위의 링크를 참조하여 작성하였다.
ROS melodic 설치
- packages.ros.org. 로 부터 다운받기 위해 권한 허용 설정
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
- key setup
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -- ROS melodic 설치
- debian pakage update
sudo apt update- Full Package 설치 (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception
sudo apt install ros-melodic-desktop-full- 환경 설정
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc- ROS package 설치
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential- rosdep 설치 및 초기화
sudo apt install python-rosdepsudo rosdep init
rosdep update설치 확인
printenv | grep ROS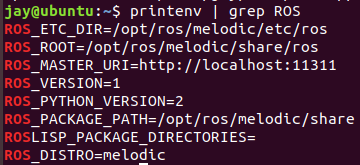
위와 같이 출력되면 정상적으로 설치 완료
Turtlesim, rqt_graph 실행
- Turtlesim (각 다른 터미널에서 실행)
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key- rqt_graph (node, topic 확인)
rqt_graph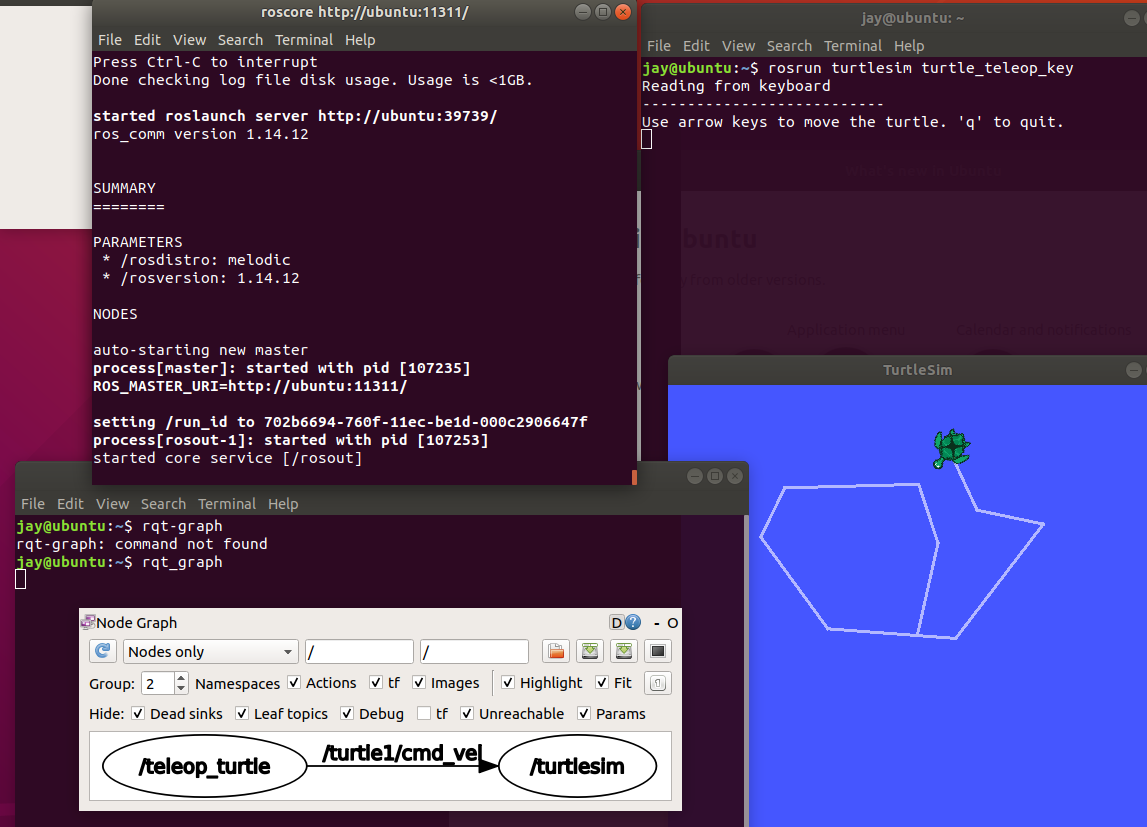
Autonomous driving vision