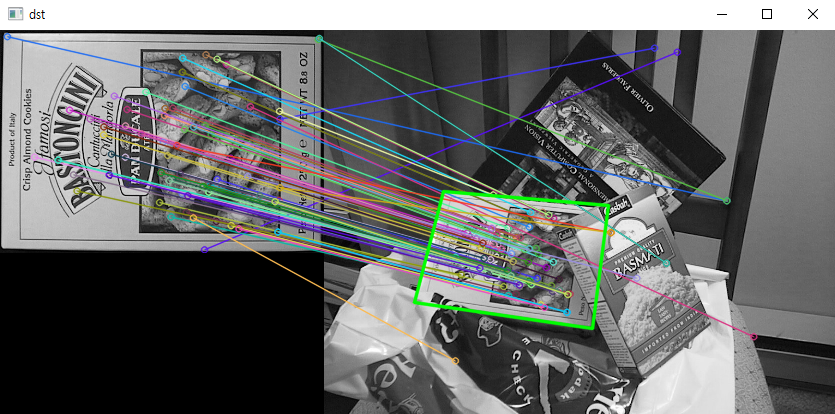
호모그래피
Homography
두 평면 사이의 투시 변환(Perspective transform)
8DOF : 최소 4개의 대응점 좌표가 필요
호모그래피 행렬 구하기
srcPoints : 입력 점 좌표
dstPoints : 결과 점 좌표
method : 호모그래피 행렬 계산 방법
기본값은 0이며 이상치가 있을 경우 LMEDS, RANSAC, RHO 중 하나를 지정
ransacReprojThreshold : 대응점들을 inlier로 인식하기 위한 최대 허용 에러
mask : 출력 Nx1 마스크 행렬
maxIters : RANSAC 최대 반복 횟수
confidence : 신뢰도 레벨
return : 3x3 호모그래피 행렬
Mat findHomography(InputArray srcPoints, InputArray dstPoints,
int method = 0,
double ransacReprojThreshold = 3,
OutputArray mask = noArray(),
const int maxIters = 2000,
const double confidence = 0.995);RANSAC
RANdom SAmple Consensus
이상치(outlier)가 많은 원본 데이터로부터 모델 파라미터를 예측하는 방법