*강사님 github**
https://github.com/katebrighteyes/jetson_ros_melodic
CAN
can link를 사용해서 정보를 주고 받는 연습
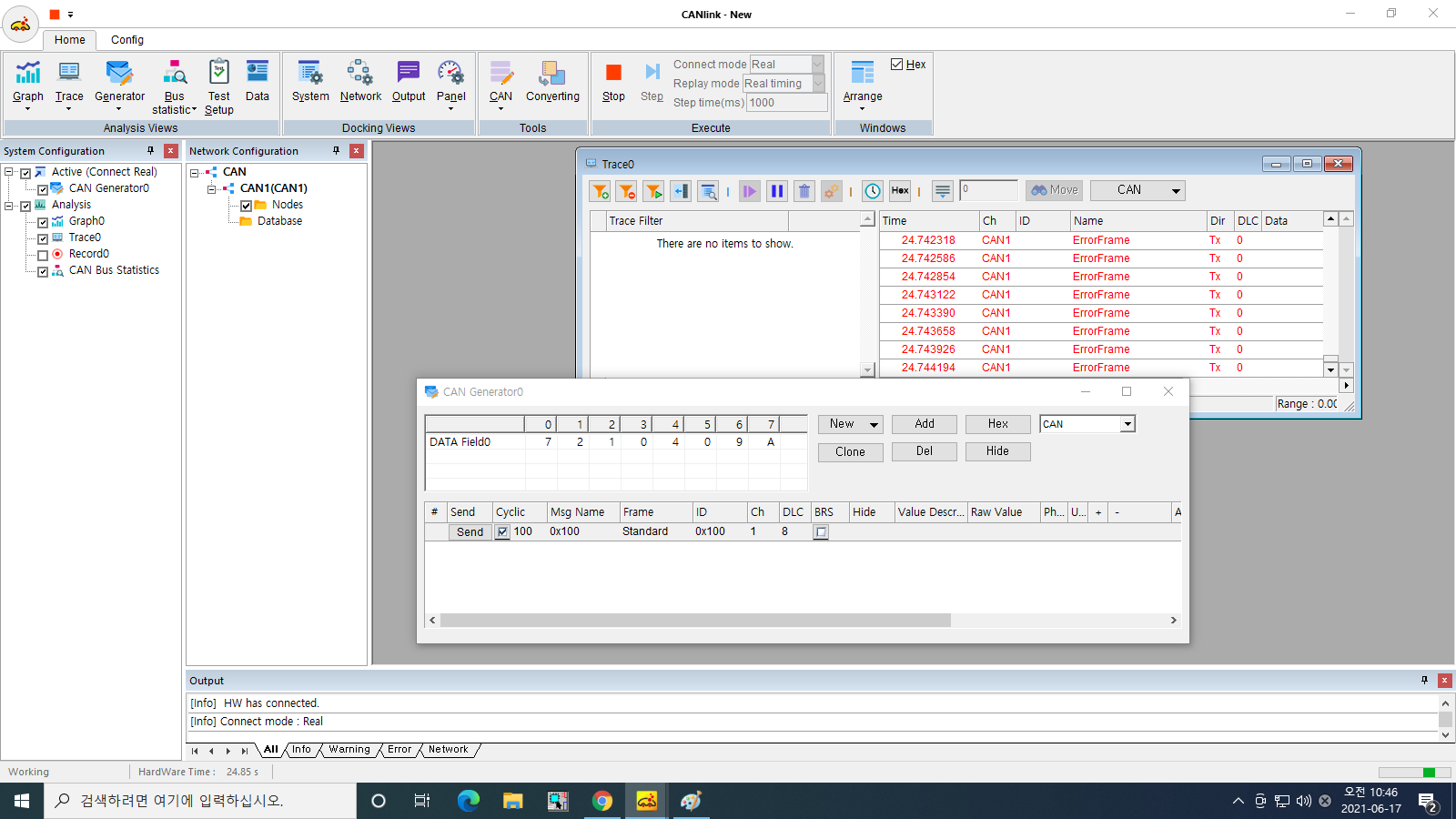
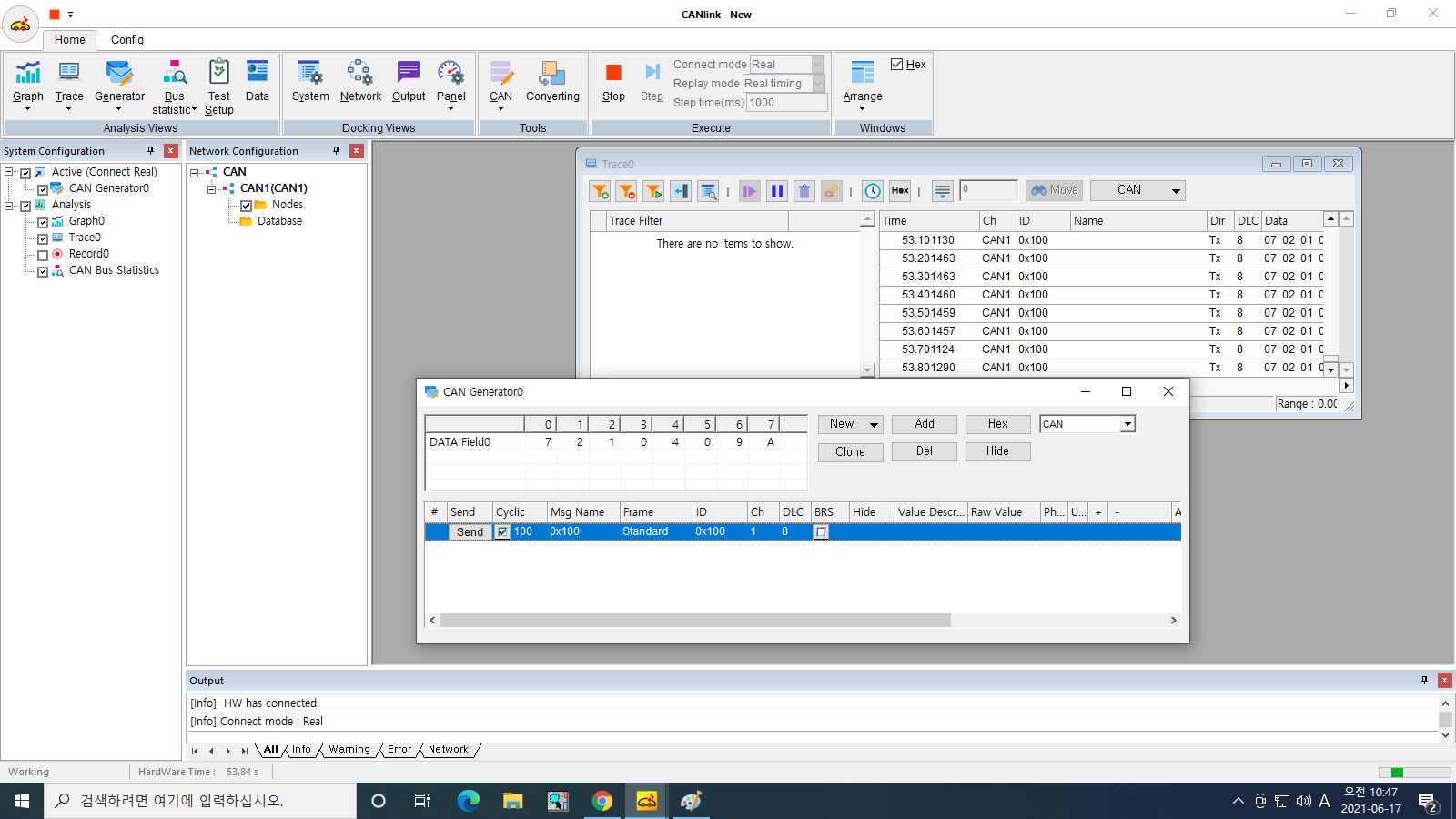

CAN1 : send
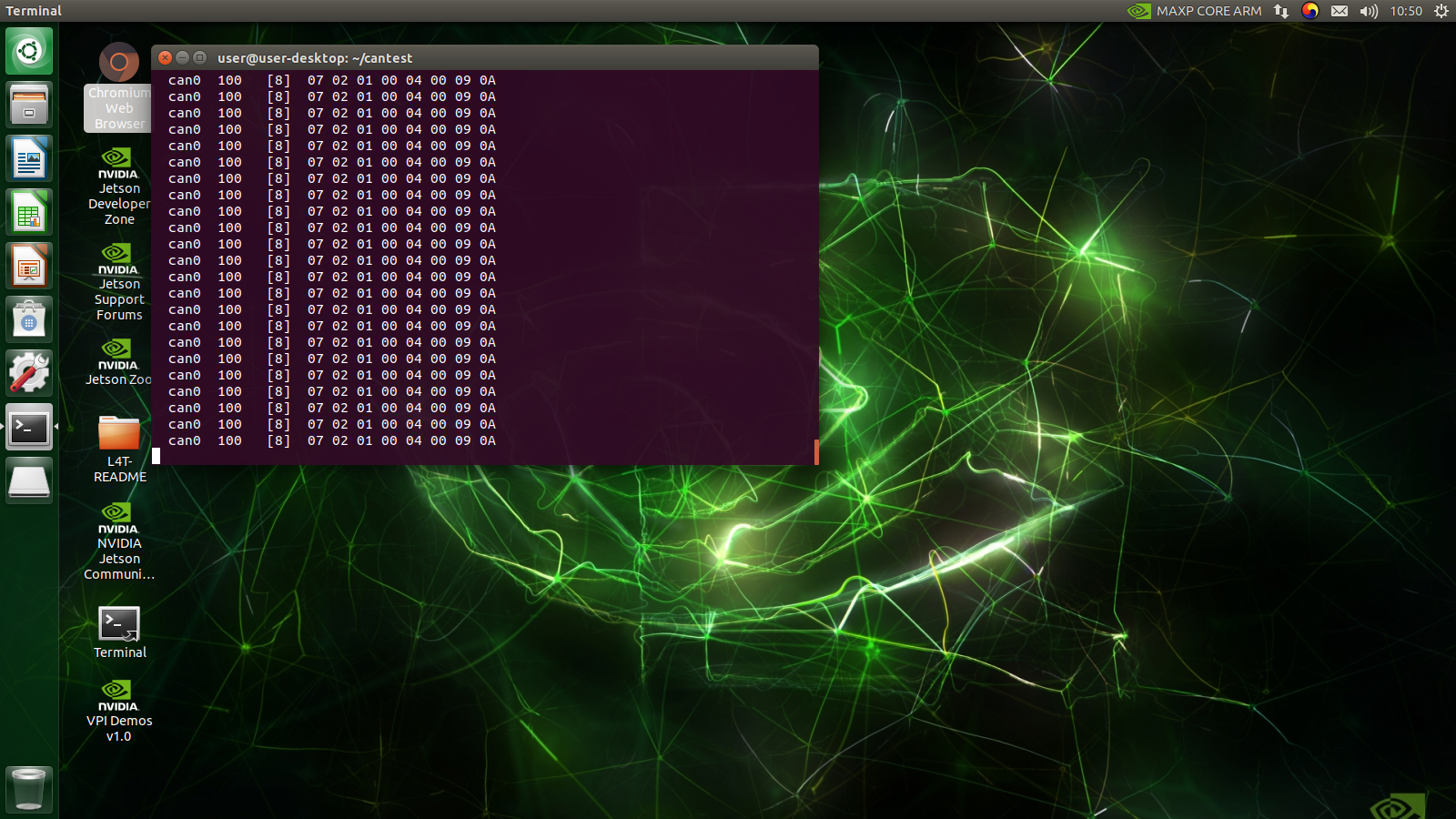
CAN2 : receive
로 받아서 사용
cantest
1씩 더해서 돌려주기
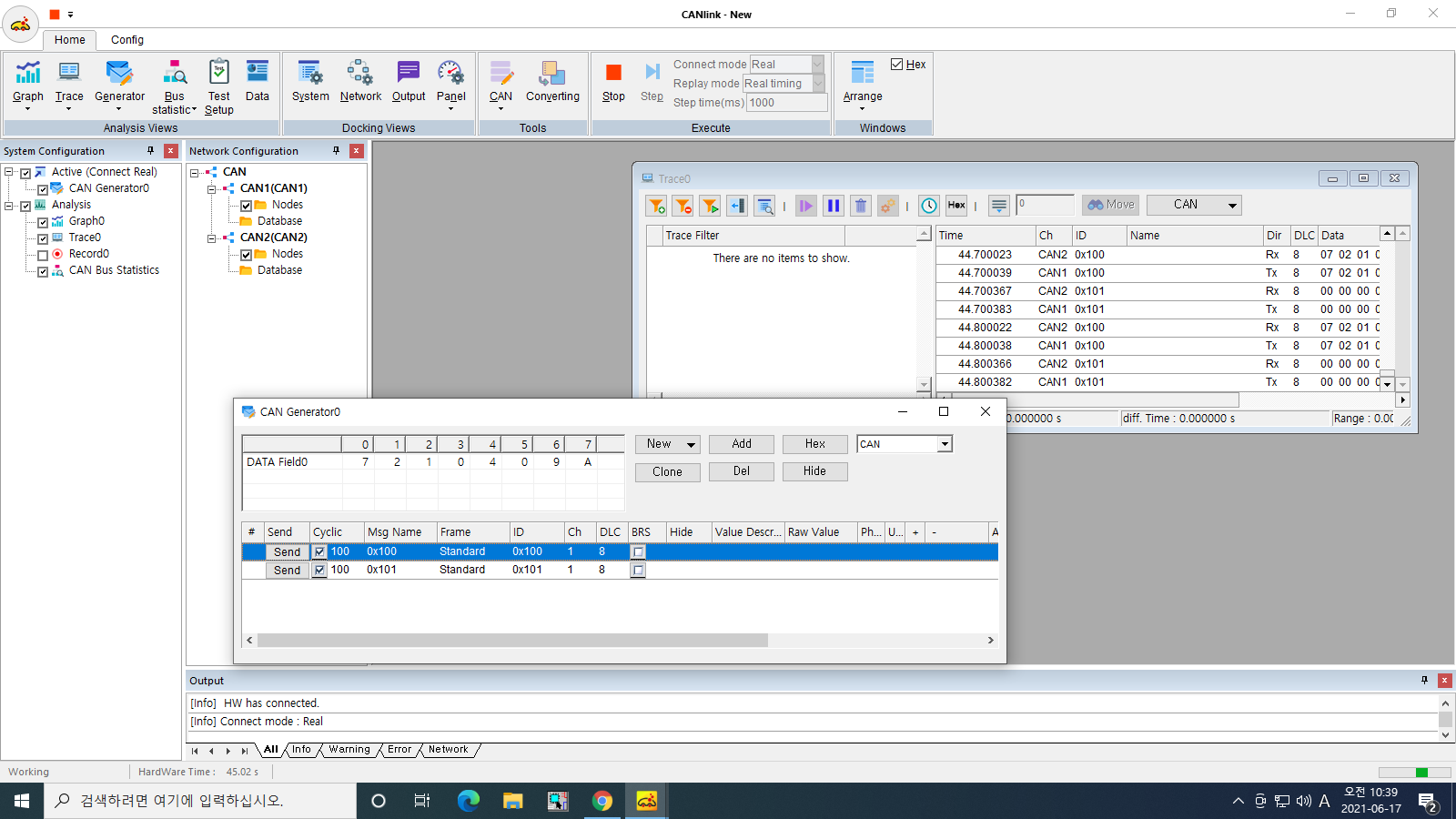
통신 주고받기
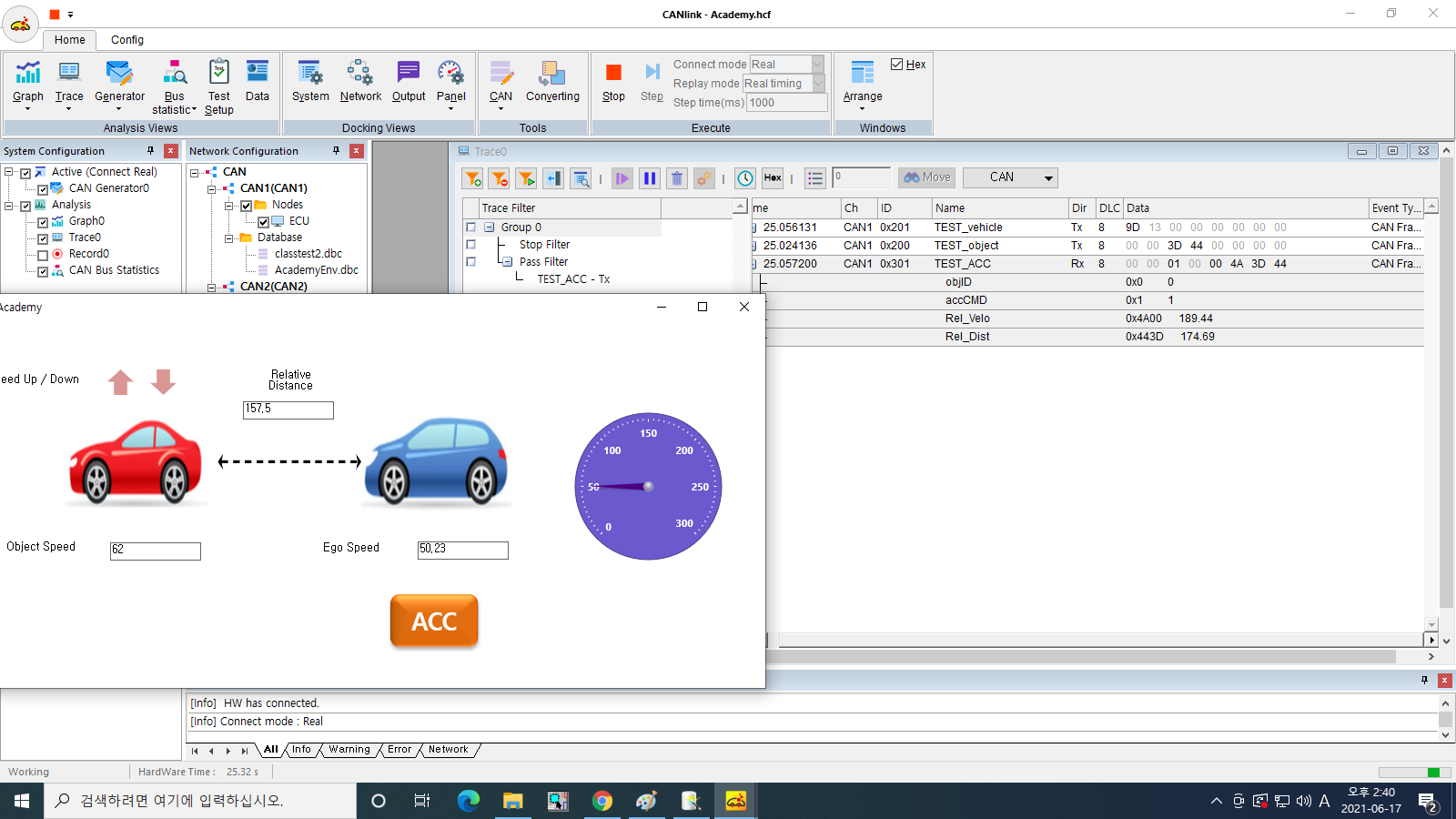
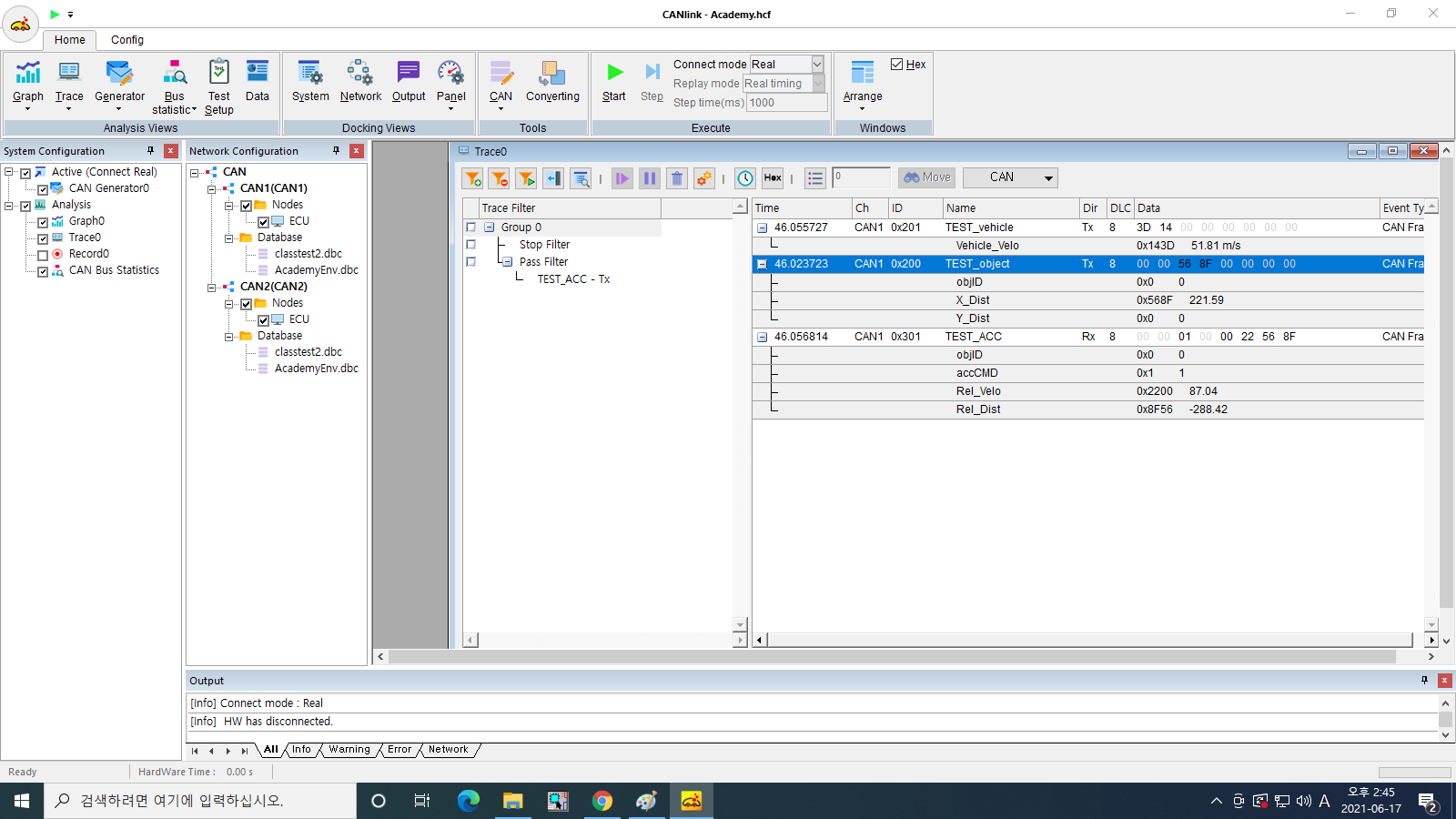
target과 ego car 의 상대 거리과 속도를 계산해서 CAN통신을 이용해서 감속과 가속함
카메라/Ridar -> CAN통신 안됨
ROS
pakage는 create로 만들어야 ros의 구성원이됨
/src 에 패키지를 만들어야됨, 다운 받아야 됨
패키지 안에 /src 디렉토리가 있음 -> 여기에 코드나 파일이나 다양한 것을 넣으면 됨
(ros에서는 python and cpp를 사용)
~/catkin_ws$ catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
rosrun ros_topic_test topic_pub_test(publisher)
rosrun ros_topic_test topic_sub_test(subscriber)

JH.velog