[Programmers/프로그래머스] 2020 KAKAO BLIND RECRUITMENT 블록 이동하기 - Python/파이썬 [해설/풀이]
0

[Programmers/프로그래머스] 2020 KAKAO BLIND RECRUITMENT [코딩테스트]
- [Lv. 2] 문자열 압축
- [Lv. 2] 괄호 변환
- [Lv. 3] 자물쇠와 열쇠
- [Lv. 4] 가사 검색
- [Lv. 3] 기둥과 보 설치
- [Lv. 3] 외벽 점검
- [Lv. 3] 블록 이동하기
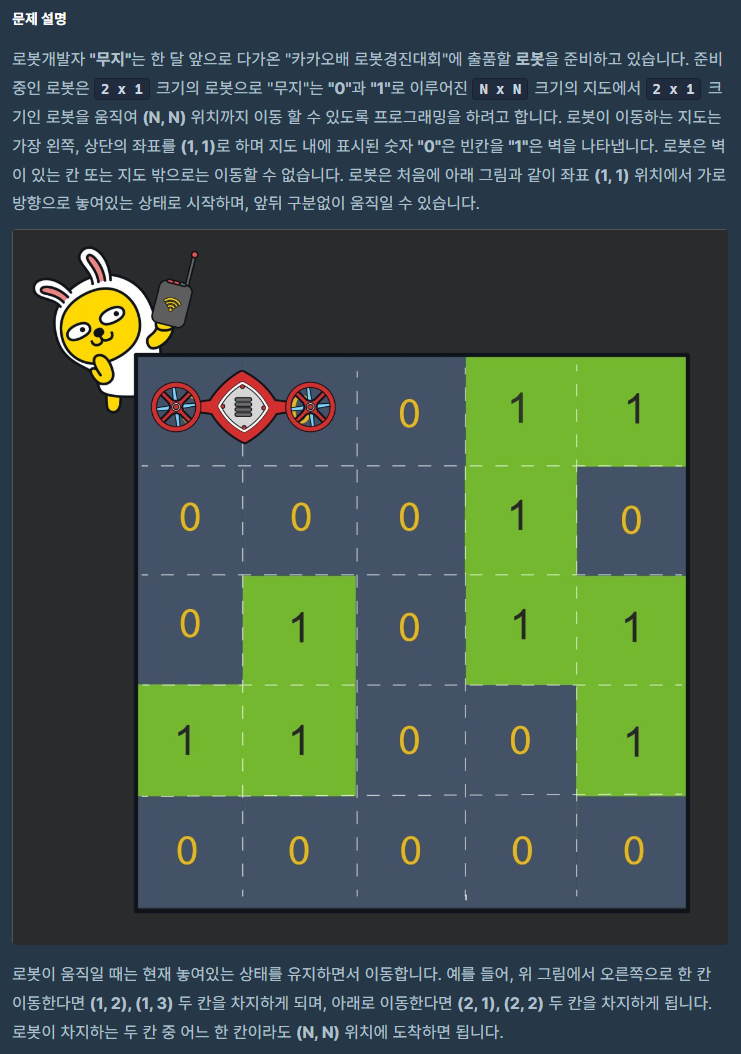
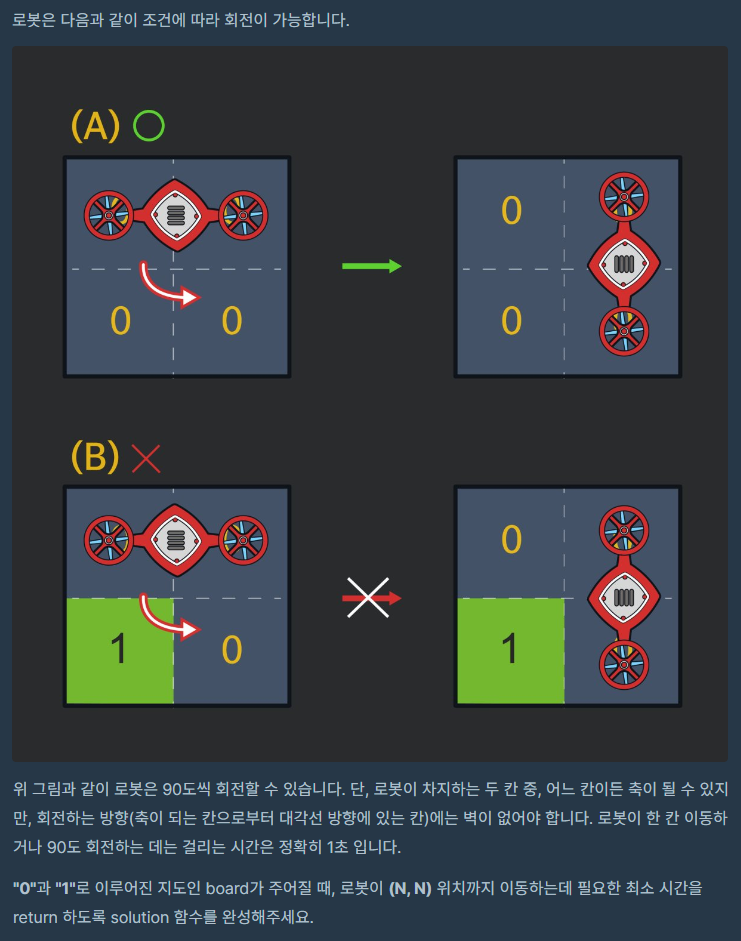
📌 문제
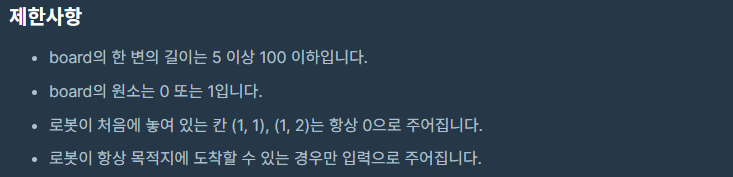
📝 제한사항
💻 입출력 예

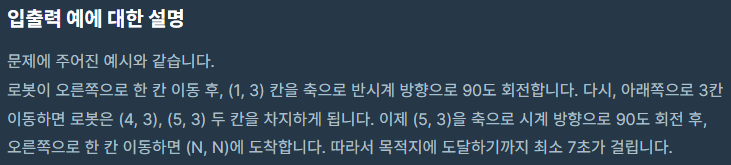
📖 입출력 예에 대한 설명
📌 풀이
from collections import deque
def get_next_position(position, board):
next_position = [] # 이동 및 회전 가능한 모든위치
x1, y1 = list(position)[0] # 로봇의 현재위치1, unpack을 위해 집합자료형 리스트로 변환
x2, y2 = list(position)[1] # 로봇의 현재위치2, unpack을 위해 집합자료형 리스트로 변환
# 현재위치로부터 이동가능한 모든위치 탐색, 중복방지를 위해 집합자료형으로 관리
dx = [-1, 1, 0, 0] # 상하좌우순
dy = [0, 0, -1, 1] # 상하좌우순
for i in range(4): # 상하좌우 각 4개의 방향에 대해
nx1, ny1 = x1 + dx[i], y1 + dy[i] # 로봇의 다음위치1
nx2, ny2 = x2 + dx[i], y2 + dy[i] # 로봇의 다음위치2
if board[nx1][ny1] == 0 and board[nx2][ny2] == 0: # 다음위치가 지도밖을 벗어나지 않거나, 벽이 없다면
next_position.append({(nx1, ny1), (nx2, ny2)}) # 이동가능한 모든위치에 다음위치 추가
# 현재위치로부터 회전가능한 모든위치 탐색, 중복방지를 위해 집합자료형으로 관리
if x1 == x2: # 로봇이 가로로 위치한 경우
for i in [-1, 1]: # 아래쪽 회전반경, 위쪽 회전반경
if board[x1 + i][y1] == 0 and board[x2 + i][y2] == 0: # 각 회전반경에 벽이 없다면
next_position.append({(x1, y1), (x1 + i, y1)}) # 왼축을 기준으로 회전한 경우 추가
next_position.append({(x2, y2), (x2 + i, y2)}) # 오른축을 기준으로 회전한 경우 추가
elif y1 == y2: # 로봇이 세로로 위치한 경우
for i in [-1, 1]: # 왼쪽 회전반경, 오른쪽 회전반경
if board[x1][y1 + i] == 0 and board[x2][y2 + i] == 0: # 각 회전반경에 벽이 없다면
next_position.append({(x1, y1), (x1, y1 + i)}) # 윗축을 기준으로 회전한 경우 추가
next_position.append({(x2, y2), (x2, y2 + i)}) # 아랫축을 기준으로 회전한 경우 추가
return next_position
def solution(board):
n = len(board)
# 지도 밖을 벗어나는 범위조건을 쉽게 확인하기 위해, 테두리를 1로 감싸는 작업
new_board = [[1] * (n + 2) for _ in range(n + 2)]
for row in range(n):
for col in range(n):
new_board[row + 1][col + 1] = board[row][col]
# BFS
visited = []
start = {(1, 1), (1, 2)} # 로봇 시작위치, 중복방지를 위해 집합자료형으로 관리
visited.append(start) # 로봇 방문기록
queue = deque([(start, 0)]) # [현재위치, 걸린시간]
while queue:
position, cost = queue.popleft() # 현재위치, 걸린시간
if (n, n) in position: # 목표지점에 도달했다면
return cost # 걸린시간 반환
for next_position in get_next_position(position, new_board): # 이동 및 회전 가능한 다음위치에 대해
if next_position not in visited: # 방문한적 없는 위치라면
visited.append(next_position) # 방문기록 후
queue.append((next_position, cost + 1)) # 큐에 추가
return 0
개발을 즐길 줄 아는 백엔드 개발자