1. 작성 이유:
차량이 이동하면서 차량의 불규칙한 진동이 발생하여 센서의 위치가 초기 위치와 바뀜. calibration이 필요
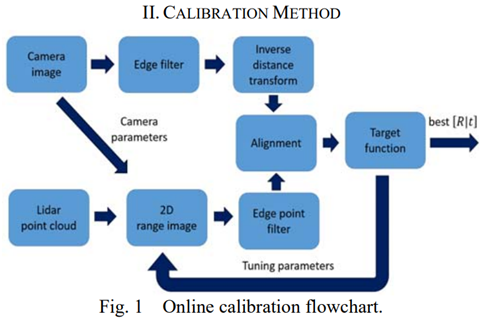
2. 과정:
- 내부/외부 matrix로 3D POINT CLOUD를 2D range image로 변경
- edge point filter(Canny edge detector)로 edge point 제거
- IDT가 카메라 이미지의 edge point를 결정할 수 있음
- Target function으로 best parameter 결정
- 적절한 값 얻은 뒤 calibration 끝냄
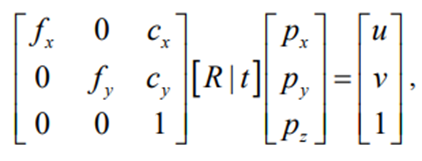
- 2D Range Image
아래의 내적 행렬과 외적 행렬을 사용하면 3D point coordinates가 image coordinates로 변환된다. 즉, camera images 안 물체의 position이 range image와 동일해진다.
- Edge Point Cloud Filter
위 과정을 통해 변환된 range image는 각각의 line에 대한 edge가 없어 형태유사점을 찾는데에 사용할 수 없다. range image에서 각각의 points를 얻기 위해서 우리는 근처로부터의 point의 거리를 알아야 한다. 이 때, 먼 거리에 있는 점을 포함하는 것을 막기 위해 distance threshold를 설정하는 것이 필요하다.
- Image Edge Filter and IDT
Canny edge detector가 카메라와 lidar의 edge point를 정렬해준다. 그때, edge image의 smoothness를 증가시켜주기 위해 IDT가 적용된다. smoothness가 증가할 때, lidar의 edge point hit pixels가 근처에 위치한다. 하지만 정확히 camera mage의 edge인 것은 아니다.
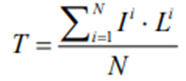
- Target Function
본 논문의 method 성능 검사를 위해 target function (T)를 사용한다.
3. 결과:
본 논문의 method에는 edge filter의 threshold를 setting하는 것이 빛과 그림자의 변화에 따라 어려워진다는 한계가 존재한다. 카메라가 빛의 변화에 강하지 않기 때문에 Lidar도 보정할 수 없다. 게다가 laser scanner은 range image에 물체를 표시하기에 충분한 점의 density를 가지고 있지 않다는 문제가 있다. 이는 Lidar 이미지에서 서로 가까이에 위치한 객체에 대해 소수의 edge point가 감지되기 때문에 낮은 T-value가 된다. 본 논문의 알고리즘은 최적의 T-value를 찾기 위해 parameter들을 조정한다.
edge point 표현의 한계를 해결하기 위해서 assigning weights, rewarding the objects near the sensor에 집중해야 한다. 조정 파라미터의 range를 수정하기 위해서 IMU를 설치하면, IMU가 차의 진동을 감지하고 조정 파라미터의 최적의 범위를 선택할 수 있다.