[Paper Review] Estimating Egocentric 3D Human Pose in the Wild with External Weak Supervision
Human Pose Estimation
Paper : Estimating Egocentric 3D Human Pose in the Wild with External Weak Supervision
Abstract
- 하나의 fisheye 카메라를 이용한 자기 중심 3D 인간 포즈 추정이 최근 상당한 관심
- 기존 방식은 합성 데이터에서만 훈련할 수 있고, 신체 부위가 주변 장면에 의해 가려지거나 상호 작용할 때 실제 이미지의 포즈 추정이 어려움
- Egocentric Poses in the Wild(EgoPW)는 자기 중심 카메라와 외부 카메라로 촬영한 데이터 동기화
- weak external supervision으로 새로운 자기 중심적 자세 추정 방법 제시 : 1) 외부 뷰 감독을 통합하여 시공간 최적화 방법으로 EgoPW 데이터 세트에 대한 pseudo label 생성 2) pseudo label로 자기 중심 포즈 추정 네트워크 훈련
- 사전 학습된 외부 뷰 포즈 추정 모델로 추출한 고품질 feature로 자기 중심적 feature를 감독하는 새로운 학습 전략 제안
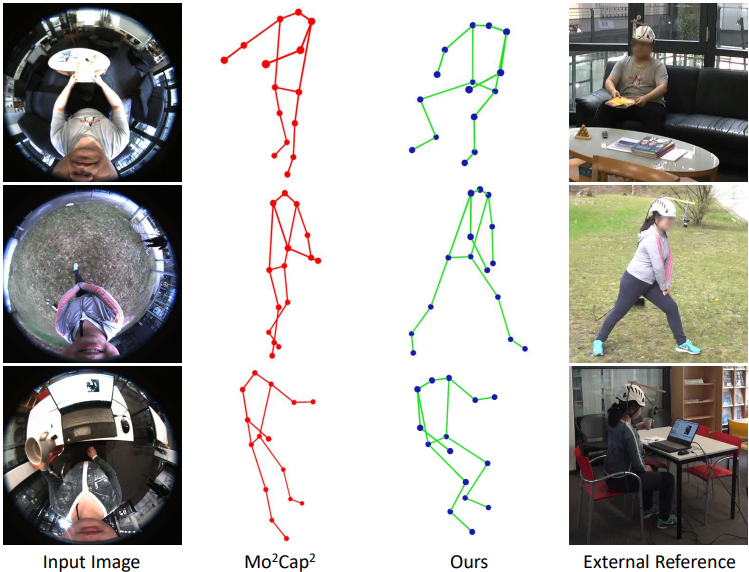
- 단일 자기 중심 이미지에서 정확한 3D 포즈를 예측하고 양적, 질적으로 최첨단 방법 능가

1. Introduction
- 기존 모션 캡처 시스템은 넓은 공간에서는 적용 범위가 제한적이므로, 자기중심적인 모션 캡처 이용
- 자기중심적 모션 캡처 시스템은 이동성이 유연하며 기록 공간 요구 사항 없음
- 웨어러블 의료 모니터링, 스포츠 분석 및 R과 같은 많은 애플리케이션에 대한 광범위한 인간 활동 캡처 가능
- 본 연구는 단일 머리 장착 fisheye 카메라에서 전체 3D 신체 포즈를 추정하는 데 중점
- 가장 관련성이 높은 작업은 MoCap과 R-egoose
- 기존 방법은 합성 이미지에 대해서만 훈련되므로 실제 시나리오에서 상당한 성능 저하
- 인체의 일부가 주변 장면에 의해 가려지거나 상호작용하는 경우 어려움 → 합성 데이터와 실제 데이터 사이의 도메인 격차 및 가림을 처리하는 능력의 제한 때문
- ocentric Poses in the Wild (EgoPW)라는 대규모 야생 자기 중심적 데이터 세트 캡처
- 312k개 이상의 프레임을 포함, 8개의 일상 장면, 20개의 다른 일상 활동
- 네트워크 훈련에 대한 감독을 얻기 위해, 멀티 뷰 카메라 설정을 사용하여 지상 실측 3D 신체 포즈로 훈련 데이터를 캡처하거나 멀티 뷰 약한 감독을 적용하는 것 → 제한된 공간이 있는 환경에서는 비현실적 → 유연성과 3D 정확도 사이의 균형을 고려하여 자기 중심 카메라와 단일 보조 외부 카메라로 구성된 새로운 장치 설정 사용
- 외부 뷰가 자기 중심적 뷰(예: 하체 부분)에서 가려진 영역에 대해 훈련 중에 추가적인 감독을 제공할 수 있음을 보여줌
- 가림을 처리하고 정확한 포즈를 추정하기 위해, 약하게 감독하는 방식으로 새로운 자기 중심적 포즈 추정 방법을 제안
- EgoPW 데이터 세트의 각 프레임에 대해 정확한 3D 포즈를 생성하기 위한 시공간 최적화 방법 제안
- 생성된 포즈는 자기 중심적 포즈 추정 네트워크를 훈련하기 위한 pseudo label로 사용
- 외부 포즈 추정 네트워크에서 추출된 feature를 사용하여 자기 중심 포즈 추정 네트워크의 훈련 촉진
- discriminator를 속여 두 뷰에서 추출된 feature가 유사하도록 함
- EgoPW 데이터 세트 외에도 합성 데이터 세트를 사용하여, 네트워크를 훈련하고 합성 데이터와 실제 데이터 간의 도메인 격차를 최소화하기 위한 도메인 적응 전략 채택
- 특히 신체 관절이 심각하게 막힌 어려운 장면에서 정확한 3D 포즈를 예측할 수 있음을 보여줌
- A large in-the-wild egocentric dataset (EgoPW) captured with a head-mounted fisheye camera and an external camera
- 심각한 가림이 존재할 때 in-the-wild 데이터에서 기존 방법을 크게 능가하는 외부 관점에서 약한 감독으로 자기 중심적 인간 자세를 추정하는 새로운 방법
- 외부 뷰의 감독을 통합하여 야생 자기 중심 데이터 세트에 대한 의사 레이블을 생성하는 새로운 최적화 방법
- 외부 특징 표현으로 자기 중심 이미지의 특징 표현을 학습하여 네트워크를 훈련하는 적대적 방법
3. Method
- 자기 중심 및 외부 관점에서 약한 감독으로 야생 데이터 세트를 이용해 신경망을 훈련시키는 새로운 접근 방식 제안
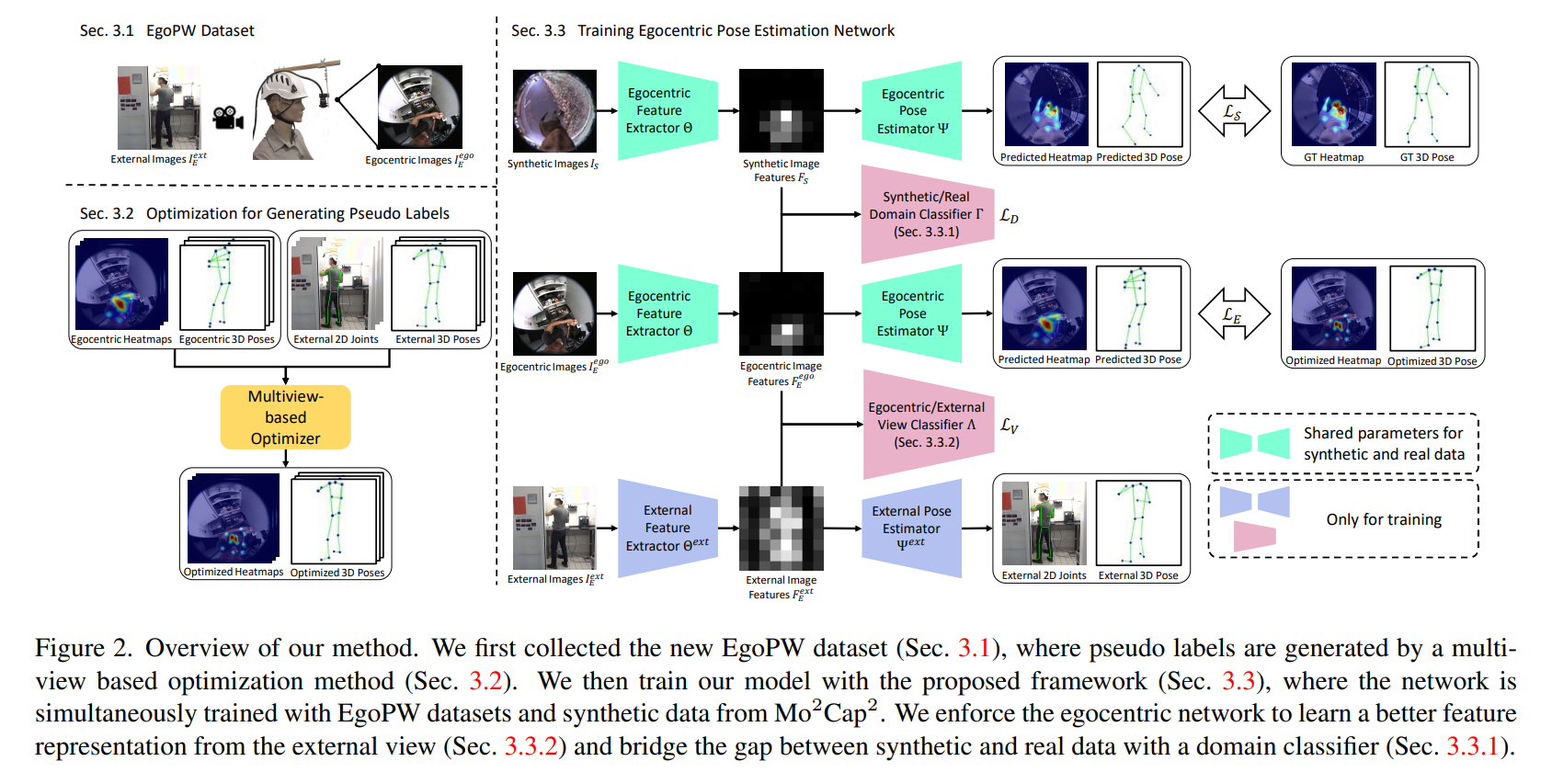
- 동기화된 자기 중심 및 외부 이미지 시퀀스를 포함하는 EgoPW Dataset 수집
- 멀티뷰 기반 최적화 프레임워크를 사용하여 EgoPW 데이터 세트에 대한 pseudo label 생성
- 자기 중심 이미지 와 외부 이미지 의 프레임이 있는 time window에서 시퀀스를 입력으로 받아들이고, 자기 중심 3D 포즈 를 pseudo label로 출력
- MoCap의 합성 데이터와 유사 레이블 이 있는 EgoPW 로 egocentric pose estimation network 훈련
- 기성 외부 포즈 추정 네트워크의 feature 표현을 활용하여 자기 중심적 네트워크를 adversarial 방식으로 더 나은 feature 표현 학습
- 합성 데이터 세트와 실제 데이터 세트 사이의 도메인 격차를 완화하기 위해 adversarial domain adaptation 전략 사용
EgoPW Dataset
- 자기 중심 카메라와 외부 카메라(Sony RX0) 동기화
- 318k 프레임, 20개의 의상 스타일에서 20개의 다른 동작을 수행하는 10명의 배우의 97개 시퀀스
- 자기 중심적 이미지와 외부 이미지를 사용하여 유사 레이블로 3D 포즈를 생성
Optimization for Generating Pseudo Labels
- EgoPW에 대한 pseudo label을 생성하기 위해 기반한 최적화 방법
- 시퀀스가 주어지면, 그것을 연속 프레임을 포함하는 세그먼트로 나눔
- 자기 중심 프레임 : MoCap 방법을 사용하여 3D pose(egocentric pose)와 2D heatmap 추정
- 3D pose : (15개의 joint 위치)
- 2D heatmap :
- transform matrix : ORB-SLAM2를 사용하여 인접한 두 프레임의 자기 중심적 카메라 포즈 사이의 변환 추정
- 인접한 두 프레임 :
- 외부 프레임 : VIBE를 사용하여 3D pose(external pose)를, openpose를 사용하여 2D joint 추정
- 3D pose :
- 2D joint :
- CNN 기반 인코더 및 디코더 로 구성된 sequential VAE로 자기 중심적 동작을 인코딩하기 위한 잠재 공간 학습
- 해당 포즈 시퀀스 가 목적 함수를 최소화하도록 잠재 벡터 를 찾아 자기 중심적 포즈 최적화:
- : egocentric reprojection term, egocentric pose regularization term, motion smoothness regularization term, bone length regularization term
- : external reprojection term, external 3D body pose regularization term, camera pose consistency term, and camera matrix regularization term
- 각 프레임에 대한 외부 카메라 포즈(회전과 변환)에 대한 상대적인 자기 중심적인 카메라 포즈 최적화 필요
External Reprojection Term
- 외부 2D 포즈로 최적화 프로세스를 감독하기 위해 외부 2D joint와 투영된 3D 포즈 간의 차이를 최소화하는 외부 재투영 :
- : intrinsic matrix of the external camera
- : pose of the egocentric camera in the th frame(w.t.r. external camera position)
- : egocentric body pose
- 투영된 신체 포즈를 openpose에 의해 추정된 2D joint와 비교
- 최적화 초기에 외부 카메라와 자기 중심 카메라 사이의 상대적 포즈를 알 수 없기 때문에, 를 최적화하면서 동시에 를 최적화
- 최적화 과정이 속도를 위해, perspective-n-Point algorithm을 사용하여 자기 중심적 카메라 포즈 초기화
Camera Pose Consistency
-
external reprojection term만으로는 정확한 3D 포즈를 얻을 수 없음
-
자기중심적 카메라 포즈와 최적화된 신체 포즈의 external reprojection constraint을 violation하지 않고 임의로 변경될 수 있는 모호성을 완화하기 위한 카메라 일관성 term :
-
번째 프레임에서 자기 중심 카메라 포즈를 번째 프레임과의 상대 포즈로 변환하여 얻은 포즈와 일치하도록 함
External 3D Body Pose Regularization
- 자기 중심적인 3D 신체 포즈의 최적화를 감독하기 위해 외부 3D 신체 포즈 사용
- rigid 정렬 후 외부 신체 포즈와 자기 중심적 신체 포즈의 차이를 측정하는 term :
- : transformation matrix calculated with Procrustes analysis
Procrustes analysis
Shape 집합의 분포를 분석하는 방법
- 자기 중심적 관점과 외부 관점에서 추정된 신체 자세를 결합하여 보다 정확한 의사 레이블을 재구성
- 두 관점의 정보를 결합함으로써, 우리는 의사 레이블로서 정확한 3D 포즈를 성공적으로 예측
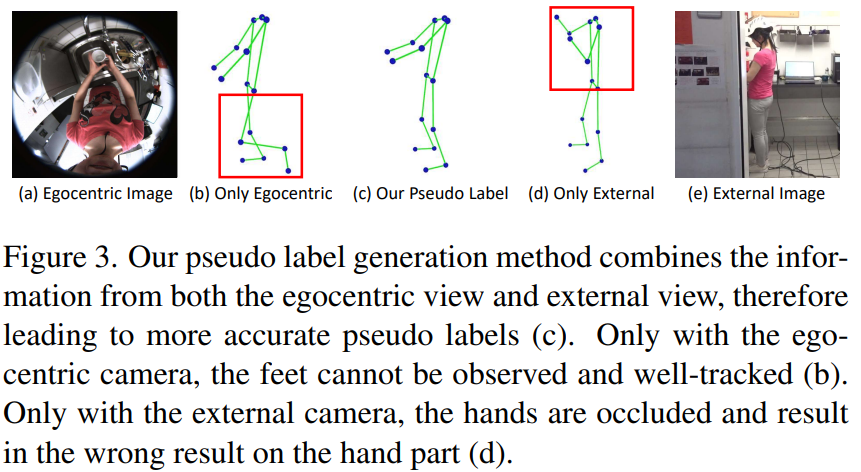
- 외부 카메라가 의사 레이블을 생성하는 데만 사용되며, 테스트 시에는 자기 중심 카메라만 사용
Camera Matrix Regularization
- 카메라 회전 행렬 가 직교하도록 제한:
- 이전 연구와 달리, 시공간 최적화 방법은 사전에 학습된 동작의 안내에 따라 pseudo label을 생성 → 노이즈가 많고 부정확한 자기 중심 2D 포즈 추정에 강력
Training Egocentric Pose Estimation Network
-
3.2절의 최적화 프레임워크를 통해 EgoPW 데이터 세트의 각 자기 중심 프레임에 대한 정확한 3D 포즈 유사 레이블 Pegoseq를 얻을 수 있으며, 이는 보충 자료에 설명된 fisheye 카메라 모델로 2D 열 지도 HE와 관절과 자기 중심 카메라 DE 사이의 거리로 추가로 처리
-
MoCap의 합성 데이터 세트와 EgoPW 데이터 세트 모두에서 단일 이미지 기반 자기 중심적 포즈 추정 네트워크를 훈련
-
합성 이미지 를 포함한 합성 데이터 세트 와 MoCap 데이터 세트의 heatmap 및 거리 레이블 , pseudo heatmap , 거리 레이블 및 외부 이미지 를 포함하는 EgoPW 데이터 세트 E에 주목한다
-
두 개의 reconstruction loss term과 두 개의 adversarial loss term으로 자기 중심적 자세 추정 네트워크를 훈련
- reconstruction loss : 예측된 heatmap/거리와 레이블의 heatmap/거리 사이의 평균 제곱 오차(MSE)로 정의
- adversarial loss : 자기 중심적 feature 표현을 학습하고 합성 데이터 세트와 실제 데이터 세트 사이의 도메인 격차를 메우기 위해 별도로 설계
- : 이미지를 feature 벡터로 인코딩하는 feature extractor
- : feature 벡터를 2D heatmap 및 거리 벡터로 디코딩하는 pose estimator
- reconstruction loss : 예측된 heatmap/거리와 레이블의 heatmap/거리 사이의 평균 제곱 오차(MSE)로 정의
Adversarial Domain Adaptation
- 합성 데이터와 실제 데이터 사이의 도메인 격차를 해소하기 위해 이미지에서 추출된 feature 벡터를 입력으로 사용
- 해당 feature가 실제 이미지에서 추출되는지 여부를 결정하는 adversarial discriminator 도입
- adversarial discriminator 는 교차 엔트로피 손실로 훈련:
- discriminator 가 훈련되면 feature extractor 는 discriminator 가 feature가 합성 이미지에서 추출되었는지 실제 이미지에서 추출되었는지 구별할 수 없도록 서로 다른 도메인의 이미지를 동일한 feature 공간에 매핑
- pose estimator 는 야생 데이터에 대해 더 정확한 포즈를 예측
Supervising Egocentric Feature Representation with External View
- 데이터 세트의 정체성 변형은 기존의 대규모 외부 뷰 인간 데이터 세트(수천 개의 정체성)에 비해 상대적으로 제한적(20개의 정체성)
- 네트워크의 일반화 가능성을 향상시키고 학습 정체성에 과적합되는 것을 방지 → 고품질의 3인칭 시점 feature를 활용하여 자기 중심적 표현을 감독 것을 제안
- transfer learning 관점에서, 자기중심적 네트워크가 MoCap 데이터로 사전 학습되었지만, 합성 데이터 세트에서 fine tuning되는 동안 학습된 지식을 쉽게 "잊을" 수 있음
- 3인칭 시점 feature의 감독은 자기 중심적 feature가 대규모 실제 인간 이미지에서 학습된 것과 너무 많이 차이나는 것을 방지
- 자기 중심 feature 와 외부 feature 사이의 거리를 직접적으로 최소화하는 것은 성능을 향상시키지 못함
-
시야 방향과 카메라 왜곡에 대한 상당한 차이로 인해 자기중심적 관점과 외부 관점의 중간 특징이 서로 달라야 하기 때문에
→ 적대적 훈련 전략을 사용하여 자기 중심 및 외부 네트워크의 feature 표현을 정렬
-
자기 중심 이미지와 해당하는 야생 이미지에서 추출된 feature 벡터를 취하고 feature가 자기 중심 이미지인지 외부 이미지인지 예측하는 adversarial discriminator 를 사용
-
adversarial discriminator 는 교차 엔트로피 손실로 훈련 :
- : 자기중심적 포즈 추정 네트워크와 정확히 동일한 아키텍처를 공유하는 외부 포즈 추정 네트워크의 feature extractor
- features extractor와 pose estimator의 매개변수는 사전 훈련된 모델에서 얻어지며 훈련 과정 동안 고정
-
- 포즈 추정 네트워크의 심층 레이어는 일반적으로 인체의 전역 의미 정보를 나타냄
- ResNet-50 네트워크의 4번째 res-block의 출력 feature를 discriminator 의 입력으로 사용
- joint의 공간적 위치는 자기 중심 관점과 외부 관점에서 상당히 다르므로 discriminator 는 자기 중심 feature와 외부적 feature의 차이를 쉽게 알 수 있음
- discriminator 의 평균 pooling 레이어를 사용하여 feature을 공간적으로 집계함으로써 자기 중심적 이미지와 외부 이미지 사이의 공간 분포의 영향을 더욱 제거
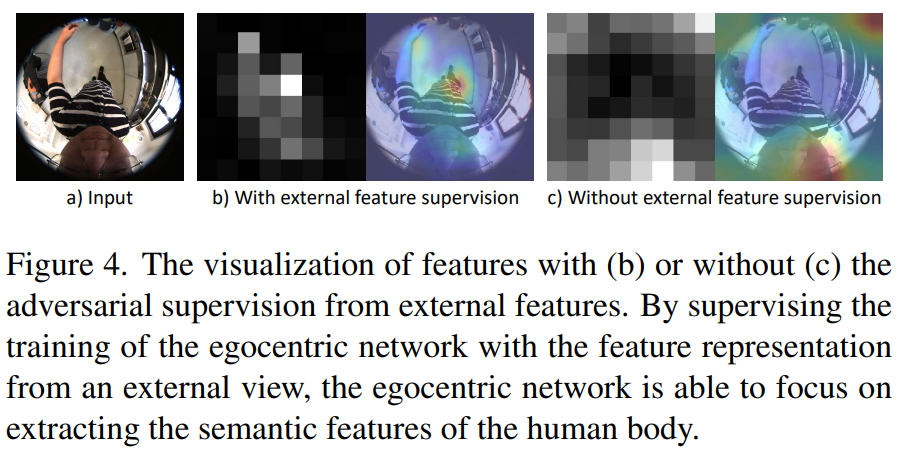
- 학습 과정에서 자기중심적 자세 추정 네트워크는 feature가 자기중심적 이미지인지 외부 이미지인지 구별할 수 없도록 도메인 discriminator 를 속이기 위해 feature 를 생성하도록 훈련
- 자기 중심 네트워크는 입력 이미지의 관련 부분, 즉 인체에 더 많은 주의를 기울이는 방법을 학습
- 자기 중심 네트워크는 입력 이미지의 관련 부분, 즉 인체에 더 많은 주의를 기울이는 방법을 학습
Conclusions
- 단일 헤드 마운트 어안 카메라를 사용하여 자기 중심적 인간 포즈 추정에 대한 새로운 접근 방식을 제안
- 새로운 야생 자기 중심 데이터 세트(EgoPW)를 수집하고 의사 레이블로 정확한 자기 중심 포즈를 생성하기 위한 새로운 최적화 방법을 설계
- 의사 레이블과 외부 네트워크의 기능을 사용하여 자기 중심적 자세 추정 네트워크를 감독
- 실험에 따르면 우리의 방법은 질적으로나 양적으로 모든 최첨단 방법을 능가하며 심각한 폐색 상태에서도 잘 작동
- 향후 연구로, 우리는 야생 비디오에서 시간적으로 일관된 자기 중심적 자세를 추정하기 위한 비디오 기반 방법을 개발
Limitations
- 우리 방법에서 유사 레이블의 정확성은 하나의 자기 중심적 뷰와 하나의 외부 뷰만 포함하는 야생 내 캡처 시스템에 의해 제약을 받으며, 네트워크의 성능을 더욱 제약 → 미래의 솔루션 중 하나는 IMU와 깊이 카메라를 포함한 다양한 센서를 융합하여 야생 데이터 세트를 캡처
