1. 문제 링크
https://www.acmicpc.net/problem/14499
2. 문제

요약
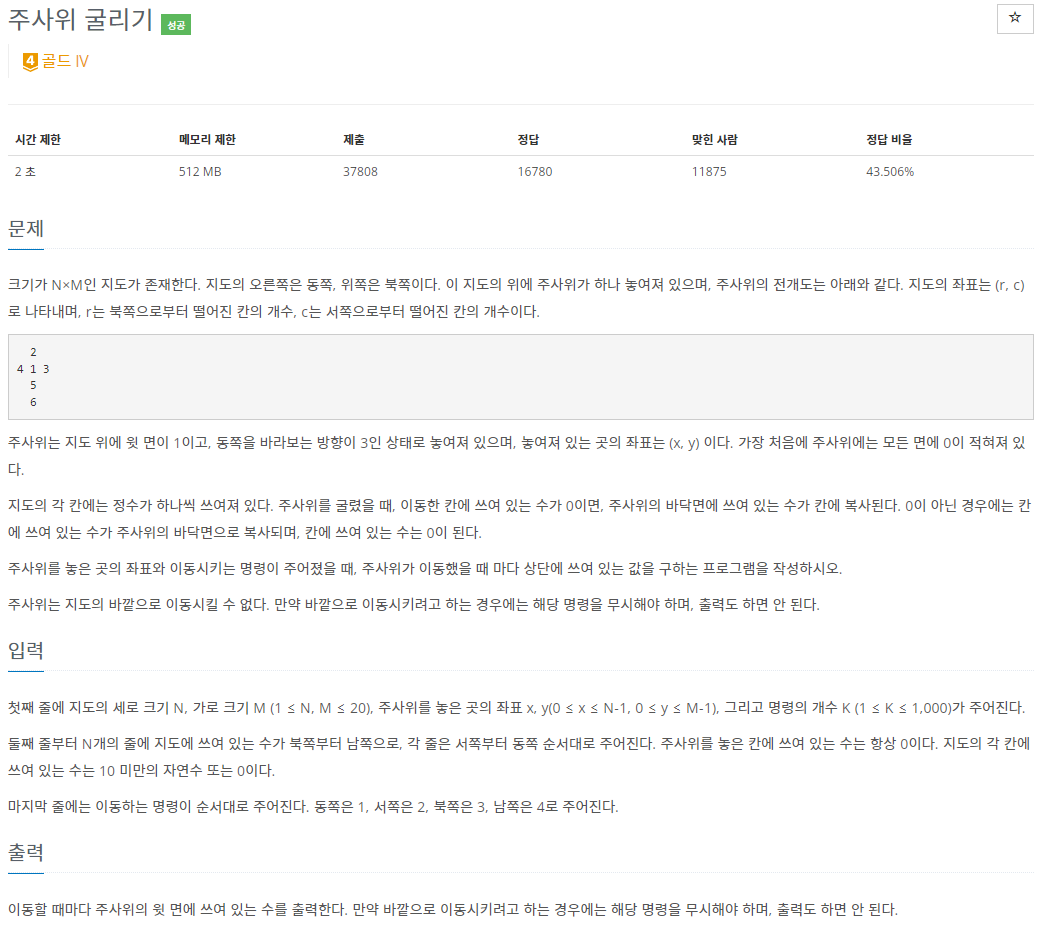
- 크기가 NxM인 지도가 존재하고, 지도의 오른쪽은 동쪽, 위쪽은 북쪽은 나타냅니다.
- 지도의 좌표는 (r, c)로 나타내며, r은 북쪽으로부터 떨어진 칸의 개수, c는 서쪽으로부터 떨어진 칸의 개수입니다.
- 지도의 위에 주사위가 하나 놓여져있으며, 주사위 전개도는 아래와 같습니다.
2
4 1 3
5
6- 주사위는 지도 위에 윗 면이 1이고, 동쪽을 바라보는 방향이 3인 상태로 놓여져 있으며, 놓여져 있는 곳의 좌표는 (x, y)입니다.
- 처음에 주사위에는 모든 면에 0이 적혀 있습니다.
- 지도의 각 칸에는 정수가 하나씩 쓰여져 있고, 주사위를 굴렸을 때 이동한 칸에 쓰여있는 수가 0이면 주사위의 바닥면에 쓰여있는 수가 칸에 복사되고, 0이 아닌 경우에는 칸에 쓰여있는 수가 주사위의 바닥면으로 복사되며, 칸에 쓰여있는 수는 0이 됩니다.
- 주사위를 지도의 바깥으로 이동시키려고 한다면 해당 명령을 무시해야 하며, 출력도 하지 않습니다.
- 주사위를 놓은 곳의 좌표와 이동시키는 명령이 주어졌을 때, 주사위가 이동했을 때마다 상단에 쓰여있는 값을 구하는 문제입니다.
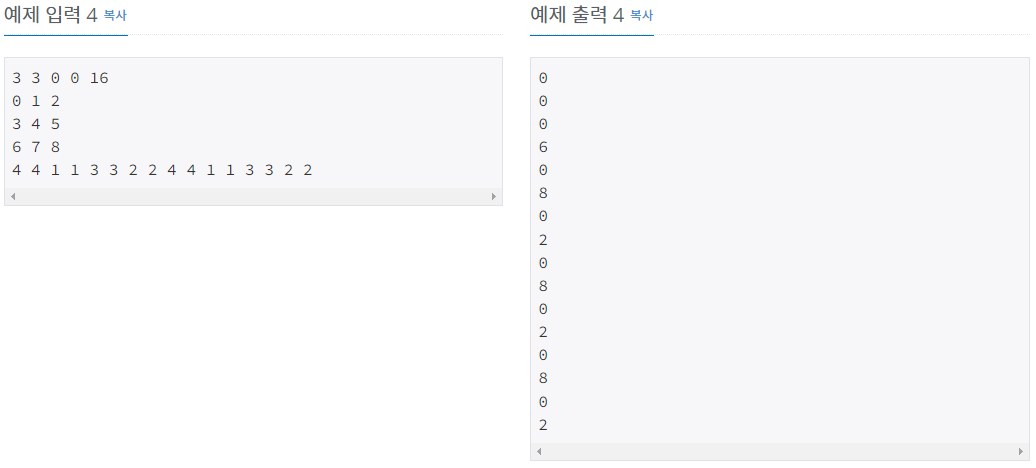
- 입력: 첫 번째 줄에 1보다 크거나 같고 20보다 작거나 같은 지도의 세로 크기 N, 가로 크기 M, 주사위를 놓은 곳의 좌표 x, y, 1보다 크거나 같고 1,000보다 작거나 같은 명령의 개수 K가 주어지고 두 번째 줄부터 N개의 줄에는 지도에 쓰여 있는 수가 북쪽부터 남쪽으로, 각 줄은 서쪽부터 동쪽 순서대로 주어지며 마지막 줄에는 이동하는 명령이 순서대로 주어집니다.
- 주사위를 놓은 곳의 좌표는 범위 내에 존재합니다.
- 주사위를 놓은 칸에 쓰여있는 수는 항상 0입니다.
- 지도의 각 칸에 쓰여있는 수는 10 미만의 자연수 또는 0입니다.
- 명령은 동쪽은 1, 서쪽은 2, 북쪽은 3, 남쪽은 4로 주어집니다.
- 출력: 이동할 때마다 주사위의 윗 면에 쓰여있는 수를 출력합니다.
- 바깥으로 이동시키려는 경우는 해당 명령을 무시해야 하며, 출력도 하지 않습니다.
3. 소스코드
import java.io.BufferedReader;
import java.io.IOException;
import java.io.InputStreamReader;
import java.util.ArrayList;
import java.util.StringTokenizer;
public class Main {
static StringBuilder sb = new StringBuilder();
static int N, M, x, y, K, front = 2, left = 4, right = 3, behind = 5, bottom = 6, top = 1;
static int[][] map;
static int[] order, values = new int[7], opposite = new int[] {0, 6, 5, 4, 3, 2, 1};
static ArrayList<Integer> top_values;
static void input() {
Reader scanner = new Reader();
top_values = new ArrayList<>();
N = scanner.nextInt();
M = scanner.nextInt();
map = new int[N][M];
x = scanner.nextInt();
y = scanner.nextInt();
K = scanner.nextInt();
order = new int[K];
for(int i = 0; i < N; i++) {
for(int j = 0; j < M; j++) {
map[i][j] = scanner.nextInt();
}
}
for(int i = 0; i < K; i++) order[i] = scanner.nextInt();
}
static void solution() {
for(int i = 0; i < K; i++) {
if(order[i] == 1) {
if(canMove(x, y + 1)) {
moveRight(x, y + 1);
y++;
}
} else if(order[i] == 2) {
if(canMove(x, y - 1)) {
moveLeft(x, y - 1);
y--;
}
} else if(order[i] == 3) {
if(canMove(x - 1, y)) {
moveUp(x - 1, y);
x--;
}
} else if(order[i] == 4) {
if(canMove(x + 1, y)) {
moveDown(x + 1, y);
x++;
}
}
}
for(int value : top_values) sb.append(value).append('\n');
System.out.print(sb);
}
static void moveRight(int x, int y) {
changeDiceDirection(front, bottom, top, behind, right, left);
if(map[x][y] == 0) changeMapValue(x, y);
else changeDiceValue(x, y);
findTopValue();
}
static void moveLeft(int x, int y) {
changeDiceDirection(front, top, bottom, behind, left, right);
if(map[x][y] == 0) changeMapValue(x, y);
else changeDiceValue(x, y);
findTopValue();
}
static void moveUp(int x, int y) {
changeDiceDirection(bottom, left, right, top, behind, front);
if(map[x][y] == 0) changeMapValue(x, y);
else changeDiceValue(x, y);
findTopValue();
}
static void moveDown(int x, int y) {
changeDiceDirection(top, left, right, bottom, front, behind);
if(map[x][y] == 0) changeMapValue(x, y);
else changeDiceValue(x, y);
findTopValue();
}
static boolean canMove(int x, int y) {
if(0 <= x && x < N && 0 <= y && y < M) return true;
return false;
}
static void changeDiceDirection(int next_front, int next_left, int next_right, int next_behind, int next_bottom, int next_top) {
front = next_front;
left = next_left;
right = next_right;
behind = next_behind;
bottom = next_bottom;
top = next_top;
}
static void changeDiceValue(int x, int y) {
values[bottom] = map[x][y];
map[x][y] = 0;
}
static void changeMapValue(int x, int y) {
map[x][y] = values[bottom];
}
static void findTopValue() {
top_values.add(values[top]);
}
public static void main(String[] args) {
input();
solution();
}
static class Reader {
BufferedReader br;
StringTokenizer st;
public Reader() {
br = new BufferedReader(new InputStreamReader(System.in));
}
String next() {
while(st == null || !st.hasMoreElements()) {
try {
st = new StringTokenizer(br.readLine());
} catch (IOException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
}
return st.nextToken();
}
int nextInt() {
return Integer.parseInt(next());
}
}
}4. 접근
- 주어진 명령들을 순서대로 진행하면서 명령을 진행한 후에 상단에 쓰여있는 값들을 출력합니다.
solution 함수
static void solution() {
for(int i = 0; i < K; i++) {
if(order[i] == 1) {
if(canMove(x, y + 1)) {
moveRight(x, y + 1);
y++;
}
} else if(order[i] == 2) {
if(canMove(x, y - 1)) {
moveLeft(x, y - 1);
y--;
}
} else if(order[i] == 3) {
if(canMove(x - 1, y)) {
moveUp(x - 1, y);
x--;
}
} else if(order[i] == 4) {
if(canMove(x + 1, y)) {
moveDown(x + 1, y);
x++;
}
}
}
for(int value : top_values) sb.append(value).append('\n');
System.out.print(sb);
}- solution 함수에서는 주어진 명령들을 처음부터 보면서 어느 방향으로 이동하는 명령인지 확인하고 해당 방향으로 이동했을 때 지도 바깥으로 나가는지 확인하여 그렇지 않다면 해당 방향으로 움직이도록 합니다.
- 각 명령에서 상단에 쓰여있는 값을 top_values에 저장하고 모든 명령을 수행했을 때, top_values에 있는 값들을 출력합니다.
canMove 함수
static boolean canMove(int x, int y) {
if(0 <= x && x < N && 0 <= y && y < M) return true;
return false;
}- canMove 함수는 명령에 맞는 방향으로 주사위를 옮겼을 때, 그 위치가 지도 바깥인지를 판별하는 함수입니다.
- 만약 바깥이라면 false를, 그렇지 않다면 true를 반환합니다.
changeDiceDirection 함수
static void changeDiceDirection(int next_front, int next_left, int next_right, int next_behind, int next_bottom, int next_top) {
front = next_front;
left = next_left;
right = next_right;
behind = next_behind;
bottom = next_bottom;
top = next_top;
}- 이 함수는 명령에 맞는 방향으로 움직였을 때, 주사위가 보는 방향을 변경해주는 함수입니다.
- 예를 들어, 주사위가 남쪽으로 움직였다면, 상단에 위치한 면은 앞면이 될 것이고, 하단에 위치한 면은 뒷면이 될 것이며, 앞면은 하단에 위치한 면이, 뒷면은 상단에 위치한 면이 될 것입니다.
- 이렇게 주사위가 이동할 때마다 주사위의 각 면이 바라보는 방향이 달라질텐데, 이를 변경해주는 함수입니다.
changeDiceValue 함수
static void changeDiceValue(int x, int y) {
values[bottom] = map[x][y];
map[x][y] = 0;
}- 이 함수는 명령에 맞는 방향으로 움직이고 나서 주사위가 있는 위치의 지도의 값이 0이 아닐 때 지도에 있는 값을 주사위 하단에 복사하는 작업을 하는 함수입니다.
- 지도에 있는 값을 주사위 하단에 복사하고 지도에 있는 값은 0으로 변경됩니다.
changeMapValue 함수
static void changeMapValue(int x, int y) {
map[x][y] = values[bottom];
}- 이 함수는 명령에 맞는 방향으로 움직이고 나서 주사위가 있는 위치의 지도의 값이 0일 때 주사위 하단에 위치한 면의 값을 지도에 복사하는 함수입니다.
findTopValue 함수
static void findTopValue() {
top_values.add(values[top]);
}- 이 함수는 명령을 실행하고 난 후 상단에 위치한 값을 뽑아내어 이를 top_values에 넣는 함수입니다.
move~ 함수
static void moveRight(int x, int y) {
changeDiceDirection(front, bottom, top, behind, right, left);
if(map[x][y] == 0) changeMapValue(x, y);
else changeDiceValue(x, y);
findTopValue();
}- move류의 함수는 명령에 맞는 방향으로 이동하여 명령을 수행하는 함수입니다.
- 동쪽으로 이동하는 명령을 예시로 보면
1. changeDiceDirection 함수를 통해 주사위가 동쪽으로 이동했을 때 변화하는 각 면이 바라보는 방향을 변경해줍니다.- 주사위가 이동한 곳의 지도의 값이 0인지 아닌지 체크합니다.
- 만약 0이라면 changeMapValue 함수를 통해 주사위 하단에 위치한 면의 값을 지도에 복사합니다.
- 만약 0이 아니라면 changeDiceValue 함수를 통해 지도의 값을 주사위 하단에 위치한 면에 복사하고 지도의 값을 0으로 만들어줍니다.
- 주사위의 이동과 값 변경을 완료하였으니 findTopValue 함수를 통해 주사위 상단에 위치한 값을 뽑고 이를 top_values에 넣어줍니다.
- 주사위가 이동한 곳의 지도의 값이 0인지 아닌지 체크합니다.

자바, 웹 개발을 열심히 공부하고 있습니다!