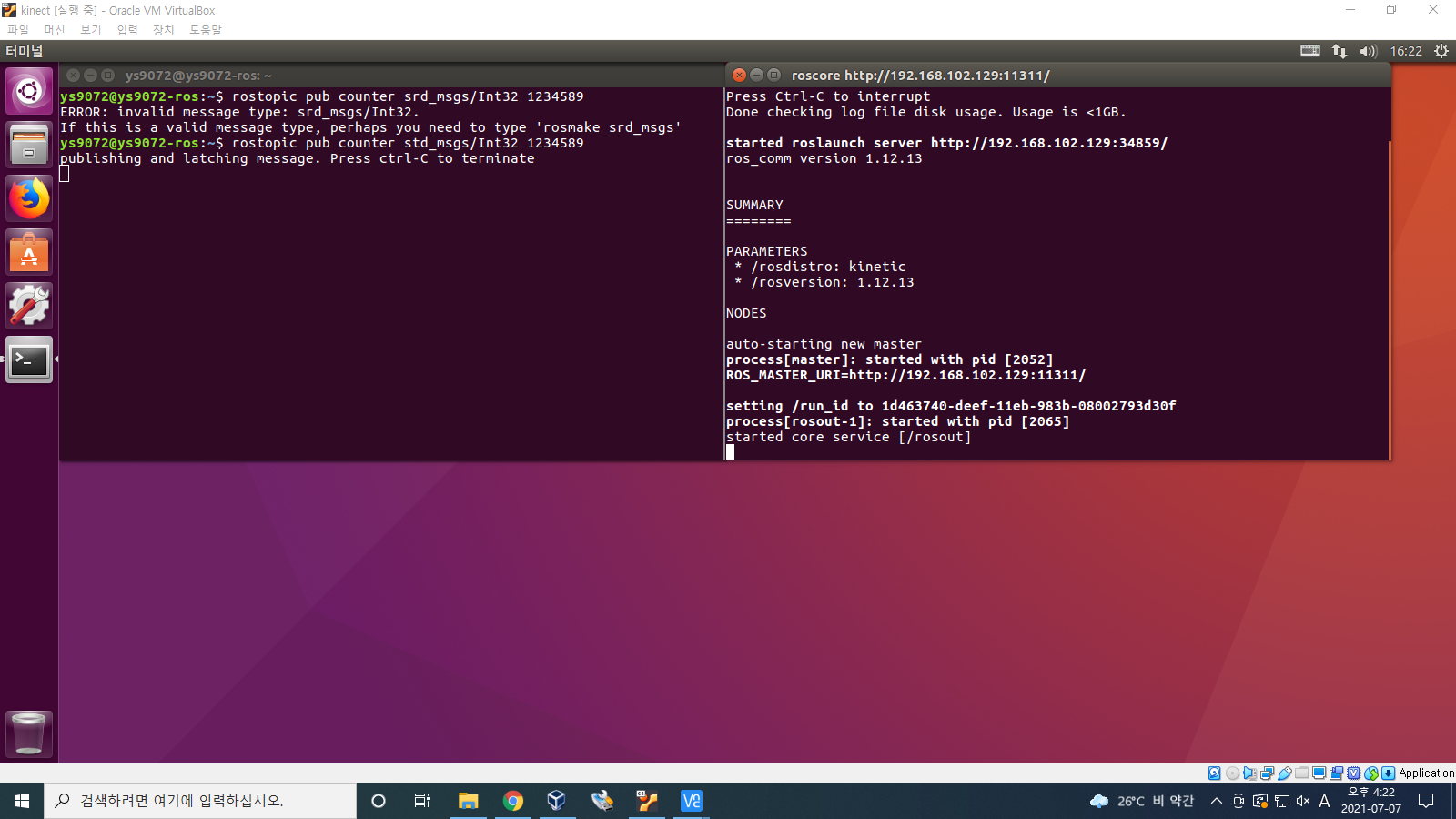
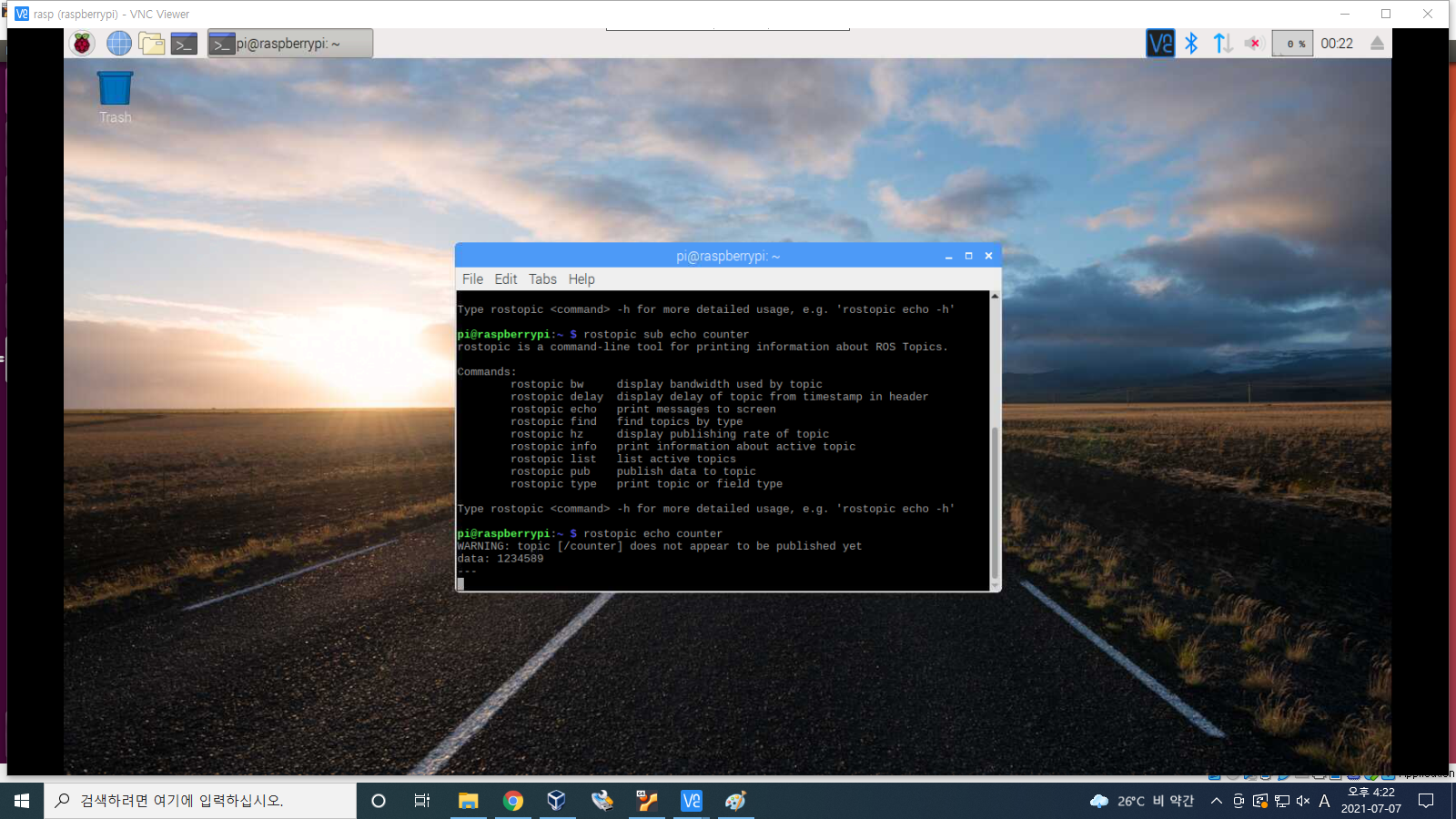
ros를 이용해서 우분투와 라즈베리파이를 연결함(roscore는 우분투에만 켜져있음)
rviz 키는 법
roscore
rosrun basics keys_to_twist_with_ramps.py ./keys_to_twist_with_ramps.py cmd_vel:=cmd_vel_mux/input/teleop
rosrun basics key_publisher.py
roslaunch turtlebot_gazebo turtlebot_world.launch
rosrun rviz rviz
(setup.bash)
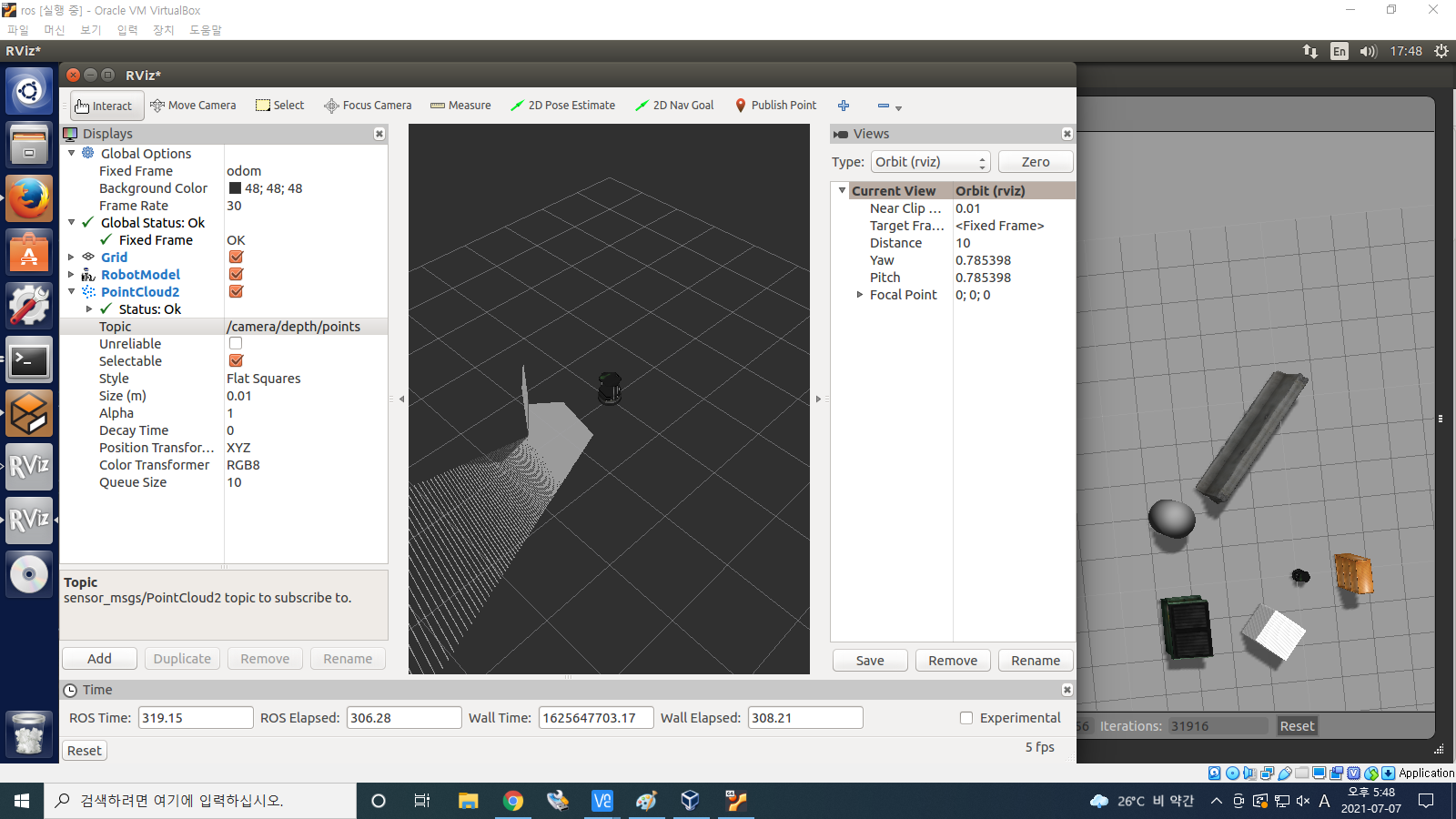
RVIZ setting
After rosrun rviz rviz, map -> odom
Next, Add button -> Robot Model
Next, Add button -> Point Cloud2(Depth Camera)(topic : /camera/depth/points) rviz mouse click
Next, Add button -> Laserscan(laser)(topic : /scan) rviz mouse click // It can not use two sensor

JH.velog