Ubuntu ROS
1.[ROS] ubuntu 18.04 LTS melodic 설치
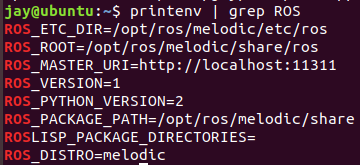
ROS melodic wiki(http://wiki.ros.org/melodic/Installation/Ubuntu위의 링크를 참조하여 작성하였다.packages.ros.org. 로 부터 다운받기 위해 권한 허용 설정key setupROS melodic 설치d
2.[vmware] ubuntu 18.04 LTS 설치
ubuntu 18.04Create a New Virtual Machine 선택다운받은 iso파일 선택후 Next 버튼 선택이름 및 비밀번호설정(까먹지 않게 유의)가상머신 설치할 경로 설정최대 disk 크기 설정 (20GB)Store virtual disk as a si
3.[VMware] ubuntu 18.04 LTS 디스크 용량 늘리기

ubuntu의 현재 disk 저장공간 및 사용량 확인하지만 가상공간에서 적은 저장공간으로 사용하기에는 턱없이 부족하다.ubuntu를 종료하고 설정 들어가야하므로 종료를 시켜준다.vmware 실행ubuntu 64-bitSetting 클릭 Hard Disk 선택 후 Exp
4.[ROS] catkin workspace 생성

공통된 source를 가지는 ROS 패키지들을 하나로 묶아 관리하는 workspace cakin_make 이후 build와 devel 생성됨
5.[Ubuntu 18.04 LTS] 다중분할 가능 terminal 치 (Terminator)
Terminator intall 하기 terminator은 기존 ubuntu terminal 보다 편리하며 보기 좋은 terminal이다. 이는 아래의 명령어를 통해 쉽게 설치할 수 있다. show applications 에서 확인 가능 단축키는 아래와 같다
6.[usb_cam] parameter
usb_cam/launch/usb_cam-launchusb_cam/nodes/usb_cam_node.cppsave and catkin_make
7.[usb_cam] OBS studio
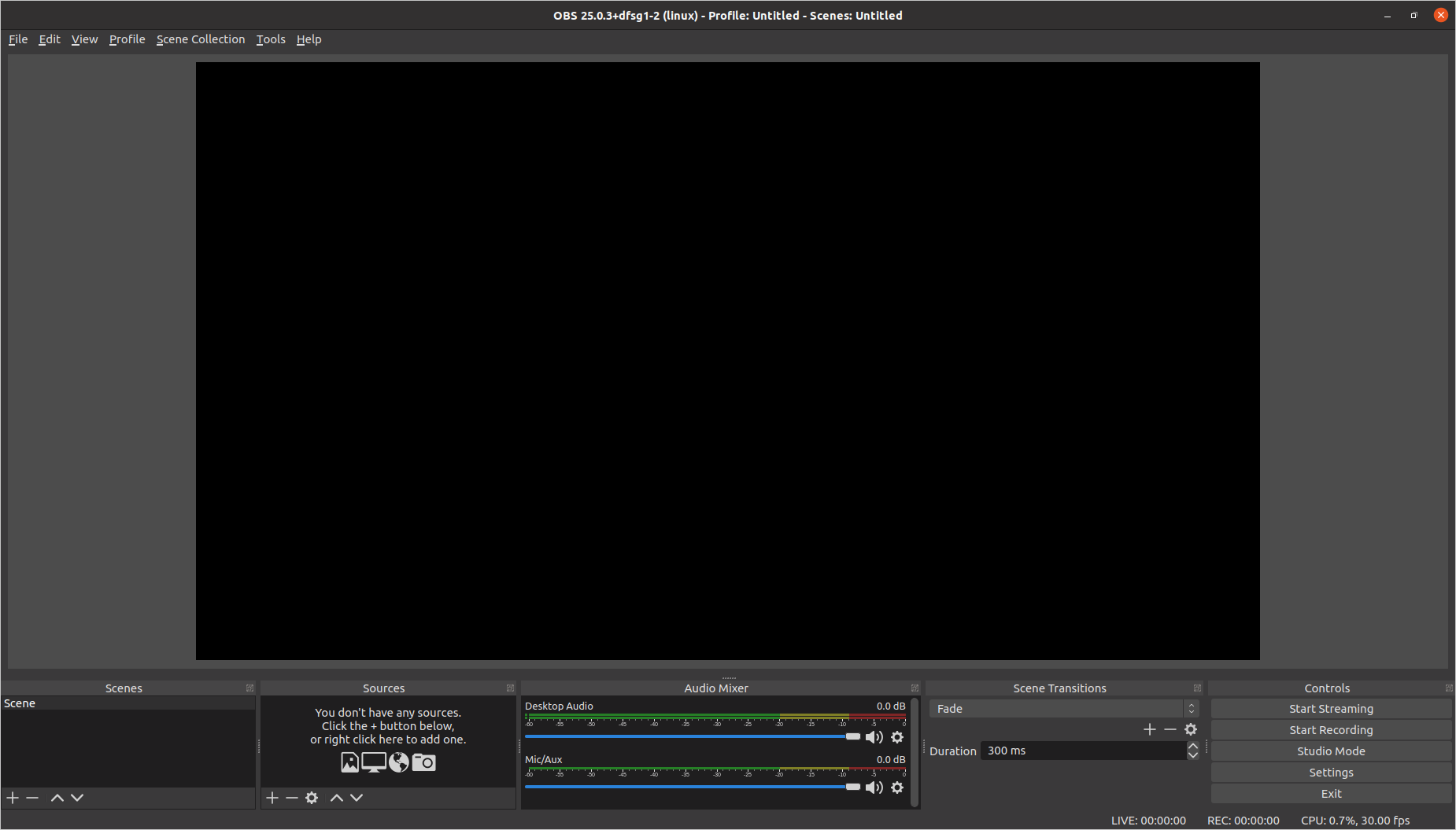
Add OBS Studio, FFMpeg PPA Repo update and installSources at the bottom left and right-click to add deviceAdd -> video capture device(v4l2)click okDev