Paper : Local-to-Global Registration for Bundle-Adjusting Neural Radiance Fields
Abstract
배경
- NeRF(Neural Radiance Fields)는 사실적인 새로운 뷰 합성을 달성했으나 정확한 카메라 포즈에 대한 요구 사항으로 인해 적용이 제한됨
- 신경 3D 표현을 공동으로 학습하고 카메라 프레임을 등록하기 위한 합성별 분석 확장이 존재함에도 불구하고 제대로 초기화되지 않으면 차선책에 취약
제안
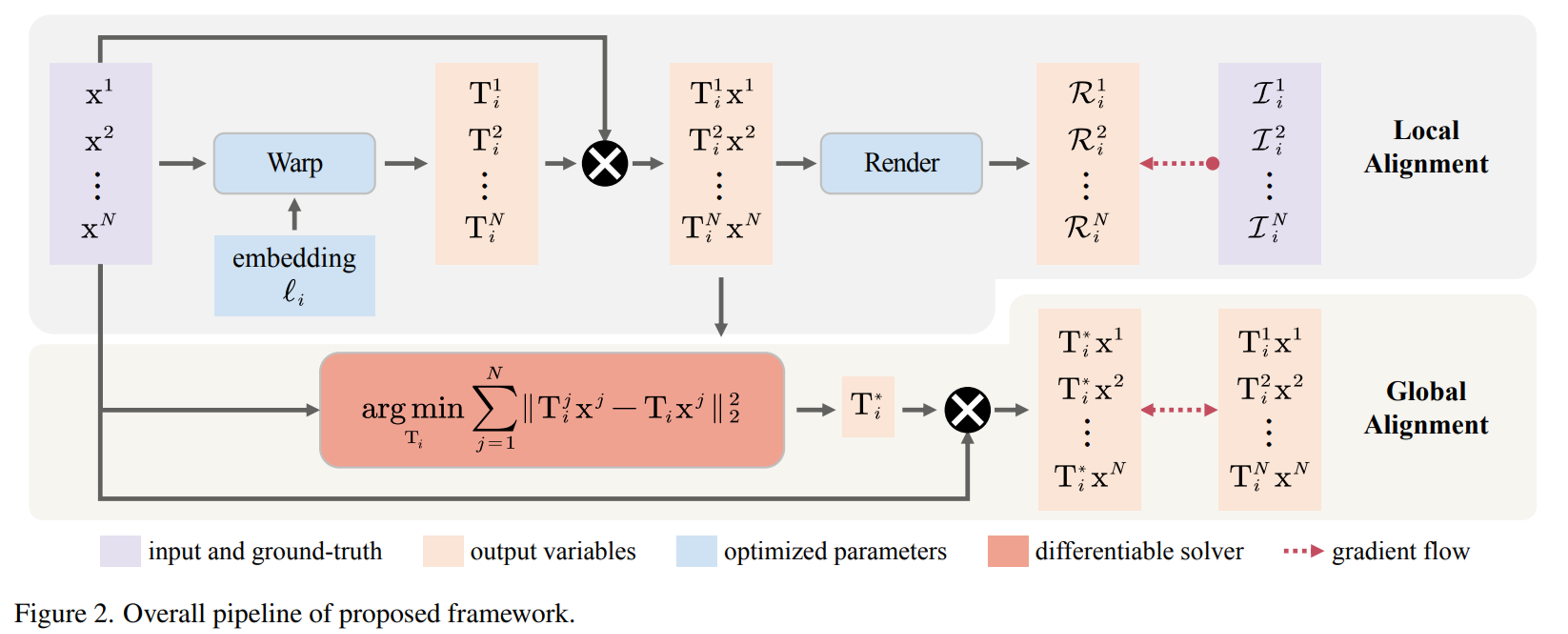
- 번들 조정 Neural Radiance Fields를 위한 로컬-투-글로벌 등록 방법인 L2G-NeRF를 제안
- 픽셀 단위의 유연한 정렬과 프레임 단위의 제한된 파라메트릭 정렬이 이어짐
- 픽셀별 로컬 정렬은 광도 재구성 오류를 최적화하는 심층 네트워크를 통해 감독되지 않는 방식으로 학습
- 프레임별 전역 정렬은 전역 변환을 찾기 위해 픽셀별 대응에 대해 미분 가능한 매개변수 추정 솔버를 사용하여 수행됩니다.
결과
- 합성 및 실제 데이터에 대한 실험을 통해 우리의 방법이 충실도가 높은 재구성 및 대형 카메라 자세 오정렬 해결 측면에서 현재의 최첨단 방법보다 성능이 우수하다는 것을 보여줌
3. Approach
카메라 매개변수와 함께 neural field를 재구성하는 공식을 제시한다. 이미지 세트 {Ii}i=1M이 주어지면 우리는 neural field R의 매개변수 Θ와 렌더링된 이미지와 실제 이미지 사이의 photometric error를 최소화하는 카메라 매개변수 {Ti}i=1M을 공동으로 찾는 것을 목표로 한다. 샘플링된 좌표 {xj}j=1N 에 대한 이미징 함수를 다음과 같이 공식화한다:
{Ti}i=1M,Θmini=1∑Mj=1∑N(∥R(Tixj;Θ)−Ii(xj)∥22).(1)
Gradient-based optimization은 최적이 아닌 카메라 포즈를 찾는 경향이 있다. 따라서 본 논문은 local-to-global registration을 위한 전략을 제안한다. 핵심 아이디어는 photometric reconstruction error를 픽셀별 유연한 정렬을 적용하여 개별적으로 최적화한 다음, 식 1을 확장하여 local geometric transformation을 global로 제한하는 프레임별 정렬을 적용하는 것이다:
{Ti}i=1M,N,Θmini=1∑Mj=1∑N(∥R(Tixj;Θ)−Ii(xj)∥22)+λ∥Tij−Ti∗xj∥22),(3)
- {Tij}i=1,j=1M,N : pixel-wise local transformation으로, frame-dependent embedding {ℓi}i=1M과 함께 Φ로 매개변수화된 warp neural field W에 의해 모델링
Tij=W(xj;ℓi,Φ),(3)
{Ti∗}i=1M 은 픽셀별 대응(pixel-wise correspondences)에 대해 미분 가능한 매개변수 추정 솔버를 사용하여 추정한다:
Ti∗=Tiargminj=1∑N∥Tijxj−Tixj∥22(4)
3.1. Neural Image Alignment (2D)
직관적으로 문제를 정의하기 위해 먼저 2차원에서의 이미지 정렬 문제를 가정해보자. x∈R2 를 2D 픽셀 좌표로 하고 I:R2→R3 이라고 하면 가중치 Θ로 매개변수화된 MLP fR:R2→R3 2D neural field를 최적화하는 것을 목표로 한다.
R(Tx;Θ)=fR(Tx;Θ),(5)
- T=[R∣t]∈ SE(2) 또는 T∈ SL(3)과 같은 geometric transformation parameters
를 해결
- R∈ SO(2) 및 t∈R2 : rigid rotation and translation
- T∈ SL(3) : 각각의 homography transformation matrix
가중치 Φ로 매개변수화된 다른 MLP를 사용하여 frame-dependent embedding ℓ에서 coordinate-based warp neural field fW:R2→R3 조건을 모델링한다:
W(x;ℓ,Φ)=exp(fW(x;ℓ,Φ)),(6)
- exp(·) : Lie algebra se(2) 또는 sl(3)에서 Lie group SE(2) 또는 SL(3)까지의 지수 맵을 나타내며, 이는 gradient-based optimization 동안 최적화된 변환 행렬 T가 Lie group manifold에 놓이도록 함
3.2. Bundle-Adjusting Neural Radiance Fields (3D)
3D NeRF(Neural Radiance Fields)와 카메라 포즈를 동시에 추정하는 문제에 대해 논의한다. 3D 점이 주어지면 네트워크 매개변수를 사용하여 3D 장면을 인코딩하는 MLP fR:R3→R4를 통해 RGB 색상 c∈R3 및 볼륨 밀도 σ∈R을 예측한다.
이는 카메라 뷰 공간에서 NeRF의 렌더링 프로세스를 공식화하는 것부터 시작한다. 픽셀 좌표 u∈R2 의 homogeneous 좌표는 x=[u;1]⊤∈R3로, 깊이 zi에서 ray위의 3D 점은 zix로 표현될 수 있다. 따라서 query quantity는 y=[c;σ]⊤=fR(zix;Θ)이며, 여기서 Θ는 fR의 매개변수이다. 그런 다음 픽셀 위치 x의 렌더링 색상 R은 볼륨 렌더링으로 계산할 수 있다
R(x)=∫znearzfarT(x,z)σ(zx)c(zx)dz,(7)
- T(x,z)=exp(−∫znearzσ(z′x)dz′)
- zfar 및 zfar : 장면의 근거리 및 원거리 깊이 경계
수치적으로 적분 공식은 깊이 {z1,...,zK}의 ray 위의 샘플링된 K개의 점을 사용하여 이산적으로 근사된다. 네트워크 fR은 K번 평가되고, 출력 {y1,...,yK}는 볼륨 렌더링을 통해 합성된다. R(x)이 g(y1,...,yK)로 표현될 수 있도록 미분 가능하고 결정론적인 합성 함수를 g:R4K→R3으로 표시한다.
카메라 포즈는 T=[R∣t]∈ SE(3) (R∈ SO(3) 및 t∈R3)로 매개변수화된다. 다음으로, 3D rigid transformation T를 사용하여 3D 점 zix를 카메라 뷰 공간에서 세계 좌표로 변환하고 픽셀 x의 렌더링 색상을 다음과 같이 공식화한다:
R(Tx;Θ)=g(fR(Tz1x;Θ),...,fR(TzKx;Θ)).(8)
Neural 이미지 정렬과 유사하게 가중치 Φ를 갖는 또 다른 MLP를 사용하여 frame-dependent embedding ℓ과 함께 coordinate-based warp neural field fW:R2→R6를 모델링한다.
W(x;ℓ,Φ)=exp(fW(x;ℓ,Φ)),(9)
- exp(·) : Lie algebra se(3)에서 Lie group SE(3)까지의 지수 맵
IDK
3.3. Differentiable Parameter Estimation
