다익스트라 최단 경로 알고리즘은 그래프에서 여러 개의 노드가 있을 때, 특정 노드에서 출발하여 다른 노드로 가는 각각의 최단 경로를 구해주는 알고리즘이다.
해당 알고리즘은 '음의 간선'이 없을 때 정상적으로 동작한다.
이는 실제로 GPS 소프트웨어의 기본 알고리즘으로 채택되곤 한다.
다익스트라 최단 경로 알고리즘은 기본적으로 그리디 알고리즘으로 분류된다.
매번 '가장 비용이 적은 노드를' 를 선택해서 임의의 과정을 반복하기 때문이다.
1. 출발 노드를 설정한다.
2. 최단 거리 테이블을 초기화한다.
3. 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택한다.
4. 해당 노드를 거쳐 다른 노드로 가는 비용을 계산하여 최단 거리 테이블을 갱신한다.
5. 3, 4번 과정을 반복한다.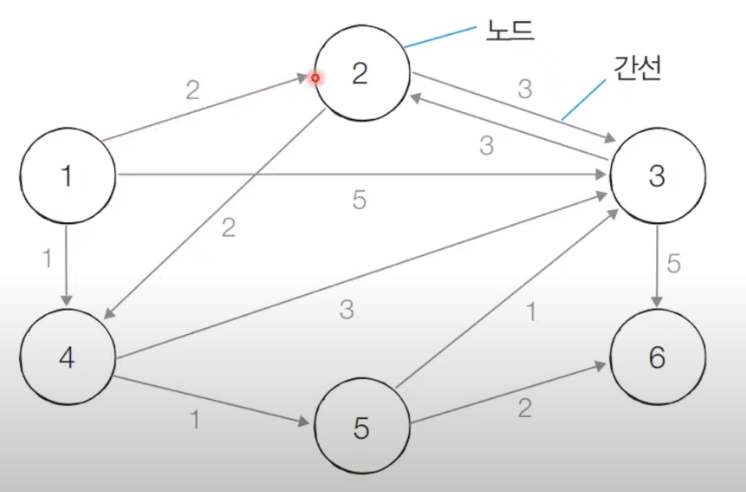 위의 그림에서 출발 노드를 1이라 하자. 1번 노드부터 2 ~ 6번 노드까지의 최단 거리를 각각 알아보자.
위의 그림에서 출발 노드를 1이라 하자. 1번 노드부터 2 ~ 6번 노드까지의 최단 거리를 각각 알아보자.
2번 과정에 의해, 우선 최단 거리 테이블을 모두 '무한'으로 초기화한다.
3번 과정에 의해, 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드인 1번 노드를 선택한다.
4번 과정에 의해, 선택된 1번 노드를 거쳐 출발 노드인 1번 노드에서부터의 비용을 각각 계산하여 최단 거리 테이블을 갱신한다.
 3번 과정에 의해, 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드인 4번 노드를 선택한다.
3번 과정에 의해, 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드인 4번 노드를 선택한다.
4번 과정에 의해, 선택된 4번 노드를 거쳐 출발 노드인 1번 노드에서부터의 비용을 각각 계산하여 최단 거리 테이블을 갱신한다. (이 때, 기존의 값보다 비용이 적은 경우에만 업데이트 한다.)
 4번 노드를 거쳐 간 덕분에, 1번 노드에서부터 5번 노드까지 2의 비용으로 갈 수 있게 되었다.
4번 노드를 거쳐 간 덕분에, 1번 노드에서부터 5번 노드까지 2의 비용으로 갈 수 있게 되었다.
위의 과정을 반복하여 최단 거리 테이블을 계산하면, 1번 노드로부터 각각의 노드까지의 최단 거리를 계산할 수 있다.
우선순위 큐
다익스트라 알고리즘은 힙(Heap) 자료구조를 사용한다.
힙 자료구조는 우선순위 큐를 구현하기 위해 사용되는 자료구조 중 하나이다.
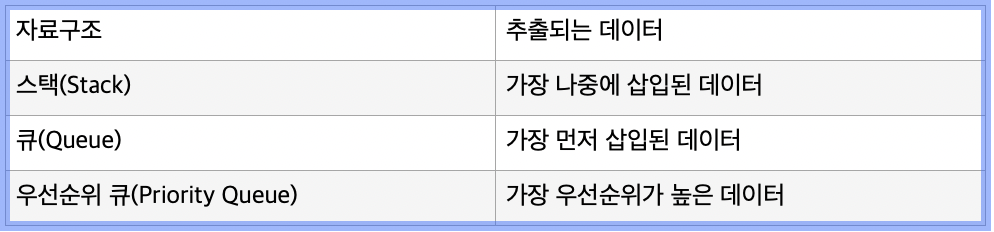
우선순위 큐는 우선순위가 가장 높은 데이터를 가장 먼저 삭제한다는 점이 특징이다.
 파이썬에서는 우선순위 큐가 필요할 때 PriorityQueue 혹은 heapq를 사용할 수 있는데, 일반적으로 heapq가 더 빠르게 동작하기 때문에 수행 시간이 제한된 상황에서는 heapq를 사용하는 것을 권장한다.
파이썬에서는 우선순위 큐가 필요할 때 PriorityQueue 혹은 heapq를 사용할 수 있는데, 일반적으로 heapq가 더 빠르게 동작하기 때문에 수행 시간이 제한된 상황에서는 heapq를 사용하는 것을 권장한다.
대부분의 프로그래밍 언어에서는 우선순위 큐 라이브러리에 데이터의 묶음을 넣으면, 첫 번째 원소를 기준으로 우선순위를 설정한다.
(가치, 물건)으로 구성된 데이터 -> '가치' 값이 우선순위 값이 된다.
우선순위 큐를 구현할 때는 내부적으로 최소 힙 또는 최대 힙을 이용하는데, 파이썬 라이브러리에서는 기본적으로 값이 낮은 데이터가 먼저 삭제되는 최소 힙 구조 를 이용한다.
다익스트라 최단 경로 알고리즘에서는 비용이 적은 노드를 우선하여 방문하므로 최소 힙 구조를 기반으로 하는 파이썬의 우선순위 큐 라이브러리를 그래도 사용하면 적합하다.
우선순위 큐는 단순히 리스트를 이용해서 구현할 수도 있는데, 리스트를 이용해서 우선순위 큐의 기능을 구현한다면, 삭제할 때마다 모든 원소를 확인해서 우선순위가 가장 높거나 낮은 것을 찾아야하므로 최악의 경우 O(N)의 시간 복잡도를 가진다.
 모든 데이터를 넣었다 꺼내는 경우, 힙 자료구조를 이용하면 O(NlogN) 시간이 소요되고, 이는 힙 정렬의 원리이다.
모든 데이터를 넣었다 꺼내는 경우, 힙 자료구조를 이용하면 O(NlogN) 시간이 소요되고, 이는 힙 정렬의 원리이다.
최소 힙을 적용한 다익스트라 알고리즘
우선순위 큐를 사용한 다익스트라 알고리즘의 시간 복잡도는 O(ElogV) 이다.
여기서 V는 노드의 개수이고, E는 간선의 개수를 의미한다.
1번 노드가 출발 노드인 경우를 고려해보자.
우선 출발 노드를 제외한 모든 노드까지의 최단 거리가 '무한'인 최단 거리 테이블을 세팅한다.
다음으로, 우선순위 큐에 아직 방문하지 않은 노드 중 거리가 가장 짧은 1번 노드에 대한 정보를 우선순위 큐에 삽입한다. (거리: 0, 노드: 1)
우선순위 큐에서 노드를 꺼낸 뒤 해당 노드를 이미 처리한 적이 있다면 무시하고, 아직 처리하지 않은 노드에 대해서, 해당 노드를 거쳐 각각의 노드로 가는 비용을 계산하여 최단 거리 테이블을 갱신한다.
만약 더 짧은 경로를 찾아 최단 거리 테이블이 갱신된 노드가 있다면, 그 노드들에 대한 정보를 모두 우선순위 큐에 삽입한다.
그 후, 위의 과정을 반복한다.
1. 출발 노드를 설정한다.
2. 최단 거리 테이블을 초기화한다. (출발 노드까지의 거리는 0, 나머지 노드까지의 거리는 무한)
3. 우선순위 큐에 출발 노드에 대한 정보인 (거리: 0, 노드: 출발 노드) 튜플을 삽입하고 꺼내어,
해당 노드를 거쳐 각각의 노드까지의 최단 거리를 계산하여 최단 거리 테이블을 갱신한다.
4. 최단 거리 테이블이 갱신된 노드에 대한 정보를 우선순위 큐에 모두 삽입하고, 하나를 꺼내어
해당 노드를 거쳐 각각의 노드까지의 최단 거리를 계산하여 최단 거리 테이블을 갱신한다.
5. 위의 과정 반복해당 알고리즘은 코드를 통해 이해하는 것이 더 쉬우니 아래 코드를 참고하자.
import heapq
INF = int(1e9) # 무한을 의미하는 값으로 10억 설정
# 노드의 개수, 간선의 개수를 입력받기
n, m = map(int, input().split())
# 시작 노드 입력 받기
start = int(input())
# 각 노드에 연결되어 있는 노드에 대한 정보를 담는 리스트 만들기
graph = [[] for i in range(n+1)] # 2차원 배열
# 최단 거리 테이블을 모두 무한으로 초기화
distance = [INF] * (n+1)
# 모든 간선 정보를 입력받기
for _ in range(m):
a, b, c = map(int, input().split())
# a번 노드에서 b번 노드로 가는 비용이 c라는 의미
graph[a].append([b, c])
# 우선 순위 큐 사용 (visited 테이블, get_smallest_node 함수 사용 x)
def dijkstra(start_node):
q = []
# 시작 노드로 가기 위한 최단 경로는 0으로 설정하여, 큐에 삽입
heapq.heappush(q, (0, start_node))
distance[start_node] = 0
while q: # 큐가 비어있지 않다면
# 가장 최단 거리가 짧은 노드에 대해 정보 꺼내기
dist, now = heapq.heappop(q)
# 현재 노드가 이미 처리된 적이 있는 노드라면 무시
if distance[now] < dist:
continue
# 현재 노드와 연결된 다른 인접한 노드들 확인
for next_node, next_cost in graph[now]:
cost = dist + next_cost
# 현재 노드를 거쳐서, 다른 노드로 이동하는 거리가 더 짧은 경우
if cost < distance[next_node]:
distance[next_node] = cost
heapq.heappush(q, (cost, next_node))
# 다익스트라 알고리즘 수행
dijkstra(start)
# 모든 노드로 가기 위한 최단 거리 출력
for i in range(1, n+1):
# 도달할 수 없는 경우, 무한이라고 출력
if distance[i] == INF:
print("INFINITY")
else:
print(distance[i])해당 알고리즘은 코드로 원리를 이해하기가 더 쉽고, 암기의 필요성이 다분하니 될 수 있으면 자주 봐서 외워두자!
참고
해당 블로그는 나동빈님의 '이것이 취업을 위한 코딩 테스트다. with 파이썬' 교재와 유튜브 강의를 참고하여 작성되었습니다.
