ARAP은 메쉬 변형 알고리즘이다. CGAL에도 구현되어있고, python으로도 Open3D 통해서 사용할 수 있다. Vertex 수천개 정도 스케일에서는 꽤 빠르게 돌아가는 편이다.
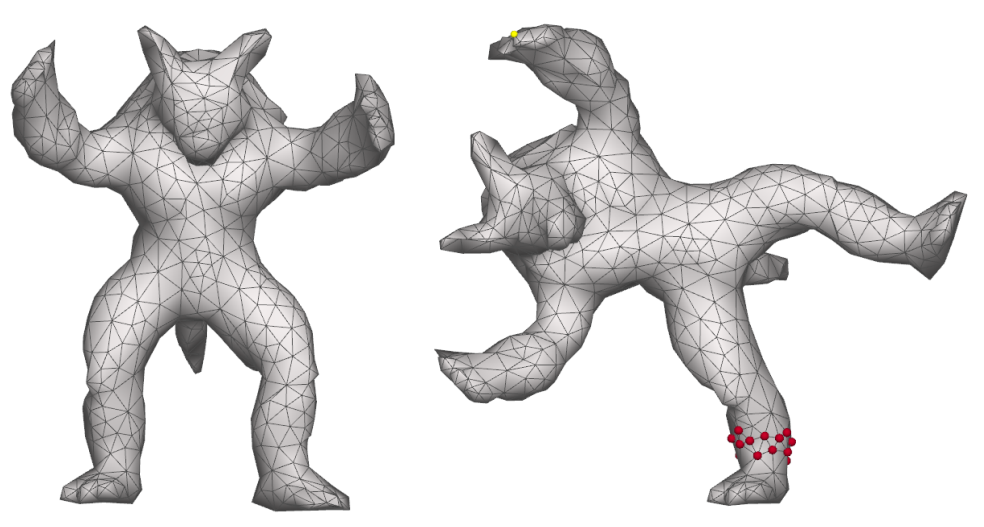
ARAP으로 변형한 Armadillo. 오른쪽 그림에서 오른쪽 다리의 빨간 점들이 fixed point이고 왼손의 노란 점이 handle이다.
배경
두 surface 사이의 차이는 shell energy라는 것을 통해 측정할 수 있는데
Es(S,S′)=∫Ωks∥I′−I∥F2+kb∥II′−II∥F2
I와 II는 각각 first, second fundamental form이다. I은 surface의 strechting과 관련 있고, II는 bending과 관련 있다. 따라서 만약 surface S과 S′사이의 deform이 rigid하면 shell energy는 0이다. Non-rigid 한 deform을 찾을 때에도, shell energy가 0은 아니더라도 최소화 되도록 찾으면 (as-rigid-as possible 하게), local한 shape이 유지될 수 있다.
Cell Ci (여기선 vertex i의 one-ring neighborhood로 정의)와 deform된 버전 Ci′에 대해 deformation이 rigid하다면 rotation matrix Ri로
pi′−pj′=Ri(pi−pj),∀j∈N(i)
로 나타낼 수 있다. pi는 vertex 좌표. N(i)는 vertex i의 neighborhood (참고로,
∀j∈N(i)에 대해 i∈N(j)이므로 cell들은 overlapping되어 있다.). Deformation이 non-rigid면 deform을 제일 잘 approximation하는 Ri는 아래의 weighted square를 minimize하는 것이다.
E(Ci,Ci′)=j∈N(i)∑wij∥(pi′−pj′)−Ri(pi−pj)∥2
pi−pj를 eij로 적자. 그럼 위 식은 다시 쓰면
j∑wij(eij′−Rieij)T(eij′−Rieij)=j∑wij(eij′Teij′−2eij′TRieij+eijTeij)
나머지 항은 상수니까 Ri을 포함하는 term만 minimize할 수 있는데,
Riargminj∑−2wijeij′TRieij=Riargmaxj∑wijeij′TRieij
Weighted inner product를 trace를 사용한 형태로 변형시키면 (Tr(yxT)=xTy),
=RiargmaxTr(j∑wijRieijeij′T)=RiargmaxTr(Rij∑wijeijeij′T)
이다.
Si=j∈N(i)∑wijeijeij′T=PiDiPi′T
Si를 eij로 구성된 3×∣N(i)∣ 행렬 Pi와 wij로 구성된 ∣N(i)∣×∣N(i)∣ 대각행렬 Di를 이용해서 쓸 수 있다. 만약 행렬 M이 PSD이면 어느 orthogonal 행렬 R에 대해서도 Tr(M)≥Tr(RM)이므로, RiSi를 symmetric PSD로 만드는 행렬 Ri가 Tr(RiSi)를 maximize한다. 그러한 Ri 는 SVD해서 (Si=UiΣiViT)
Ri=ViUiT
를 통해서 구할 수 있다.
구체적인 메소드
앞에서 정의했던 cell에 대한 에너지를 전체 surface에 대해 합하면
E(S′)=i=1∑nwiE(Ci,Ci′)=i∑wij∈N(i)∑wij∥(pi′−pj′)−Ri(pi−pj)∥2
이 때, weight wi와 wij를 어떻게 골라야 할까? Deformation energy가 최대한 mesh-independent 하기 위해서 (특히 이 경우 non-uniform한 cell의 영향을 줄이기 위해서) cotangent weight을 사용한다.
wij=(cotαij+cotβij)/2
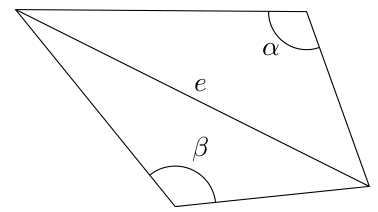
α와 β는 e에 마주보고 있는 angle이다. Computing Discrete Minimal Surfaces and Their Conjugates을 참조하면 Dirichlet energy란 함수가 얼마만큼 변화하는가에 대한 measure이다(ED(f)=21∫Ω∣∇f∣2). 이런 surface에서 angle-preserving 한 mapping을 구하려면, 얼마만큼 Cauchy-Riemann equation을 만족하느냐를 나타내는 conformal energy라는 것을 사용하면 되는데, 이 conformal energy를 minimize하는 것이 Dirichlet energy 빼기 mapping area를 minimize하는 것과 동치라고 한다(https://math.stackexchange.com/questions/3213598/what-are-the-use-cases-of-the-dirichlet-energy-in-computer-vision 참조). 아무튼 계산해보면 triangle간의 linear map에 대한 Dirichlet energy가
ED(f)=41i=1∑edges(cotαi+cotβi)∣ei∣2
가 된다 한다. 이 내용을 ARAP에서 이용한 것이다. Cell energy가 cell area에 비례하는데 Voronoi area를 이용해서 normalize 해줄 수 있다.
우리가 ARAP을 통해 하고 싶은 것은 sparse한 user input을 constraint으로 두고, 나머지에 해당하는 vertex의 위치를 적절히 결정하고 싶은 것이다. 따라서 우리는 문제를 p’에 대해 풀어야한다. 또 R 역시 찾아야한다. 그래서 두 step으로 나눠서 한번은 R을 고정하고 p’를 찾고, 한번은 p’를 고정하고 R을 찾는다.
먼저 각 i에 대해 Ri을 찾는 것은 서로 독립적이므로 앞서 언급한 Si의 SVD를 이용한 방식으로 찾을 수 있다. (참고로, ARAP 외에 다른 deform 방식 중에는 이웃한 Ri 이 서로 비슷한 값을 갖도록 유도하는 것들도 있다.)
pi′는 partial derivate를 이용해서 찾을 수 있다.
∂pi′∂E(S′)=∂pi′∂⎝⎜⎛j∈N(i)∑wij∥(pi′−pj′)−Ri(pi−pj)∥2+j∈N(i)∑wji∥(pj′−pi′)−Rj(pj−pi)∥2⎠⎟⎞=j∈N(i)∑2wij((pi′−pj′)−Ri(pi−pj))−j∈N(i)∑2wji((pj′−pi′)−Rj(pj−pi))
이 때, wij=wji 이므로
∂pi′∂E(S′)=j∈N(i)∑4wij((pi′−pj′)−21(Ri+Rj)(pi−pj))
derivative가 0이 되려면
j∈N(i)∑wij(pi′−pj′)=j∈N(i)∑2wij(Ri+Rj)(pi−pj)
왼쪽 term은 discrete Laplace-Beltrami operator가 p′에 적용된 형태임을 볼 수 있다. 따라서 Lp′=b 꼴이고 Cholesky decomposition을 이용해서 빠르게 풀 수 있다. (https://en.wikipedia.org/wiki/Cholesky_decomposition 의 application 항목 첫번째 문단 참조)
앞서 이웃한 Ri 이 서로 비슷한 값을 갖도록 유도하는 것들도 있다고 했는데, 이 term을 ARAP에 더한 것이 Smoothed Rotation Enhanced As-Rigid-As Possible (SR_ARAP) Deformation 이고 cell energy term에 ∥Ri−Rj∥F2을 더한다.
