드디어 마무리 단계이다.
사실 프로젝트는 2월 말에 끝났는데 귀국과 개강으로 블로그 작성이 조금 늦었다.
결론부터 말하자면
데모 영상을 찍기로 한 날 아침 왼발의 ESP32가 죽었다.
여기저기 다른 팀들에 여분의 ESP32가 있는지 물어봤는데 다들 프로젝트 막바지라 남아있는 곳이 없어서 결국 오른발로만 테스트할 수 밖에 없었다.
데모영상 첫 시도는 중간에 Application이 죽어서 실패.
건물이 있는 블럭을 크게 도는 것이 목표였는데 Application이 꺼지는 바람에 다시 돌아왔다.
두 번째 시도부터는 건물 주위를 한바퀴 도는 것으로 목표를 바꿨다.
Outdoor Test
- experiment period: 02/23/2023
- Route
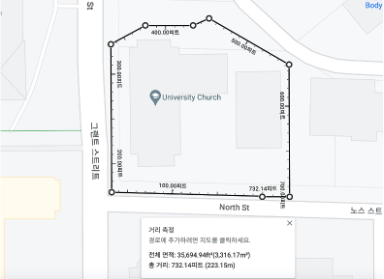
- average time: 1min 15sec
- 그 외 Runner의 정보는 너무 개인적이므로 넘어가도록 하겠다.
전체 코드
#include <Adafruit_MPU6050.h> // library for Inertial Measurement Unit(MPU6050) object
#include <Adafruit_Sensor.h> // library for common sensor
#include <Wire.h> // library for communicate with I2C
#include <WiFi.h> // library for WiFi connect
#include <WiFiClientSecure.h> // library for WiFi Secure
#include <ThingsBoard.h> // library for connect ThingsBoard and ESP32
#include <ArduinoJson.h> // library for JSON format(MQTT)
#define FORCE_SENSOR_PIN1 36 // ESP32 pin GIOP36 (ADC0): the FSR and 10K pulldown are connected to A0
#define FORCE_SENSOR_PIN2 39 // ESP32 pin GIOP39 (ADC3): the FSR and 10K pulldown are connected to A3
#define FORCE_SENSOR_PIN3 34 // ESP32 pin GIOP36 (ADC6): the FSR and 10K pulldown are connected to A6
#define FORCE_SENSOR_PIN4 35 // ESP32 pin GIOP36 (ADC7): the FSR and 10K pulldown are connected to A7
#define LED 2 // ESP32's built-in LED for checking status
// ESP32 will send data if "isRunning" is changed to 'true'
// the callback will be called for every shared attribute changed on the device
constexpr std::array<const char*, 1U> SUBSCRIBED_SHARED_ATTRIBUTES = {
"isRunning"
};
// Baud rate for the debugging serial connection
constexpr uint32_t SERIAL_DEBUG_BAUD PROGMEM = 115200U;
// WiFi information
constexpr char WIFI_SSID[] PROGMEM = "YOUR_WIFI_SSID_NAME";
constexpr char WIFI_PASSWORD[] PROGMEM = "YOUR_WIFI_PASSWORD";
// See https://thingsboard.io/docs/getting-started-guides/helloworld/
// to understand how to obtain an access token
constexpr char TOKEN[] PROGMEM = "YOUR_THINGSBOARD_DEVICE_TOKEN";
// Thingsboard we want to establish a connection too
constexpr char THINGSBOARD_SERVER[] PROGMEM = "YOUR_THINGSBOARD_SERVER_IP";
// MQTT port used to communicate with the server, 1883 is the default unencrypted MQTT port
constexpr uint16_t THINGSBOARD_PORT PROGMEM = 1883U;
// Maximum size packets will ever be sent or received by the underlying MQTT client
constexpr uint32_t MAX_MESSAGE_SIZE PROGMEM = 256U;
// Initialize underlying client, used to establish a connection
WiFiClient espClient;
// Initialize ThingsBoard instance with the maximum needed buffer size
ThingsBoardSized<MAX_MESSAGE_SIZE> tb(espClient);
//create mpu object
Adafruit_MPU6050 mpu;
// create variables for save FSR signal
int fsrReading1, fsrReading2, fsrReading3, fsrReading4;
// create variables for save IMU signal,
//instances to read sensor value
// a: accelerometer, g: gyroscope, temp : temmperature
sensors_event_t a, g, temp;
// Statuses for subscribing shared attributes
bool subscribed = false;
// Change when Start/Stop Button is clicked
// true: user is running & false: user is stop
bool runningStatus = false;
/// @brief Initialzes Inertial Measurement Sensor,
/// setting accelerometer and gyroscope range, and filter's bandwidth
void InitMPU() {
Wire.begin();
while(!Serial){
delay(100);
}
// finding MPU
if(!mpu.begin()) {
Serial.println("Failed to find mpu chip"); // code for debugging in Serial Monitor: when ESP failed to find MPU
while(1) {
delay(100);
}
}
// MPU Setting start
// The measurement range of accelerometer : 16g
mpu.setAccelerometerRange(MPU6050_RANGE_16_G);
// The measurement range of Gyroscope: 250 dps
mpu.setGyroRange(MPU6050_RANGE_250_DEG);
// Bandwidth of digital low pass filter (for callibration)
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
// Setting MPU end
Serial.println(""); // code for debugging in Serial Monitor
delay(100);
}
/// @brief Initalizes WiFi connection,
// will endlessly delay until a connection has been successfully established
void InitWiFi() {
Serial.println("Connecting to AP ...");
// Attempting to establish a connection to the given WiFi network
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
// checking WiFi connection
while (WiFi.status() != WL_CONNECTED) {
// Delay 500ms until a connection has been succesfully established
delay(500);
Serial.print(".");
}
Serial.println("Connected to AP");
// if WiFi is connected, built-in LED blinks once
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
}
/// @brief Reconnects the WiFi uses InitWiFi if the connection has been removed
/// @return Returns true as soon as a connection has been established again
const bool reconnect() {
// Check to ensure we aren't connected yet
const wl_status_t status = WiFi.status();
if (status == WL_CONNECTED) {
return true;
}
// If we aren't establish a new connection to the given WiFi network
InitWiFi();
return true;
}
/// @brief callback function that called when the ThingsBoard's shared attribute is changed,
/// in this code, variable 'runningStatus' value will be replaced to "isRunning" value.
void processRunningStatusUpdate(const Shared_Attribute_Data &data) {
// replace runningStatus's value to given isRunnning's value
runningStatus = data["isRunning"];
// check the runningStatus
if(!runningStatus){
// if runningStatus is _false_ send message to ThingsBoard that ESP32 is also stopped.
tb.sendTelemetryData("isStop", true);
}
// When the shared attribute 'isRunning' is changed, built-in LED blinks 3 times.
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
}
// callback when the shared attribute is changed
// it will check all shared attributes that includes in array "SUBSCRIBED_SHARED_ATTRIBUTES"
const Shared_Attribute_Callback callback(SUBSCRIBED_SHARED_ATTRIBUTES.cbegin(), SUBSCRIBED_SHARED_ATTRIBUTES.cend(), processRunningStatusUpdate);
// setup function for ESP32
void setup() {
// If analog input pin 0 is unconnected, random analog
// noise will cause the call to randomSeed() to generate
// different seed numbers each time the sketch runs.
// randomSeed() will then shuffle the random function.
randomSeed(analogRead(0));
// Initialize serial connection for debugging
Serial.begin(SERIAL_DEBUG_BAUD);
// set built-in LED for OUTPUT
pinMode(LED, OUTPUT);
// wait for a second
delay(1000);
InitWiFi(); // WiFi initializing
InitMPU(); // MPU initializing
}
// ESP32 will conduct this code during its power is on
void loop() {
// if the MPU6050's connection is lost, it will initialize MPU again.
if(!mpu.begin()){
InitMPU();
}
// if WiFi connection is lost, it will reconnect to WiFi
if(WiFi.status() != WL_CONNECTED){
reconnect();
}
// if ESP32 is not connected to ThingsBoard, it will try to connect with
// ThinsgBoard Server IP, Device token, ThingsBoard MQTT port
if(!tb.connected()) {
Serial.print("Connecting to: ");
Serial.print(THINGSBOARD_SERVER);
Serial.print(" with token ");
Serial.println(TOKEN);
if(!tb.connect(THINGSBOARD_SERVER, TOKEN, THINGSBOARD_PORT)) {
Serial.println("Failed to connect");
return;
}
}
if(!subscribed) {
tb.Shared_Attributes_Subscribe(callback);
subscribed = true;
// checking for subscription status, if subscribing success, built-in led will blink twice.
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
digitalWrite(LED, HIGH);
delay(100);
digitalWrite(LED, LOW);
delay(100);
}
// counting variable for sendingData
int count = 0;
// when runningStatus is true, it will send data for 1s
if (runningStatus) {
while(count < 100){
count++;
sendData();
}
}
tb.loop();
}
void sendData(){
// Reading Start
mpu.getEvent(&a, &g, &temp);
fsrReading1 = analogRead(FORCE_SENSOR_PIN1);
fsrReading2 = analogRead(FORCE_SENSOR_PIN2);
fsrReading3 = analogRead(FORCE_SENSOR_PIN3);
fsrReading4 = analogRead(FORCE_SENSOR_PIN4);
// Reading End
// Make Json Document to send data
StaticJsonDocument<500> SensorValues;
SensorValues["acc_x"] = a.acceleration.x; // MPU6050's acceleration value in x-axis direction
SensorValues["acc_y"] = a.acceleration.y; // MPU6050's acceleration value in y-axis direction
SensorValues["acc_z"] = a.acceleration.z; // MPU6050's acceleration value in z-axis direction
SensorValues["gyro_x"] = g.gyro.x; // MPU6050's gyro sensor value in x-axis direction
SensorValues["gyro_y"] = g.gyro.y; // MPU6050's gyro sensor value in y-axis direction
SensorValues["gyro_z"] = g.gyro.z; // MPU6050's gyro sensor value in z-axis direction
SensorValues["fsr_1st"] = fsrReading1; // The forefoot's force sensitive resistor value
SensorValues["fsr_2nd"] = fsrReading2; // The midfoot - left's force sensitive resistor value
SensorValues["fsr_3rd"] = fsrReading3; // The midfoot - right's force sensitive resistor value
SensorValues["fsr_4th"] = fsrReading4; // The rearfoot's force sensitive resistor value
// Start sending data
char buffer[500];
serializeJson(SensorValues, buffer);
tb.sendTelemetryJson(buffer);
// End sending data
delay(10); //wait 0.01s for sending next data
}Demo Video
왼발을 사용할 수 없던 게 너무 아쉽지만 그래도 어떻게 잘 끝마칠 수 있었다.
한국에 와서도 추가 작업을 할 수 있었다면 좋았겠지만 졸업 프로젝트가 또 처음 해보는 분야인 관계로...오른발로만 마무리를 지어야 할 것 같다.
더 많은 정보는 우리 팀 깃허브 에서 확인이 가능하다.
ESP32에 올린 코드 외에도 ThingsBoard의 RuleChain에 들어가는 부분이라든지 Flutter로 만든 Application 코드라든지 여러 개요들을 확인할 수 있다.
두 달간 진짜 쌩초보 상태에서 어떻게든 해냈다.
프로젝트 하나 끝!
