활용
- 전방 영역 또는 장애물 등의 거리 지도 생성
센서별 인지 기술
-
카메라 기반의 인지 기술
-주로 CNN 등의 딥러닝 모델을 카메라 영상에 적용 -> 동적 객체와 정적 객체 검출, 추적
-기존에는 물체의 크기나 범퍼 등의 정보를 이용하여 물체의 거리 측정 -
최근에는 카메라 영상 기반 거리 추정(딥러닝 기술 적용, 스테레오 카메라 사용)
-
카메라 영상으로부터 차선, 도로, 인도 등의 영역 검출
-
객체의 움직임을 분석하여 주변 차량 또는 보행자의 경로 예측
-
레이더 기반의 인지 기술
-수신된 전자기 신호 분석 -> 조감도 영역에서 동적 객체의 위치와 속도 측정
-물체의 움직임 추적 및 물체 ID 부여
-검출 알고리즘은 물체와 클러터에 의한 허상을 구분할 수 있어야함 -
라이다 기반의 인지 기술
-포인트 클라우드 데이터를 취득하여 분석 -> 3차원 영역에서 동적 객체의 위치 검출, 추적
-고해상도 라이다의 경우 : 동적 객체의 정확한 종류, 거리 정보 등을 얻을 수 있음, 전방 영역 또는 장애물까지의 거리를 정확히 추정해 낼 수 있음 -
센서들은 다 장단점이 있기 때문에 센서 융합 필요
-
복합 센서로부터 얻은 정보 융합 후 강인하고 신뢰성 높은 인지 기능 수행 가능
[자율주행 인지를 위한 AI 기술 심화]
AI 기술의 발전
- 딥러닝 : 딥뉴럴 네트워크, 계층이 여러개인 인공신경망
- 역사
-1960~1990 : 활발한 연구 진행, 뉴럴네트워크 이론척 기초 확립, 하드웨어 성능이 따라주지 못함
-1990~2010 : 인공지능의 암흑기, 뉴럴네트워크 모델이 실용적이지 않다고 생각한 연구자들, 연구자들의 관심이 뉴럴네트워크 모델에서 Support Vector Machine이나 커널 방법으로 이동
-2008 : 토론토 대학 Geoffrey Hinton 교수의 논문 발표(딥뉴럴네트워크의 학습 가능)
-2012 : 이미지넷 챌린지(1000개 종류의 영상 분류 경진 대회)에서 알렉스넷(AlexNet)이라고 불리는 딥뉴럴 네트워크 구조가 압도적 1등 차지함 -> 딥러닝 기술 주목받음, GPU 발전, 빅데이터 기술 발전
-2012~현재 : 인공지능 분야의 전성기, 알파고, GAN, GPT3 등 뛰어난 딥러닝 모델들 나옴, 눈부신 발전, 다양한 분야에 딥러닝 기술 적용되고 있음
자율주행 인지를 위한 딥러닝
-
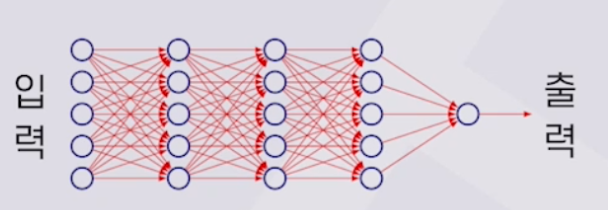
딥러닝 구조 : 하나 이상의 계층으로 이루어진 인공신경망 모델(뉴럴네트워크)
-복잡한 관계를 모델링 하기 위한 구조 필요
-복잡한 입력과 출력과의 관계를 근사화하기 위한 모델
-딥러닝 구조에서 계층 사이에 곱해지는 계수들이 딥러닝 구조를 결정함
-
딥러닝 학습 과정 : 트레이닝, 인퍼런스
-
트레이닝 : 정답을 달아놓은(라벨링) 트레이닝 데이터를 사용하여 모델 훈련
-
인퍼런스 : 트레이닝이 끝나면 자율주행차에 탑재하여 실제 인지 기능 수행
-
센서 데이터를 처리하기 위한 기본적인 딥러닝 모델
-CNN(Convolutional Neural Network) : 2차원 영상데이터로부터 유용한 특징값을 뽑아내기 위한 뉴럴네트워크 구조, 물체 검출, 영역 검출, 거리 추정에 사용
-RNN(Recurrent Neural Network) : 시간적인 시계열 데이터로부터 유용한 특징값을 뽑아내기 위한 뉴럴네트워크 구조, LSTM 모델이 유명, 동적 객체의 움직임 예측에 사용
-PointNet(포인트넷) : 순서가 없는 점의 집합으로 되어 있는 데이터로부터 유용한 특징값을 뽑아내기 위한 뉴럴네트워크 구조, 라이다 데이터로부터 물체 검출에 사용 -
기본적인 딥러닝 이용시
-센서 데이터로부터 특징값 추출 -> 검출, 영역 분할, 거리 추정 등의 복잡한 작업 수행
-자율주행에서는 센서 데이터의 차수가 높고 아주 복잡한 작업을 수행해야함 -> 규모가 큰 딥러닝 모델 사용해야함
-> 트레이닝하기 위한 대용량의 학습 데이터 구축 필요
[자율주행 대규모 인지 데이터 관리 기술]
자율주행 대규모 인지 데이터 관리 기술 개요
- 자율주행 인지를 위한 딥러닝 모델을 학습시키기 위해 엄청난 양의 트레이닝 데이터 필요
- 머신러닝 기술의 성능 : 학습 데이터가 많을수록 -> 머신러닝 성능 향상
- 일회성의 데이터 수집으로 학습한 모델로는 다양한 상황에 대해 대처 불가능
- 지속적이고 안정적인 모델을 위해서는? 반복적인 데이터 관리 프로세스를 수행하는 플랫폼 필요
대규모 인지 데이터 관리 기술 소개
-
자율주행 데이터 수집
-데이터 취득을 위한 전용 차량을 통한 학습 데이터 수집
-실제 자율주행차에서 수집된 데이터를 클라우드로 전송
-인프라, 엣지 등에 센서를 장착하여 데이터 취득 -
데이터 선별 및 검증
-데이터의 라벨링 과정에 많은 비용과 노력 소요
-현재 학습된 모델을 향상시키는데 도움이 되는 데이터만 선별
-능동학습(Active Learning) : 불확실성이 큰 데이터만을 라벨링하여 적은 수의 데이터만으로 학습 성능을 극대화시키는 전략
-선별한 데이터 라벨링 수행 후 검증 과정 중요(이유 : 데이터의 질이 학습 성능에 큰 영향을 끼치기 때문) -
학습(트레이닝)
-대규모의 학습 데이터를 이용하여 자율주행 인지 모델을 트레이닝
-클라우드에서 전용 딥러닝 하드웨어 사용(많은 연산 필요) -> 오랜 계산시간 소모 -> 딥러닝 구조 선정 및 하이퍼파라미터 튜닝 -
검증 및 테스트
-테스트 데이터를 이용한 인지 기능 테스트
-실제 도로에서의 시나리오별 자율주행 기능 검증
-시뮬레이션을 통한 인지 성능 테스트
-실제 자율주행차에 추가적으로 탑재하여 섀도우 모드로 테스트 -
탑재
-검증이 된 자율주행 모델을 소프트웨어 OTA를 통해 차량에 탑재
-지속적으로 소프트웨어 관리 및 업데이트 수행 -
데이터 관리를 위한 플랫폼 구축
-클라우드를 중심으로 실시간으로 수집되는 대규모의 주행, 교통, 센서 데이터 관리
-증가하는 데이터의 규모를 다룰 수 있는 클라우드 서버 기술과 데이터베이스 확보
-라벨링에 의한 비용을 최대한 줄이는 솔루션 중요
-자율주행차와 클라우드가 정보를 주고받기 위한 통신 및 OTA 기술 중요
[카메라 캘리브레이션 심화]
카메라 캘리브레이션 개요
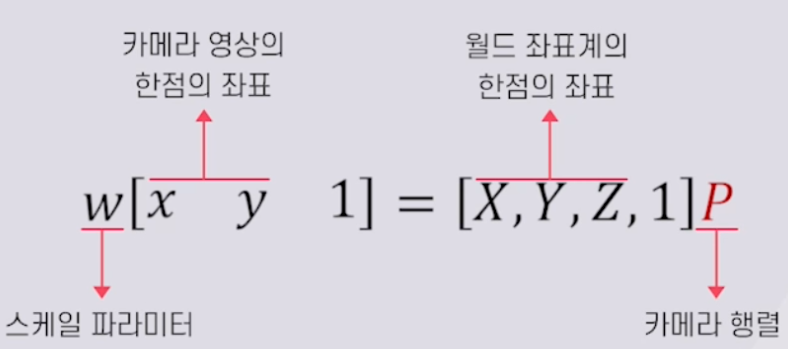
- 월드 좌표계의 3차원 점을 2차원 영상의 픽셀(카메라 영상의 픽셀)의 좌표로 변환하는 모델 필요
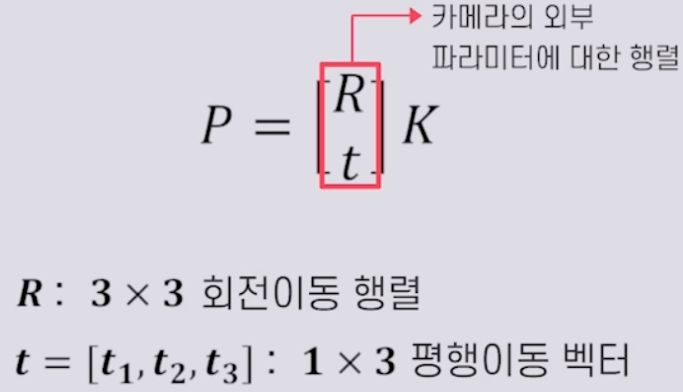
- 핀홀 카메라 행렬 모델(P)
- 실제 카메라의 캘리브레이션에서는 렌즈의 왜곡까지 고려해줘야함
- 카메라 내부 파라미터, 카메라 외부 파라미터
- 카메라 캘리브레이션 : 월드 좌표계의 3차원 점과 대응하는 영상의 2차원 픽셀로의 변환 행렬 모델을 찾는 과정
- 카메라 내부 파라미터
-카메라 자체의 셋업에 관련된 파라미터
-카메라 좌표계와 카메라 영상의 픽셀값과의 대응 설명
-카메라 내부 파라미터에 영향을 미치는 것 : 초점거리, 렌즈 왜곡, 영상 중심값, 이미지 센서(Aspect Ratio, Skew Factor) - 카메라 외부 파라미터
-3차원 카메라 좌표계를 3차원 월드 좌표계로 변환
-구성 : 회전 이동, 평행 이동 - 캘리브레이션 과정

카메라 캘리브레이션 과정

-> But, 이것은 이상적인 핀홀 카메라 행렬 모델에서의 과정
-실제 렌즈 카메라에서는 렌즈의 왜곡을 보정하기 위한 캘리브레이션 수행
-방사형, 접선형 렌즈 왜곡이 있음
- 서로 대응되는 3D 월드 좌표계와 2D 이미지 픽셀의 점들을 이용
- 체커보드와 같은 반복적인 패턴을 카메라로 여러장의 영상을 찍어 3D 월드 좌표계와 2D 이미지 픽셀의 대응점들을 찾아 수행
- 카메라 캘리브레이션 툴 사용 -> 영상에서 체커보드의 코너점 파악 -> 외부 파라미터와 내부 파라미터 계산
[카메라 기반 물체 검출 딥러닝 기술 심화]
카메라 기반 물체 검출 기술 개요
- 카메라 영상에서 단일, 혹은 다중의 물체의 종류와 위치를 추정하는 기술
- 물체의 위치는 물체를 포함하는 2차원 바운딩 박스로 표현
- CNN 사용 -> 카메라 영상으로부터 추상적인 특징 지도 추출
- CNN을 백본 네트워크(물체 검출을 위한 추상적인 특징을 네트워크로 사용)로 사용 -> 추상화된 특징 지도를 추출 -> 각 원소마다 앵커 박스(각 원소마다의 기준 박스) 이용 -> 상대 변위 추정, 물체 분류 수행
카메라 기반 물체 검출 딥러닝 기술
- 1차 검출기와 2차 검출기로 나뉨
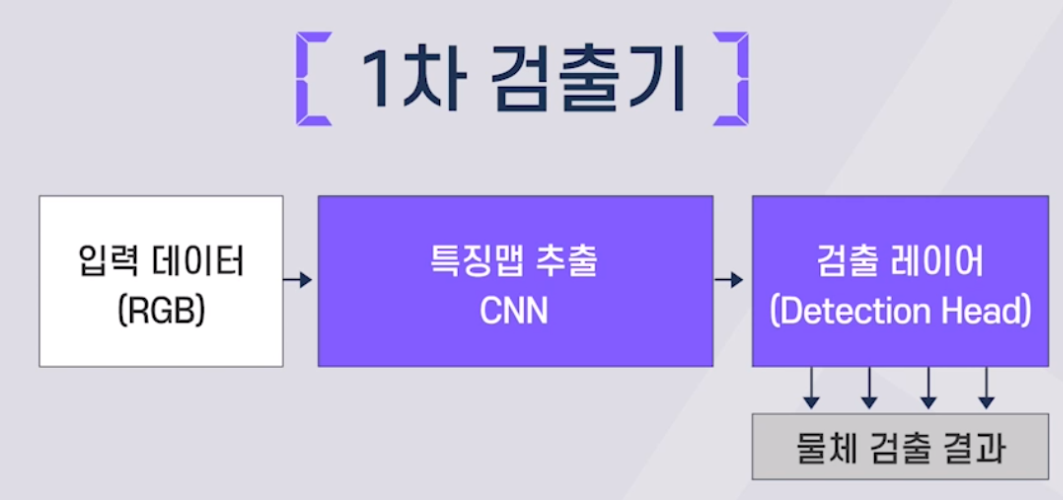
예>YOLO, SSD, RetinaNet
- RoI Pooling : 물체가 존재한다고 생각되는 영역의 특징값 추출
예>Faster RCNN, Mask R-CNN, Cascade R-CNN
카메라 기반 물체 검출 딥러닝 기술
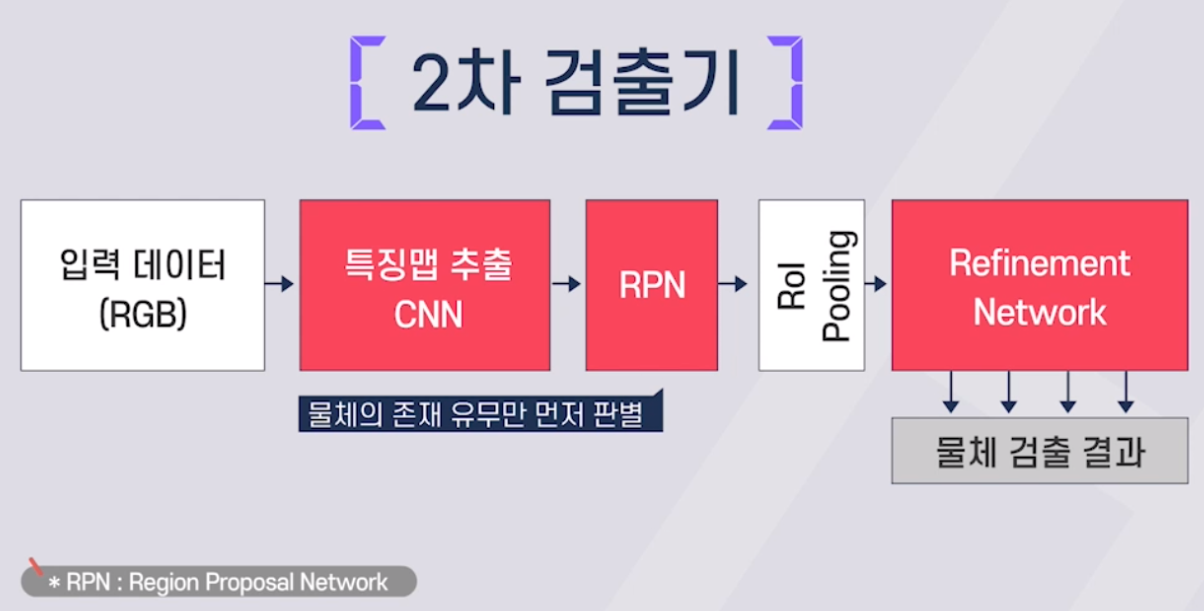
-2차 검출기 기술
- 백본 네트워크 : 카메라 영사에서 원하는 특징값 추출, VGGNet, ResNet 등의 CNN 모델 사용, ImageNet 데이터셋으로 미리 훈련된 가중치를 초기값으로 사용
- RPN(Region Proposal Network) : 백본 네트워크를 통해 나온 특징맵을 이용해 물체의 존재 유무와 위치 검출, 앵커 박스를 기준으로 하여 상대 변위 추정
- ROI Pooling : RPN에서 출력된 박스를 이용하여 백본 네트워크에서 얻은 특징 지도로부터 해당 영역의 특징값 추출
- Refinement Network : ROI Pooling을 통해 얻은 특징값을 이용해 물체의 정확한 종류 판별 및 위치 추정값 개선
물체 검출 딥러닝 모델의 트레이닝 과정
- 물체의 바운딩박스 라벨링이 되어 있는 트레이닝 데이터 이용
- 손실함수를 최소가 되도록 종단간(end-to-end) 학습 수행
- 손실함수의 지역적 최소값을 찾아가야 함(Back Propagation 이용)
- 데이터 Augmentation 기법 : 학습해야 하는 파라미터 수에 비해 데이터의 갯수가 모자랄 때, 트레이닝 데이터를 인공적으로 가공, 추가적인 데이터셋 생성(좌우대칭, 확대및축소, 밝기조절, 회전, 노이즈추가 등)
물체 검출기의 성능 평가
- 정답 박스와 출력 박스 사이에 겹치는 면적(IoU, intersection over union)을 기반으로 판별, 겹치는 면적 비율이 0.5 이상이면 정확하게 검출했다고 판단
- 물체검출기의 성능을 Mean Average Precision(mAP)를 기준으로 판별(Precision, Recall)
- Precision : 물체라고 한것중에서 몇개나 맞았는가의 비율
- Recall : 실제로 물체인것중에 몇개를 맞췄는가의 비율
- Precision과 Recall은 반대 관계, Precision-Recall 커브를 적분한 값이 mAP값
[카메라 기반 물체 추적 딥러닝 기술 심화]
카메라 기반 물체 추적 딥러닝 기술 개요
- 각 비디오 프레임에서 얻어진 물체 검출 결과를 추가적으로 처리하는 과정
- 각 프레임에서 얻은 검출 결과 연결(Association)
-서로 인접한 프레임의 검출 결과를 같은 물체에 대해 연결하여 시간에 따른 물체의 움직임 추적
-추적하는 물체에 대해 트랙 ID 부과

- 연결된 검출 결과의 필터링 및 예측
-이전 프레임까지 추적하고 있는 물체 위치의 시퀀스인 트랙에 연결된 검출 결과를 추가하여 필터링 수행
-다음 프레임에서의 검출 결과 연결에 활용하기 위해 다음 프레임에 해당하는 물체 위치 예측


- 시간에 따라 두 과정이 서로 순환하면서 수행됨
- 과거에 딥러닝 모델은 대부분 물체 검출에만 적용되었으나 최근에는 물체 추적에도 활용되는 추세
- 딥러닝 기반의 미래의 물체 위치 예측
-기존 방법의 칼만필터 대신 딥러닝 모델을 사용하여 다음 프레임에서의 물체 필터링 및 예측 - 딥러닝을 이용한 물체 검출 결과 사이의 유사도 측정
-현재 물체 정보와 과거 물체 검출 결과를 딥뉴얼 네트워크를 통해 두 검출 결과의 유사성 판단
-딥러닝의 입력으로 검출 결과에 해당하는 특징값 및 박스 좌표 등 사용 가능
카메라 기반 물체 추적 딥러닝 기술
- 물체의 움직임 예측 방법 사례
-추적 중인 물체의 검출 결과를 예측하기 위하여 T프레임에서의 CNN 특징 지도를 이용하여 T-1프레임까지 얻은 트랙의 박스 좌표 기준으로 움직임을 예측함
-T프레임에 얻은 영상을 CNN을 통과시켜 이전 프레임의 박스 좌표를 기반으로 해당하는 픽처를 추출한 후 T-1프레임의 박스 좌표를 기반으로 해당 영역 특징값 추출
-추출된 특징값을 기반으로 T-1프레임에서 T프레임으로 갈때 박스 좌표의 변화 추정 - 검출 결과 사이의 유사성 판단을 위한 딥러닝 기술 사례
-유사성을 측정하기 위하여 두쌍의 검출 결과를 Siamese network라고 불리는 CNN 네트워크를 적용하여 0부터 1사이의 값으로 유사도 출력
-모든 검출 결과 쌍에 대한 유사도를 테이블로 표현할 수 있음
-헝가리안 알고리즘을 적용하여 최종적인 연결 결과를 얻어냄
[카메라 기반 차선, 도로 영역 검출 딥러닝 기술 심화]
카메라 기반 영역 검출 기술 개요
- 자율주행 중 동적 객체 검출 및 차선, 도로, 횡단보도 등 형태가 분명하지 않는 객체에 대한 인식도 필요
- Semantic 영역 분할 : 카메라 영상 내에 있는 물체들을 의미 있는 단위로 분할하는 방법
-픽셀 기준의 영역 분할과 개체 기준의 영역 분할 기술로 나누어짐 - 영역 분할은 영상 또는 물체를 이루는 각 픽셀이 어느 카테고리에 속하는지 분류하는 것
- Semantic 영역 분할 기술을 적용하여 픽셀 단위의 차선, 도로, 횡단보도 등의 검출 가능
- 카메라 영상에 CNN을 적용하여 특징값을 추출하고 각 픽셀의 카테고리를 판별
- 영상에서 특정 공간에서의 픽셀이 어떤 카테고리에 속하는지에 대한 추상적인 정보 추출 중요
- FCN : Convolution layers만을 적용하여 추상적인 공간 정보 생성
- U-Net, DeepLAB : 인코더 디코더 구조를 사용하여, 인코더 구조에서 CNN을 이용해 추상화된 특징 지도를 추출하고 디코더 구조에서 Upsampling 또는 Deconvolution 과정을 통해 특징 지도의 크기 복원
딥러닝 기반 차선 검출
- 차선 정보는 주행을 위한 정보로 사용 및 고정밀 지도 기반의 맵매칭을 위해 사용
- 차선 정보가 중간에 소실되거나 보이지 않는 경우에도 신뢰성 있는 차선 정보를 제공할 수 있어야 함
- 기존에는 RANSAC과 같은 고전적인 비전 알고리즘 적용
- 최근에는 CNN기반 차선 검출 방법의 활발한 연구
-FCN과 같이 카메라 영상에 Convolutional layers를 적용하여 차선에 대한 픽셀 별 특징값 추출
-로컬하게 표현된 특징값들을 이용하여 차선에 대한 Curve fitting 수행
-3차원에서의 도로 영역으로 Curve fitting한 결과를 투영하여 최종적인 차선 검출 결과 도출 - 도로 검출 기술 : 안전 주행을 위한 도로 정보 제공 및 고정밀 지도에서의 측위를 위한 맵매칭에 사용
- Semantic 영역 분할을 적용하여 운전 가능한 도로 영역 검출
[차세대 레이더 센서 기술 소개]
- 차세대 레이더 센서 기술의 필요성
**- 기존 레이더 센서의 장점
-전자기파의 특성으로 인해 주변의 환경 변화에 강인함 -> 자율주행에서 중요하게 작용
-저렴한 가격으로 정확한 거리 정보 획득 가능
- 기존 레이더 센서의 단점
-횡방향의 해상도가 높지 않음
-주변 장애물에 의한 반사로 인해 발생하는 클러터 현상 -> 오탐률이 다른 센서에 비해 높음** - 차세대 레이더 센서 개발의 필요성
-고해상도의 라이다 센서를 사용하면 레이더 센서의 단점이 극복되지만, 가격이 높음
-3단계 조건부 자율주행에서는 고가의 라이다를 장착하기 부담스러움
-문제를 해결하기 위한 두가지 전략 : 레이더의 해상도 및 성능 개선, 라이다의 비용 절감
-국내외 많은 회사가 새로운 타입의 레이더 센서 개발에 적극적으로 뛰어들고 있음
- 차세대 레이더 센서 기술
- 고해상도 레이더
-많은 수의 배열 안테나를 수직, 수평으로 장착하는 MIMO(Multi-input Multi-output) 기술 사용
-4D 이미지 레이더 : 물체에 대한 4차원 정보(3차원 위치와 속도)를 포인트 클라우드의 형태로 제공 - 일반 레이더와 비교하여 4D 이미지 레이더의 장점 : 높은 해상도
-기존 저해상도 레이더는 물체의 검출 결과 및 신호를 조감도 영역에서만 표현하는 한계 있음
-고해상도 레이더는 라이다 정도의 높은 해상도는 아니지만, 기존 레이더의 단점 극복할 수 있음
-저렴한 가격과 물체의 속도 정보 제공 - 차세대 레이더 기술 연구 이슈
-안테나 원소들의 배열 및 배치, 설계 기술
-Multi dimension의 신호를 효과적으로 처리하기 위한 고속 신호처리 기술
-배열 안테나를 작게 구현할 수 있는 소형화 기술
-고해상도 카메라와의 센서융합 기술
-포인트 클라우드 형식의 데이터를 활용한 딥러닝 기반의 고성능 인지기술 개발
[레이더 기반 인지 기술과 딥러닝]
- 레이더 센서 기반 인지 기술
- 기존에는 대부분 각 레이더 제조업체마다 고유의 인지를 위한 신호처리 기술에 대한 솔루션을 갖고 있음
- 최근에 고해상도 레이더가 개발되면서 딥러닝 기술을 이용한 인지 기술 연구
- 딥러닝을 이용한 카메라와 레이더와의 센서융합 기술 중요
-레이더 : 거리 측정이 정확하고 환경의 영향을 적게 받지만, 오탐률 높음
-카메라 : 해상도가 높고 물체 검출 성능이 뛰어나지만, 거리 측정이 부정확하고 환경에 영향을 많이 받음
-두 센서를 융합하여 서로의 단점 보완 연구 진행
- 레이더 센서 기반 딥러닝 기술
- 물체 검출을 위해 딥러닝을 적용하는 두가지 접근 방법
-거리-도플러 영상을 기반으로 한 2차원 물체 검출
-포인트 클라우드 데이터를 이용한 3차원 물체 검출 - 레이더 센서 기반 인지 연구를 위한 데이터셋
- [nuScenes]
-1대의 32채널 라이다, 5대의 레이더, 6대의 카메라, IMU, GPS 센서
-Continental ARS 레이더 사용(77GHz 장거리, FMCW 방식)
-1000개 종류의 배경에서 140만장의 카메라 영상과 레이더 데이터 제공
-23개 종류의 물체에 대한 3차원 박스가 라벨링 되어있음
-0.5초마다 6.5번의 레이더 스캐닝을 누적해서 포인트 클라우드 데이터 제공 - [ASTYX HiRES2019]
-Astyx 레이더, 2048x618 Point Grey 카메라, 벨로다인 16채널 라이다
-6개 종류의 물체에 대한 3차원 박스 라벨링 제공
- 레이더 센서 기반 딥러닝 기술
- 딥러닝 기반 3차원 물체 검출 기술
-복셀 기반의 방법 : 3차원 영역을 작은 복셀 구조로 나누어 복셀 안의 포인트 데이터로부터 특징값 추출 후 3차원 CNN을 적용하여 물체 검출
-2차원 투영기반의 방법 : 포인트 데이터를 전방 또는 조감도 영역의 다양한 영역으로 투영 후 2차원 CNN 모델을 적용하여 물체 검출
-포인트넷 기반의 방법 : 포인트 클라우드 데이터를 직접 처리할 수 있는 포인트넷으로 물체 검출 - 카메라, 레이더 센서 융합 방법
-카메라를 위주로 하여 물체 검출을 한 후 레이더 정보를 추가로 가져와서 거리 추정 -> 카메라 검출 성능에 영향을 받음
-카메라 영상과 레이더 센서로부터 딥러닝 모델을 적용해서 각각의 특징값을 추출한 후 직접 결합하고 추가적인 딥러닝을 적용해서 물체 검출 -> 센서 융합에 의한 높은 성능 개선 가능
[라이다 센서 심화]
- 라이다 센서 개요
- 물체 주변에 고출력 레이저를 송수신하여 지연시간을 측정하여 거리 추정
- 주변 환경에 대한 3차원의 정밀한 스캐닝 작업 수행
- 습도에 대한 강인성을 높이기 위해 1550nm의 파장의 광원을 사용하는 라이다를 개발 중
- 라이다 센서의 종류
-기계식 라이다 : 라이다의 몸체 또는 부분을 전기 모터를 사용하여 기계식으로 회전시켜 360도, 장거리에 대한 환경인지 가능
-솔리드 스테이트 라이다 : optical phased array라고 불리는 배열 안테나 구조를 사용하여 기계적 회전 없이 배열 안테나 조절, 위상 조절을 통해 특정 방향으로 레이저 발사 및 송신
-MEMS 라이다 : MEMS 기술을 이용하여 반사 거울을 전자식으로 제어해서 넓은 영역 스캐닝
[포인트 클라우드] : 라이다 센서로 취득한 3차원 점의 집합(라이다 센서로 취득한 정보)
- 라이다 센서 데이터 기반 인지
- 라이다 센서 데이터는 물체 표면을 나타내는 3차원 점의 집합이 포인트 클라우드로 표현
- 최근 라이다 포인트 클라우드 데이터를 처리하여 물체 검출 및 환경 인지하는 딥러닝 기법 활발히 연구
- 라이다 기반 인지에서는 포인트 클라우드 데이터를 처리하여 3차원 환경정보를 얻어냄
-3차원 동적물체, 정적물체 검출, 추적
-차량 전방 등의 환경에 대한 거리 측정
-고정밀 지도 생성 및 맵매칭 기반 측위 - 2012년 공개된 KITTI 데이터셋을 시작으로 다양한 데이터셋 공개
- 제품 개발이나 상용화된 알고리즘을 만들기 위해서는 자체적인 데이터셋 수집 필요
[라이다 기반 3차원 물체 검출 딥러닝 기술 심화]
- 포인트 클라우드 기반 특징 추출 방법 중 2차원 평면으로 투영하는 방법이 성능이 저하되는 이유는?
-양자화로 인한 정보 손실
- 라이다 기반 3차원 물체 검출 기술 개요
- 3차원 물체 검출 : 물체의 3차원 위치 정보 제공
- 3차원 물체 검출의 출력 형태
-3차원 바운딩 박스 형태로 제공 : 3차원 박스 형태의 좌표 및 (x,y) 축의 회전 각도 제공
-조감도 영역에서의 2차원 박스 형태로 제공 : 박스의 회전 각도 제공 - 자율주행의 경로 계획 및 판단 시 정확한 3차원 동적 개체의 위치 정보 제공
- 카메라와 달리 라이다는 3차원 측정 정보를 제공하기 때문에 정확한 3차원 물체 검출 가능
- 라이다를 사용한 3차원 물체의 검출 원리
-포인트 클라우드 데이터는 2차원 배열로 이루어진 데이터와 다른 구조를 가지고 있어 기존의 CNN 구조를 이용하기에 적합하지 않음
-포인트 클라우드 데이터로부터 특징값을 추출한 후 특징값을 이용해서 물체의 검출을 해야함
- 라이다 기반 3차원 물체 검출 기술
- 2차원 평면 투영 방법
-포인트들을 전방 또는 조감도 영역으로 직접 투영하여 새로운 2차원 데이터를 만들어냄
-양자화로 인한 성능 저하 때문에 최근에는 많이 사용되지는 않음 - 복셀 기반 표현 방법
-3차원 공간을 작은 복셀로 나누 후에 각 복셀에 들어있는 포인트들을 포인트넷을 적용하여 인코딩
-인베딩 벡터(3차원 복셀 구조안에 인코딩된 벡터)가 포함되어 있는 형태로 포인트 클라우드를 표현 - 포인트넷 사용 방법
-전체의 포인트 클라우드 집합에 포인트넷을 적용
-배경에 해당하는 포인트와 물체에 대한 포인트 분리
-물체에 해당하는 포인트들을 선택해내서 물체에 대한 특징값 추출
-복잡도가 높지만 정보의 손실 없이 모든 포인트 클라우드 데이터를 이용하여 정확한 검출 가능
- 라이다 기반 3차원 물체 검출 기술 사례
- 복셀 기반의 방법 사례 : 세컨드, 포인트필라
-복셀 구조를 기반으로 포인트 데이터를 인코딩한 뒤 3차원 CNN이라는 구조를 적용해서 조감도 영역에서의 특징 지도 추출
-조감도 영역에서의 특징 지도를 기반으로 3차원 박스 검출 - 포인트넷 기반의 방법 사례 : 포인트 RCNN
-1단계 검출 : 물체와 배경에 해당하는 포인트를 구분한후 물체의 대략적인 위치 검출
-2단계 검출 : 대략적인 위치에 해당하는 포인트들을 다시 추출하여 1단계 물체 검출 결과의 정확도 향상 - 복셀과 포인트넷의 혼합방법 사례 : PV-RCNN
-복셀 기반의 방법과 포인트넷 기반의 방법을 혼합하여 라이다 데이터의 풍부한 표현방식 제공
[라이다 기반 3차원 물체 추적 딥러닝 기술 심화]
- 라이다 기반 3차원 물체 추적 기술 개요
- 3차원 물체 검출 결과를 같은 물체에 대해 연결하여 물체의 움직임을 시간에 따라 추적하는 기술
- 3차원 공간에서 새롭게 검출된 물체와 추적하고 있는 물체의 집합들의 유사성을 판단해서 물체 추적을 수행하고 물체 ID 부여
- 물체 추적 문제의 핵심은 다른 시간에 얻은 물체 검출 결과에서 같은 물체에 해당하는 검출 결과를 연결하는 Association 문제
-> 두개의 검출 결과에 대해 쌍에 대한 유사도 판별이 가능해야 함 - 라이다 기반 3차원 물체 추적 과정
-물체 추적을 수행하기 위하여 새로 검출한 물체의 바운딩 박스와 이전 프레임까지 추적중인 물체의 바운딩 박스 안에 있는 라이다 포인트 데이터 추출
-추출된 라이다 포인트 데이터로부터 특징값 추출 후 딥러닝을 이용한 유사도를 측정하고 물체 ID 부여
- 라이다 기반 3차원 물체 추적 기술
- 라이다 데이터의 특징 추출 방법
-새로 검출된 물체와 추적하고 있던 물체로부터 추출된 3차원 라이다 포인트 클라우드 정보를 포인트넷 기반의 딥러닝 모델을 이용하여 특징값 추출
-포인트넷 기반의 딥러닝 모델은 정보의 손실 없이 모든 포인트 클라우드 데이터를 사용하여 유용한 특징값 추출 가능 - 유사도 측정 및 검출 결과 연결
-전체적인 물체 연결 과정은 2차원 물체 추적 기술과 유사
-Siamese 딥러닝 모델을 사용해서 새로 검출된 물체의 특징값과 추적중인 물체의 특징값을 비교하고 두 벡터의 거리를 계산하여 유사도 평가(일반적으로 유사도는 0과 1사이의 실수값으로 출력됨)
-검출 결과의 모든 쌍에 대해 유사도를 계산한 후 헝가리안 알고리즘을 적용하여 연결 결과 출력
- 라이다 기반 3차원 물체 추적 기술 사례
- mmMOT 방법
-검출된 물체와 추적 중인 물체의 라이다 포인트 데이터를 추출 후 포인트넷을 적용해서 특징값 추출
-CNN 네트워크를 적용해서 두 물체의 유사도를 판별하고 선형 프로그램의 최적화 기법을 적용해서 검출 결과 연결 - GNN3DMOT 방법
-검출 결과에 대한 특징을 추출하기 위해 포인트넷을 적용했을때 얻은 특징뿐만 아니라 그 물체의 시간적인 움직임 정보도 LSTM 네트워크를 통해 추출해서 추가적으로 사용
-헝가리안 알고리즘 대신 그래프 뉴럴 네트워크 모델(GNN)을 사용해서 더 정확한 검출 결과 연결 수행
[3차원 물체 검출/추적 통합 기술 심화]
- 3차원 물체 검출/추적 통합 기술 개요
- 기존의 인지 기술에서는 물체 검출과 추적 기술을 별도로 설계
-물체 검출에서는 센서 데이터의 공간적 정보 활용, 물체 추적 기술에서는 시간적 정보 활용 - 환경의 시공간적 정보를 동시에 활용하여 검출/추적 기술의 통합설계 필요
-물체 검출에서는 물체의 시간적 움직임 정보 활용
-물체 추적에서의 물체의 공간적 특징 정보 활용
-물체 검출, 추적 기술의 서로 정보 교환 및 통합 최적화
- 3차원 물체 검출/추적 통합 기술
- 물체 검출에서의 시간적 정보 활용
-카메라 영상을 CNN에 통과하여 나온 특징값을 사용해서 각각의 입력 영상에 대해 검출 결과를 얻게 됨
-비디오 영상을 한꺼번에 처리하여 시공간적 정보를 활용해서 검출 성능 개선 - 시간적 정보를 활용하는 두가지 전략
-비디오 영상에서 물체 움직임에 의해 발생하는 다양한 왜곡 발생
: 시간적으로 얻은 특징값들을 융합하여 특정 영상 프레임의 퀄리티 저하에도 강인한 검출 결과 달성
-물체의 움직임 패턴을 분석하여 물체 검출의 성능 향상
: RNN이나 LSTM 모델을 사용하여 특징값을 추출한 후 물체 검출에 활용 - 물체 추적에서의 물체의 공간적 특징 정보 활용
-물체 검출 시 CNN을 이용하여 특징값을 추출하여 물체 추적의 연결 수행에 재사용 - 센서 융합을 통해 물체 검출을 수행한 경우 다중 센서로부터 추출했던 특징값들을 추적에 사용하여 연결 성능 개선
- 물체 검출과 물체 추적 기술이 서로 유용한 정보 교환
- 물체 검출에서 사용했던 공간적인 정보들이 추적에서 활용 가능
- 물체 추적에서 사용했던 시간적 정보들이 다시 정확한 물체 검출을 수행하는데 사용
- 물체 검출과 추적을 통합하는 딥러닝 모델의 종단간(end-to-end)학습을 통해 최적의 인지 성능 달성

[카메라 기반 거리 추정 기술]
- 카메라 기반 거리 추정 기술 개요
- 거리 추정 : 2차원 카메라 영상을 입력으로 받아 3차원 공간에서의 거리(Depth)값을 알아내는 기술
- 고전적으로 스테레오 비전 기술을 이용한 방법이 많이 사용되어 왔음
- 스테레오 비전 기술 : 두개 이상의 카메라 영상을 이용하여 각 픽셀에 대한 거리 정보를 알아냄
- 최근 딥러닝 기술이 거리 추정 문제에 도입되면서 스테레오 카메라 뿐만 아니라 단일 카메라에 대해서도 거리 추정 기술의 정확도가 크게 향상
- 스테레오 비전 기법 개요
-한장의 카메라 영상으로는 정확한 거리를 알 수 없기 때문에 좌우에 배치된 두대의 카메라로부터 얻은 2차원의 영상들을 이용하여 3차원의 거리(Depth)를 추정
-출력으로 각 픽셀의 거리를 나타내는 깊이지도 생성
-두 카메라를 보정하여 두 카메라의 좌표계를 확립 후, 두 영상에서 대응점을 찾아내는 스테레오 정합 적용
-두 대응점 사이의 Disparity(두 대응점 사이의 위치 차이) 계산하여 거리 추정
- 스테레오 영상 기반 거리 추정 딥러닝 기술
- CNN 모델을 적용하여 Disparity 지도를 직접 생성하는 방식으로 설계
- CNN 구조를 이용하여 얻은 Disparity 지도와 실제 알고 있는 정답 Disparity와의 차이를 나타내는 손실함수를 최소화하여 모델을 훈련
- 좌우 두 이미지의 기하학적 상관관계를 데이터를 통해 학습하여 거리 추정 가능
- 기존의 스테레오 방식은 카메라의 보정 오차에 대해 민감
- 딥러닝 기반의 방법은 보정 오차에 대해 더 강인한 성능을 보임
- 단일 영상 기반 거리 추정 딥러닝 기술
- 사람은 물체에 대한 사전 지식을 사용하면 한쪽 눈만을 사용해서 거리 판별 가능
- 딥러닝 모델을 사용하면, 대규모 영상으로부터 물체의 크기 등에 대한 사전 지식을 학습하여 단일 영상으로부터 거리 추정 가능
- 단일 영상 기반 거리 추정 딥러닝 기법
-CNN 모델을 이용하여 단일 영상으로부터 거리 지도 생성
-RGB-D 카메라 센서를 이용하여 카메라 영상과 거리값을 동시에 취득하고 트레이닝 데이터셋 구축
-딥러닝 모델로부터 얻은 거리 추정값과 정답에 해당하는 정답 거리 지도와의 차이를 최소화 하도록 딥러닝 모델 훈련
-최근에는 단일 영상으로부터 스테레오를 가정해서, 단일 영상이 왼쪽 영상이라고 가정하고 오른쪽 영상을 직접 생성해내서 생성해낸 좌우 영상을 이용해서 거리 추정 방법도 제안

[카메라, 레이더 센서융합 딥러닝 기술 심화]
- 카메라, 레이더 센서융합 딥러닝 기술 개요
- 레이더는 자율주행에서 많이 사용되고 있으나 높은 오탐률이 단점
- 딥러닝이 적용되면서 최근 카메라 영상 기반의 물체 검출 기술의 성능이 급속도로 발전
- 카메라, 레이더 센서는 라이다 센서에 비해 가격이 저렴하여 현재 2단계 수준의 자율주행 기능에서 사용
- 카메라 센서가 제공하는 영상 정보와 레이더 센서가 제공하는 거리 측정 정보를 융합하여 신뢰성 높은 물체 검출 가능
- 카메라, 레이더 센서 융합 전략
-카메라 센서 중심의 융합 방법
: 카메라로 2차원 물체 검출 결과를 생성해내고 레이더 센서 정보를 읽어서 가져와서 정밀한 거리 정보 제공
-레이더 센서 중심의 융합 방법
: 레이더 센서를 이용하여 조감도 영역에서 물체를 검출한후 카메라 정보를 이용하여 레이더 검출 결과의 오류 수정 - 카메라, 레이더 센서 융합 전략
-특징값 중심의 융합 전략
: 4D 이미지 레이더와 같은 고해상도 레이더의 경우에 주로 적용
: 레이더 데이터로부터 추출한 특징값을 카메라로 도출된 CNN 특징값과 융합하여 융합된 특징값을 이용하여 물체를 검출
: 카메라, 라이다 센서 융합 전략과 유사
- 카메라, 레이더 센서융합 딥러닝 기술 사례
- 2019년 'EuRAD'라는 학회에서 발표 : 카메라, 레이더 융합을 통한 3차원 물체 검출 방법
-딥러닝을 적용하여 카메라, 레이더 센서 융합 수행
-레이더 포인트 클라우드 데이터를 조감도 영역에서의 특징 지도로 변환후 조감도 영역에서 융합 수행
-융합된 특징값을 기반으로 추가적인 뉴럴네트워크 구조를 적용하여 3차원 물체 검출 수행
[카메라, 라이다 센서융합 딥러닝 기술 심화]
- 카메라, 라이다 센서융합 딥러닝 기술 개요
- 3단계 이상의 자율주행에서 카메라와 라이다 센서는 인지를 위한 핵심 센서로 간주되고 있음
- 두 센서의 장단점을 보완하기 위해 카메라, 라이다 센서 융합 기술이 필요
-카메라 : 물체를 인식하기 위한 풍부한 정보 제공, 거리 정보 부정확
-라이다 : 정확한 거리 정보 제공, 해상도가 카메라만큼 높지 않음 - 최근 카메라, 라이다 센서 융합을 위한 다양한 딥러닝 기법이 연구되고 있음
- 카메라, 라이다 센서융합 접근 방법
- 카메라 중심의 센서융합 기술
: 카메라를 주센서로 사용하고 라이다 정보를 부가적으로 융합하는 기법
-카메라 영상에 CNN 기반의 딥러닝 모델을 적용하여 물체에 대한 2차원 박스 검출
-카메라 영상의 2차원 박스에 해당하는 3차원 공간의 영역을 프러스텀이라고 부름
-검출된 2차원 박스에 해당하는 프러스텀에 존재하는 라이다 포인트들을 추출
-추출된 라이다 포인트들을 포인트넷으로 처리하여 3차원 검출 정보를 얻어냄 - 카메라 중심의 센서융합 기술 사례
-프러스텀 포인트넷 방법
--카메라 영상에 2D CNN 물체 검출 기법을 적용하여 2차원 영역 추출한 후 2차원 영역을 3차원으로 변환하여 프러스텀 안에 있는 포인트들에 대해 3차원 영역 분할 수행
--물체가 아닌 배경을 마스킹하고 물체 부분에 포인트넷을 적용하여 3차원 박스 추정
-카메라, 라이다 특징값 융합 기술
-카메라와 라이다 센서 각각으로부터 물체에 대한 특징값을 추출한 후 융합하여 물체 검출
-카메라 영상에 CNN을 적용하여 특징값 추출
-라이다 포인트 클라우드를 3차원 복셀 구조를 기반으로 인코딩
-앵커박스를 기반으로 융합하는 방법과, CNN으로 얻은 2차원 카메라 특징지도를 3차원 공간으로 투영하여 융합하는 방법이 있음
-예>AVOD(IROS 18), Cont-Fuse(ECCV 18), MMF(CVPR 19), 3D-CVF(ECCV 20) - 카메라, 라이다 특징값 융합 기술 사례
-3D-CVF 방법
--카메라 센서 데이터를 CNN을 적용하여 2차원 특징 지도 도출
--2차원 특징 지도를 3차원 복셀 구조로 투영하여 새로운 3차원 특징지도 구성
--라이다 데이터를 인코딩하여 얻은 특징지도와 융합 후 새로운 특징값으로 3차원 물체 인지 수행

[AI기반 인지 하드웨어 플랫폼 기술 심화]
- AI기반 인지 하드웨어 플랫폼 개요
- 자율주행 컴퓨터 : 카메라, 라이다, 레이더 등의 센서 신호를 가져와서 자율주행 인지 기능을 직접 수행하기 위한 하드웨어
- 자율주행을 위한 하드웨어의 사양은 인지 기능의 실시간 계산이 가능해야 하고 전력 소모가 낮아야 함
- 차량 또는 엣지에서 AI를 수행하기 위한 하드웨어 칩셋 필요
-고속 계산 및 저전력을 위한 가속기 필요
-센서 데이터 입출력 인터페이스, 전처리/후처리 등을 위한 범용 CPU/GPU 필요 - 클라우드 서버에서의 학습을 위한 가속기 및 GPU 서버 하드웨어 필요
- AI기반 인지 하드웨어 플랫폼 기술
- 딥러닝 가속기 기술 : 딥러닝에 자주 사용되는 연산을 가속화하여 빠른 시간 안에 적은 전력으로 계산
-성능 저하 없이 8비트 이하의 연산 수행 가능 - 가속기 구성
-GEMM(General matrix and mutiply engine) : 딥러닝에서 가장 계산량이 많은 행렬 곱을 수행
-SRAM : 딥뉴럴네트워크의 가중치 또는 활성화값을 저장하기 위한 로컬메모리
-DRAM : 딥뉴럴네트워크의 입출력 등을 저장하기 위한 메모리
-Interconnect/Fabric : 서로 다른 처리 유닛이나 메모리를 연결하는 로직
-콘트롤러 : 제어나 통신을 위한 명령어 수행 - 아키텍처 경량화
-딥러닝 모델 압축 : 노드 프루닝, 채널 프루닝, Depthwise separable convolution
-신경망 가중치, 활성화값의 양자화를 통해 계산량을 줄임 - 컴파일러
-Pytorch나 Tensorflow의 라이브러리를 이용해 작성된 고수준의 코드를 명령어셋으로 변환
- AI기반 인지를 위한 자율주행 컴퓨터
- 테슬라 FSD(Full self-driving) 컴퓨터
-NNA(Neural network accelerator) : 72 TOPs 연산 속도 제공
-CPU : 주로 오토파일럿을 위한 제어 기능 수행
-ISP(Image signal processor), 비디오 인코더 : 카메라 영상 입력 처리
-GPU : NNA로 해결하지 못하는 부분에 대한 후처리 수행
-Memory : 중간 결과들은 SRAM에 저장, 최종 결과는 DRAM에 저장
-신뢰성을 보장하기 위해 두개의 칩을 서로 다른 파워 서플라이를 사용하여 장착

[고성능 센서 차량 네트워크 기술]
- 고성능 센서 차량 네트워크 기술 개요
- CAN/CAN-FD : 1Mbps, 현재 가장 많이 사용하는 차량 네트워크, Bus토폴로지 방식
- FlexRay : 10Mbps, 고속 데이터 전송, Bus토폴로지 방식
- MOST : 24Mbps, 멀티미디어 전송 전용, Bus토폴로지 방식
- Twisted Pair 이더넷 : 100Mbps-10Gbps(P2P), 10Mbps(Bus토폴로지)
- 초고속 차량 네트워크 기술
- 차량 내 고속 데이터 통신을 지원하기 위해 이더넷 기술 도입 예정
- 자율주행 센서로부터 유입되는 데이터량 증가
-고해상도 카메라 영상, 고해상도 라이다 데이터로부터 발생되는 트래픽을 관리할 수 있는 네트워크 필요
-CAN ECU와 이더넷 ECU를 통합 관리할 수 있는 기술 필요
-Bus 기반 이더넷과 P2P 기반 Serdes 방식이 혼합된 형태로 표준화 진행 - Serdes
-링크 기반의 고속 차량 통신 기술
-기존의 고해상도 Display 등의 통신에 사용
-고해상도 카메라 센서로부터 얻은 비디오 데이터 전송을 위해 고려중
-최대 16Gbps까지 전송 속도 지원 - 차량 네트워크 발전 방향
-고속 BUS 네트워크 전송 기술
-P2P 고속 데이터 전송 기술
->혼합 사용 및 호환성 지원에 대한 연구 필요


[고정밀 지도 관리 기술 심화]
- 고정밀 지도 기술 개요
- 자율주행을 위해서는 cm 수준의 정확도를 갖는 고정밀 지도 필요
- 사전에 MMS(Mobile mapping system) 차량을 이용하여 고정밀 지도를 제작
-지형 지도 : 주변 지형의 형태를 직접 센서데이터를 사용하여 구성
-시맨틱 지도 : 측위에 관련된 특정 지형, 도로 정보, 랜드마크 등을 지형 지도에 추가해놓은 형태 - 자율주행차량은 측위 기술을 수행하여 고정밀 지도에서의 자신의 위치를 추정
-Odometry 기술
-맵매칭 기술
- 고정밀 지도 구성
- 고정밀 지도 구성
-도로의 구조 및 공간적 구성(예:주행차로, 교차로, 차로분기점, 차로합류점 등)
-차량의 주행공간에 대한 정보
-도로의 내부 및 주변에 존재하는 다양한 형태의 표시
-표지 및 시설물 - 표준화
-ISO TC 204 : 지능형 교통체계(ITS) 분야에 요구되는 아키텍처, 통신 및 서비스에 대한 표준화를 논의하는 기구, 자율주행, 협력주행을 위한 지도에 대한 표준화 진행 중
-OGC(Open Geospatial Consortium) : 정밀 지도 관련 다수의 표준화 진행 중
-NDA(Navigation Data Standart) : 차량 OEM 회사, 지도 공급자 및 내비게이션 서비스 업체들이 모인 그룹으로 ADASIS라는 자율주행을 위한 지도 표준 발표
-국내에서는 현대엠엔소프트, SKT등에서 자체 모델을 구축하고 있고 국토지리정보원에서도 고정밀 지도에 대한 표준화 진행 중
- 고정밀 지도 관리 기술
- LDM(Local Dynamic Map) 동적 정보 시스템
- 고정밀 지도의 갱신 및 관리
-시간에 따른 환경 변화로 갱신과 관리 필요
-클라우드 기반 지도 관리 플랫폼 요구됨
-자율주행차, 인프라, 엣지 등에서 수집한 환경 정보를 온라인으로 갱신하는 기술 필요
-업데이트된 고정밀 지도를 V2X 등의 통신 방법을 사용하여 자율주행차에 전달 - 시맨틱 지도 관리
-AI 기술이 측위에도 적용되면서, 딥러닝의 출력(Neural representation)을 시맨틱 지도의 임베딩 데이터로 활용하는 연구 진행중


[고정밀 지도 기반 측위를 위한 딥러닝 기술 심화]
고정밀 지도 기반 측위 기술 개요
- 고정밀 지도 기반의 측위 기술
-고정밀 지도의 정보와 차량이 실시간으로 수집한 정보를 이용하여 차량의 현재 위치를 알아내는 기술 - 측위 기술의 구성
-Odometry 기술 : 차량의 이전의 위치에서부터 상대적으로 얼마만큼 이동했는지를 측정하는 방법
-맵매칭 기술 : 차량 센서 데이터와 지도 데이터를 정합하여 지도 위의 차량 위치를 추정하는 방법 - 기존 측위 기술의 한계
-기존의 모델 기반의 방법들은 이상적인 상황에서는 센서정보를 이용하여 정확하게 자신의 위치를 추정할수있음
-실제로는 부정확한 세서 측정값, 실제와 잘 맞지않는 시스템 모델, 복잡한 환경의 다이내믹스, 제약사항 등이 측위 기술의 성능에 영향을 미침
-Odometry 추정 : 저가 관성항법장치의 오차가 크고 시간에 따라 누적, Visual odometry의 고전적인 기법들은 카메라 영상의 취득 퀄리티에 영향을 받음
-맵매칭 : 부정적인 센서 데이터와 주변 환경의 변화로 인해 측위 정확도가 저하되는 문제 발생
측위를 위한 딥러닝 기술
- 딥러닝 기술
-데이터 기반의 접근 방법, 수많은 데이터를 사용하여 복잡한 입출력 관계를 모델링
-데이터를 활용하기 때문에 새로운 환경에 대해 측위 알고리즘의 자연스러운 진화가 가능 - 딥러닝 기반 Odometry 기술
-Visual odometry 기술 : 카메라 영상으로부터 카메라의 움직임을 추적하여 차량의 위치 상태를 추정
-라이다 odometry 기술 : 라이다 포인트 클라우드 데이터의 움직임을 추적하여 위치의 변화를 추정 - 딥러닝 기반 맵매칭 기술
-이미 생성된 지도 정보와 센서를 정합
-디스크립터 매칭 기술 : 센서 데이터로부터 특징점들을 검출한 후 주변 환경을 압축하여 표현하는 표현자(Feature descriptor)를 추출, 센서로부터 얻은 표현자와 지도에 임베딩된 표현자를 정합하여 차량 위치 추정

-키워드 : 종단간 학습 : 전체 시스템의 정확도를 최대화하기 위한 학습 방법
[자율주행을 위한 예측 기술 심화]
고전 예측 기술의 한계
- 경로 예측 기술
-자율주행차가 안전한 주행을 하기 위하여 동적 객체들의 과거 경로와 주변 상황들을 반영하여 의도나 미래의 거동을 예측하는 기술 - 고전적인 예측 기술
-등속도 또는 등가속도 모델에 의한 예측
-선형보간법에 의한 예측 기법
-칼만필터와 같은 통계적 예측 모델 사용 - 고전 예측 기술의 한계
-동적 객체들의 거동은 객체들의 의도, 주변의 도로 및 주행 상황, 객체간 상호작용 등의 다양한 요소에 의해 영향을 받음
-예측 결과는 하나의 최적의 경로로 출력되기보다는 여러개의 가능 경로가 확률과 함께 나타나는 것이 합리적임
-고전 예측 기술에서는 이러한 문맥적 정보들의 활용이 어렵고 하나 이상의 다양한 예측 결과를 도출하기 어려운 문제점이 있음
딥러닝 기반 차량 경로 예측 기술
- RNN(recurrent neural network)에 기반한 차량 경로 예측
-순차적인 시계열 데이터를 해석하기 위한 RNN 또는 LSTM 모델을 이용하여 과거의 차량 경로 데이터를 입력으로 받아 미래의 차량 경로 데이터를 생성
-인코더-디코더 구조로 구성
-딥러닝의 뛰어난 표현력을 이용하여 기존의 칼만필터 등에 비해 개선된 예측 정확도를 달성 - 동적 객체 간의 상호작용을 고려한 차량 경로 예측
-타겟 차량과 주변 동적 차량들의 과거 경로들을 딥러닝 모델에 입력하여 상호작용을 고려한 예측 결과를 출력 - 주변 도로, 정적 환경을 고려한 차량 경로 예측
-주변의 도로나 정적 환경을 2차원 영상으로 구성하여 특징값을 추출하고 이를 차량 경로의 특징값과 융합하여 경로 예측을 수행
[상황 예측을 위한 딥러닝 기술 심화]
자율주행을 위한 상황 예측의 필요성
- 자율주행차가 위험이나 충돌을 방지하기 위해서는 미래에 나타날 상황을 예측해야함
- 휴먼 운전자는 본능적으로 주변에 대한 인지 결과를 바탕으로 미래에 일어날 상황을 예측하여 대응
- 자율주행의 안정성 향상을 위해 다양한 종류의 동적 객체들의 움직임 예측을 기반으로 다양한 주행 상황에 대한 예측이 필요
딥러닝 기반 상황 예측
- 딥러닝 기술을 사용하여 센서 데이터로부터 동적 객체의 위치 뿐만 아니라 상태 정보도 추출
- 카메라 영상에 CNN을 적용하여 보행자의 자율주행차 주시 여부 또는 전방 차량의 방향지시등 상태 등 파악 가능
- RNN이나 LSTM 모델을 이용하여 동적 객체의 위치, 상태 등의 순차적인 변화를 분석하여 미래의 주행 상황 예측
- 보행자 거동 예측을 위한 딥러닝 기술
-비디오 영상을 분석하여 휴먼의 행동을 분류하고 예측하는 딥러닝 모델
-카메라 영상으로 휴먼의 중요 관절에 해당하는 키포인트를 추출하는 자세추정 딥러닝 모델
-과거의 휴먼의 자세와 상태 정보로부터 미래의 휴먼의 자세와 상태 정보를 예측하는 딥러닝 모델 - 비디오 예측 기술
-동영상의 다음 프레임을 직접 예측하는 기술
-가까운 미래에 대한 예측은 가능하나 먼 미래에 대한 경우 동적 객체들의 움직임 등에 대한 시맨틱 정보들을 활용해야 정확한 예측이 가능
-포즈의 정답(Ground truth)에 주어지지 않는 비지도 학습 방법에 대한 연구가 활발함 - 의도 예측
-동적 객체 움직임의 목표 또는 의도를 예측하는 작업
-동적 객체의 실제 경로를 예측하는 것보다 동적 객체의 목표방향 또는 의도를 예측하게 되면 예측 작업의 복잡도를 간소화시킬 수 있는 장점
-의도 예측 결과를 조건으로 하여 경로를 예측하여 더 높은 예측 정확도 달성 가능