Omniwheel Kinematics

위와 같이 보이는 kinematics에서 아래와 같은 공식이 나온다.
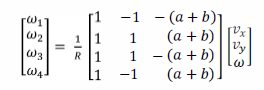
이때 w1, w2, w3, w4 값에 대한 것은 어떻게 측정할까? 먼저 우리가 로봇에 명령을 주었을 때, vx, vy, w값을 줄 것이다. 그렇다면 이 값을 갖고 로봇은 pwm을 이용하여 각각에 원하는 속도 값을 주어야 한다. 그렇게 한다면 w1, w2, w3, w4값을 구할 수 있고, pwm에 대하여 비례식으로 모터는 회전할 것이다(최대 rad2sec, tick_num 필요). 그렇게 비례식으로 입력한다면, tick값을 계산하여, 실제 회전수를 구하여 이를 아래의 필요한 부분에 대입하여 사용한다.
Calculate Odometry
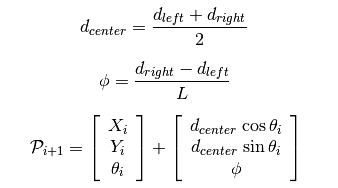
dx, dy, dtheta 에 대해 구해야 한다고 하자, 각각에 대한 delta 값은 우측 항의 요소들과 같다.
그렇다면 dcenter은 무엇인가?
dcenter = (dright + dleft)/2 이다. dleft와 dright는 구해진 w1, w2, w3, w4값에 r을 곱하여 만든다. 그 후, 각 방향에 대한 벡터합을 구한 뒤, dleft, dright값을 구한다.
이렇게 구한 델타 값을 이용하여 odometry에 계속하여 더한다. (단 theta는 360' 가 한계)
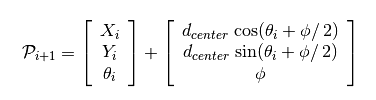
위와 같은 방식으로도 계산이 가능하며, 이는 터틀봇에서 채택한 방식이기도 하다.
예시 코드
- 모터 code 작성
#ifndef _ONBOARD_MAT01_H_
#define _ONBOARD_MAT01_H_
#include <Encoder.h>
//Motor param config
#define MotorType DC_Motor
// define your robot' specs here
#define MOTOR_MAX_PWM 255 // motor's maximum RPM
#define MAX_RPM 158 // motor's maximum RPM
#define COUNTS_PER_REV 2300 // wheel encoder's no of ticks per rev
#define WHEEL_DIAMETER 0.068 // wheel's diameter in meters
#define PWM_BITS 8 // PWM Resolution of the microcontroller
#define BASE_WIDTH 0.26 // width of the plate you are using
//PID parmeter
#define K_P 3.0 // P constant
#define K_I 0.2 // I constant
#define K_D 0.2 // D constant
struct port_t
{
int Dir_A;
int Dir_B;
int PWM_Pin;
int Encoder_A;
int Encoder_B;
};
//===================
// Define motor port
#define PORT_LF 0
#define PORT_RF 1
#define PORT_LR 2
#define PORT_RR 3
port_t port[4] =
{
// A B PWM EN_A EN_B
{35, 34, 12, 18, 31}, // A-- Right Rear (RR)
{36, 37, 8, 19, 38}, // B-- Left Rear (LR)
{42, 43, 9, 3, 49}, // C-- Right Front(RF)
{A5, A4, 5, 2, A1}, // D-- Left Front(LF)
};
class DC_Motor
{
private:
int Dir_A, Dir_B;
int PWM_Pin;
int Encoder_A, Encoder_B;
Encoder *_encoder;
int dir;
float kp, ki, kd;
int Port;
long prev_encoder_ticks_;
int Last_tar, Bias, Last_bias, Pwm, Last_Pwm, Out_Pwm;
int rpm;
public:
DC_Motor(int Motor_Port) //
{
Port = Motor_Port;
Dir_A = port[Port].Dir_A;
Dir_B = port[Port].Dir_B;
PWM_Pin = port[Port].PWM_Pin;
Encoder_A = port[Port].Encoder_A;
Encoder_B = port[Port].Encoder_B;
}
int Init(int _dir)
{
pinMode(Dir_A, OUTPUT);
pinMode(Dir_B, OUTPUT);
pinMode(PWM_Pin, OUTPUT);
_encoder = new Encoder(Encoder_A, Encoder_B);
kp = K_P;
ki = K_I;
kd = K_D;
dir = _dir;
}
void PrintPortConfig()
{
Serial.print("Motor Prot : ");
Serial.print(Port); //
Serial.print(", Dir : ");
Serial.print(Dir_A);
Serial.print(", ");
Serial.print(Dir_B);
Serial.print("\t, PWM : ");
Serial.print(PWM_Pin);
Serial.print(", Encoder : ");
Serial.print(Encoder_A);
Serial.print(", ");
Serial.println(Encoder_B);
}
int setSpd(int spd)
{
spd = dir?(-spd):(spd);
if(spd > 0)
{
digitalWrite(Dir_A, HIGH);
digitalWrite(Dir_B, LOW);
analogWrite(PWM_Pin, abs(spd));
}
else if(spd < 0)
{
digitalWrite(Dir_A, LOW);
digitalWrite(Dir_B, HIGH);
analogWrite(PWM_Pin, abs(spd));
}
else
{
digitalWrite(Dir_A, LOW);
digitalWrite(Dir_B, LOW);
analogWrite(PWM_Pin, 0);
}
}
long getEncoderPosition()
{
long position = _encoder->read();
return dir ? -position : position;
}
void clrEncoderPosition()
{
_encoder->write(0);
}
int getMotorRPM()
{
return dir ? -rpm : rpm;
}
void updateSpd()
{
// this function calculates the motor's RPM based on encoder ticks and delta time
// convert the time from milliseconds to minutes
// unsigned long current_time = millis();
// unsigned long dt = current_time - prev_update_time_;
// double dtm = (double)dt / 60000;
double dtm = 0.000167;
double delta_ticks = getEncoderPosition() - prev_encoder_ticks_;
rpm = (delta_ticks / COUNTS_PER_REV) / dtm; //calculate wheel's speed (RPM)
// prev_update_time_ = current_time;
prev_encoder_ticks_ = getEncoderPosition();
}
void Incremental_PID(int target)
{
updateSpd();
if(Last_tar > target)
Last_tar-=2;
else if(Last_tar < target)
Last_tar+=2;
Bias = rpm - Last_tar;
Pwm += kp * (Bias - Last_bias) + ki * Bias;
if(Pwm > MOTOR_MAX_PWM) Pwm = MOTOR_MAX_PWM;
if(Pwm < -MOTOR_MAX_PWM) Pwm = -MOTOR_MAX_PWM;
Last_bias=Bias;
Out_Pwm *= 0.7;
Out_Pwm += Last_Pwm * 0.3;
Last_Pwm = Pwm;
if(Out_Pwm < 6 && Out_Pwm > -6) Out_Pwm = 0;
setSpd(Out_Pwm);
}
void Update_PID(float _kp, float _ki, float _kd)
{
kp = _kp;
ki = _ki;
kd = _kd;
}
};
#endif간단한 모터 코드이다. 모터에 필요한 핀 번호는 port에 저장되어 있다. 만일 자신의 핀번호와 다르다면 수정하도록 하자.
- omniwheel 4 motor 제어 코드
#include "onboard_MAT01.h"
typedef DC_Motor Motor_Class;
class Mecanum_Car
{
public:
int Now_spd;
Mecanum_Car(Motor_Class *_LF_Wheel, Motor_Class *_RF_Wheel, Motor_Class *_LR_Wheel, Motor_Class *_RR_Wheel)
{
this->LF_Wheel = _LF_Wheel;
this->RF_Wheel = _RF_Wheel;
this->LR_Wheel = _LR_Wheel;
this->RR_Wheel = _RR_Wheel;
}
void Init(void)
{
LF_Wheel->Init(0);
RF_Wheel->Init(1);
LR_Wheel->Init(0);
RR_Wheel->Init(1); //
}
void SetSpd(int Spd)
{
LF_Wheel_Spd = RF_Wheel_Spd = LR_Wheel_Spd = RR_Wheel_Spd = constrain(Spd, -MAX_RPM, MAX_RPM);
}
void ROS_MoveBase(float Line_vel, float Pan_vel, float Angle_vel)
{
Line_vel *= cos(45);
Pan_vel *= sin(45);
LF_Wheel_Spd = constrain((Line_vel - Pan_vel + Angle_vel * 0.25) * 30, -MAX_RPM, MAX_RPM);
RF_Wheel_Spd = constrain((Line_vel + Pan_vel + Angle_vel * 0.25) * 30, -MAX_RPM, MAX_RPM);
LR_Wheel_Spd = constrain((Line_vel - Pan_vel - Angle_vel * 0.25) * 30, -MAX_RPM, MAX_RPM);
RR_Wheel_Spd = constrain((Line_vel + Pan_vel - Angle_vel * 0.25) * 30, -MAX_RPM, MAX_RPM);
}
void ClearOdom()
{
LF_Wheel->clrEncoderPosition();
RF_Wheel->clrEncoderPosition();
LR_Wheel->clrEncoderPosition();
RR_Wheel->clrEncoderPosition();
}
void ReadOdom()
{
Serial.print(RR_Wheel->getEncoderPosition());
Serial.print(", ");
Serial.print(RR_Wheel->getMotorRPM());
Serial.println(", ");
}
void Increment_PID(void)
{
LF_Wheel->Incremental_PID(LF_Wheel_Spd);
RF_Wheel->Incremental_PID(RF_Wheel_Spd);
LR_Wheel->Incremental_PID(LR_Wheel_Spd);
RR_Wheel->Incremental_PID(RR_Wheel_Spd);
}
void Update_PID(float _kp, float _ki, float _kd)
{
LF_Wheel->Update_PID(_kp, _ki, _kd);
RF_Wheel->Update_PID(_kp, _ki, _kd);
LR_Wheel->Update_PID(_kp, _ki, _kd);
RR_Wheel->Update_PID(_kp, _ki, _kd);
}
private:
Motor_Class *LF_Wheel;
Motor_Class *RF_Wheel;
Motor_Class *LR_Wheel;
Motor_Class *RR_Wheel;
int LR_Wheel_Spd;
int RR_Wheel_Spd;
int RF_Wheel_Spd;
int LF_Wheel_Spd;
};모터 4개를 제어하는 코드이다. 여기서 movebase에 위에서 공부한 내용을 넣었다.
단위는 수정해줄 필요가 있다. RPM을 rad/s으로 스스로 바꿔주면 되겠다.
[ref]
- http://faculty.salina.k-state.edu/tim/robotics_sg/Control/kinematics/odometry.html
- https://modernrobotics.northwestern.edu/nu-gm-book-resource/13-4-odometry/
- https://github.com/ROBOTIS-GIT/OpenCR/blob/master/arduino/opencr_arduino/opencr/libraries/turtlebot3/examples/turtlebot3_burger/turtlebot3_core/turtlebot3_core.ino (528번째 줄)
