6장 모델 변환과 시점 변환
학습 목표
-
어파인 공간을 정의하는 이유 이해
-
동차 좌표를 정의하는 이유 이해
-
이동, 회전, 크기 조절등의 기하변환과 변환 행렬 이해
-
모델 좌표계, 전역 좌표계, 시점 좌표계의 차이점 이해
-
좌표계 변환과 변환 행렬과의 관계 이해
-
기하변환 순서와 함수호출 순서의 상관관계를 이해
Section 01 좌표계 - 3차원 물체 표현
경계면 표현
-
메쉬, 표면 메쉬, 다각형 메쉬, 표면 다각형, 다각형
-
사각형 메쉬 : 평면 보장 못함
-
삼각형 메쉬 : 평면 보장. 2배의 드로잉 속도
와이어 프레임과 솔리드 렌더링
-
와이어 프레임 : 드로잉 속도가 빠름.
-
가끔씩 솔리드 렌더링으로 외형 확인
어파인 공간
V = Q - P
Q = V + P
등식의 우변은 벡터와 점 사이의 덧셈이 된다.
어파인 공간
점과 벡터를 동족처럼 취급 함으로써 벡터 공간을 확장
어파인 연산
-
벡터와 벡터의 뎃셈(뺼셈)
-
스칼라와 벡터의 곱셉(나눗셈)
-
점과 벡터의 덧셈(뺄셈)
선분 표현
-
V = P + (1/2)(Q - P)
-
P + t(Q - P) = (1 - t)P + (t)Q ( 0 <= t <= 1)
Q1) P(-2, -4)이고 Q(4, 2)인 경우 t= 2/5인 점을 구하라
Q2) V = (10/4, 2/4)일 때 t값을 구하시오.
일단 P, Q, t 이렇게 아파인 어쩌구 합 구하라고 하면은
V = P + t(Q - P) or (1 - t)P + (t)Q 를 생각하자.
Q1) V = (2/5, -8/5)
Q2) t = 3/4
좌표계
- 기반벡터 (직교 좌표계, 원기둥 좌표계, 원구 좌표계)
원점과 기반 벡터로 구서되는 프레임
"원점" = 어파인 공간에서 기반벡터 시작점을 일치시킨 곳
"점" = P = r + 4v1 + 2v2 + v3 : 원점이 필요.
Sectionc 02 기하변환 - 기하변환
-
물체 변환 또는 좌표계 변환의 기본
-
행렬로 표현됨
-
이동, 회전, 크기 조절 등
3차원에서 평행이동
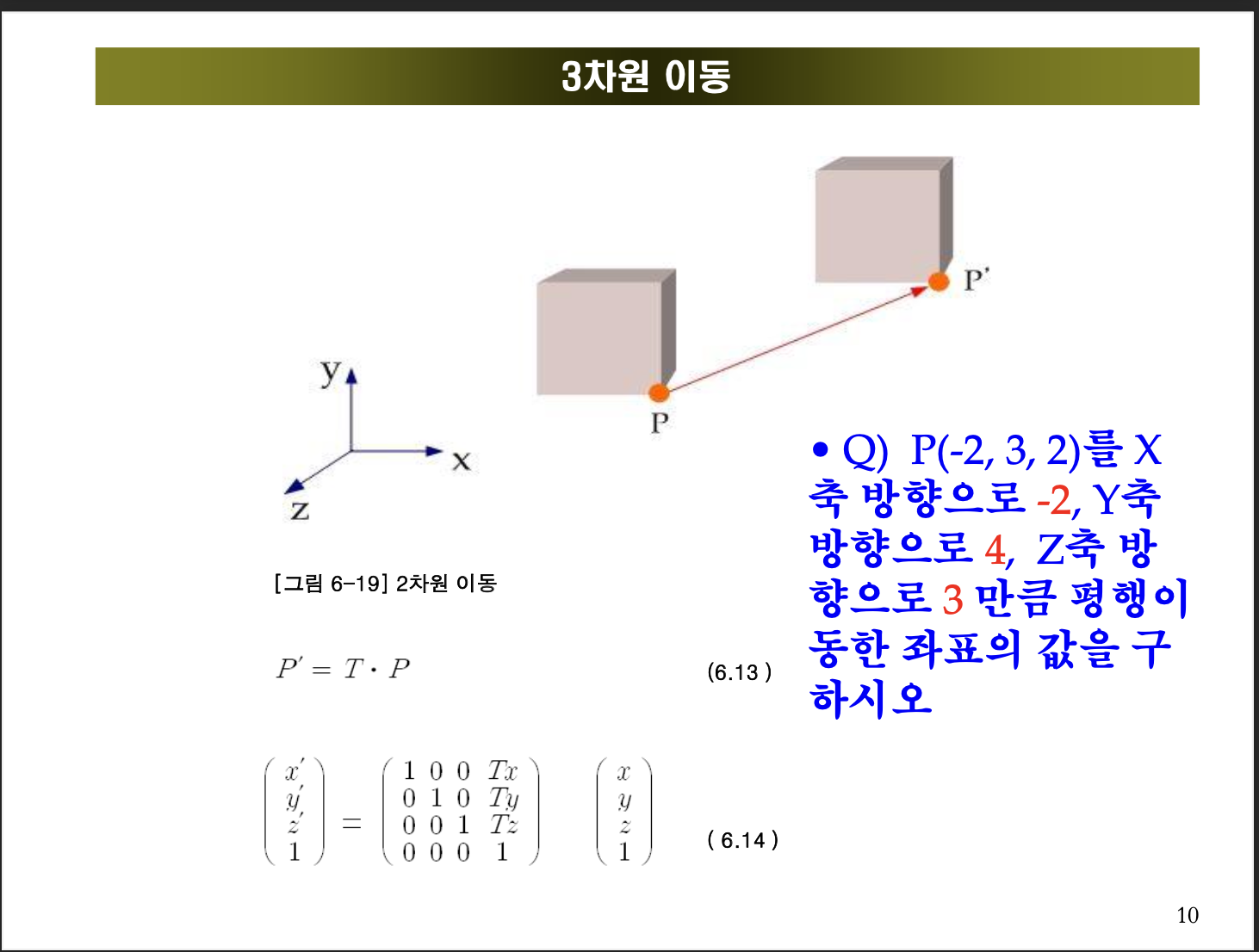
파란색 문제는
행렬 계산을 해준다. x, y, z 자리에 그냥 -2, 4, 3 차례대로 넣어주고 행렬 계산 하면 된다.
구조왜곡 변환
-
테이퍼링 (Tapering)
z에 따라 x, y의 크기 조절
-
휨 (Bending)
축을 따라 물체가 휨.
-
비틀림 (Twisting)
z에 따라 회전각 증가
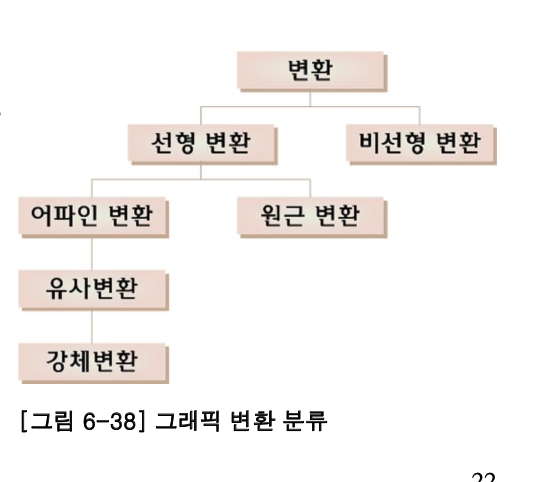
그래픽 변환
-
강체 변환(Ridid Body Transformation)
이동변환, 회전변환
-
유사변환
강제변환 + 균등 크기 조절 변환, 반사변환
물체면 사이의 각이 유지됨
물체 내부 정점간의 거리가 일정한 비율로 유지됨 -
어파인 변환
유사변환 + 차등 크기조절 변환, 전단변환
물체의 타입이 유지
Section 03 지엘의 모델 변환 - 모델 좌표계
-
모델링
물체를 설계 = 물체 정점을 정의
-
좌표계 (눈금)단위
임의로 설정
물체 공간 : 부동소수 정밀도 -
좌표계 원점 및 축방향
설계상의 편의
물체마다서로 다름 -
모델 좌표계 : 또는 지역 좌표계
MCS == Modeling Coordinate System
전역 좌표계
- 장면
여러 물체가 존재 = 여러 지역 좌표계가 존재
이률적으로 어우를 수 있는 기준 좌표계 - 시점
바라보는 위치에 따라 장면은 달라보임
시점 좌표계
지엘 파이프 라인
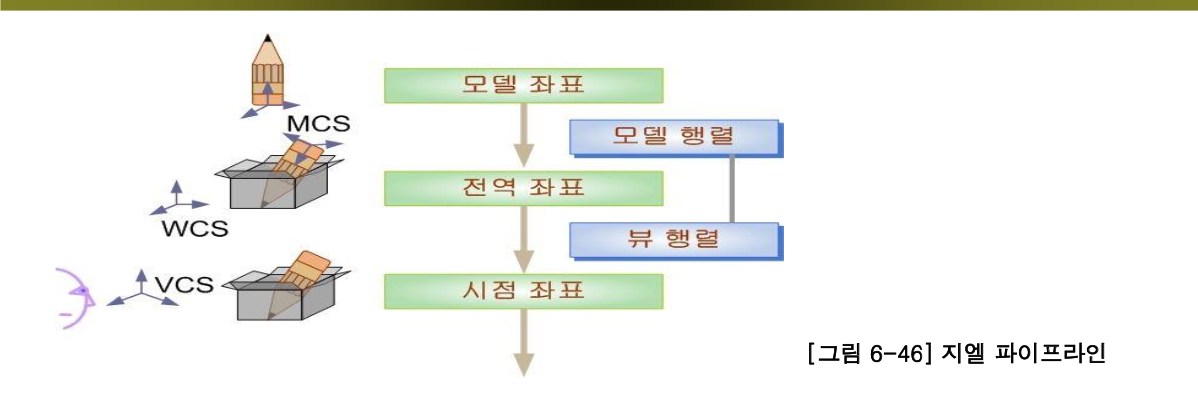
MCS -> 전역 좌표 -> 시점 좌표
- 모델변환
물체에 가해지는 기하변환
모델행렬로 대변됨
"모델 좌표"에 "모델 행렬"을 곱하면 => "전역 좌표"가 됨.
- 시점 변환 또는 뷰변환
카메라 위치와 방향 설정
뷰행렬로 대변됨
전역좌표에 "뷰행렬"을 곱하면 "시점좌표"
- 지엘은 모델 행렬과 뷰행렬을 "모델뷰 행렬" 하나로 취급
물체를 뒤로 빼거나 카메라를 앞으로 미나 마찬가지
지엘의 모델 변환
-
행렬모드 설정
-
현 변환 행렬