PCL 라이브러리의 Octree 를 보고 따라한 것!
먼저 octree 를 만들고 난 후 특정 Search point 에서 가까운 points 들을 뽑아내는,
대표적인 방법에는 voxel search, knn search, radius search 가 있다. 푱푱...
1. 랜덤하게 포인트 클라우드 만들어 주기
void make_pcl_randomcloud()
{
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZI>);
// Generate pointcloud data
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize (cloud->width * cloud->height);
for (std::size_t i = 0; i < cloud->size (); ++i)
{
(*cloud)[i].x = 1024.0f * rand () / (RAND_MAX + 1.0f);
(*cloud)[i].y = 1024.0f * rand () / (RAND_MAX + 1.0f);
(*cloud)[i].z = 1024.0f * rand () / (RAND_MAX + 1.0f);
(*cloud)[i].intensity = 100;
}
pcl::io::savePCDFileASCII("저장경로", *cloud);
cout<<"Save Random Point Cloud is Done!"<<endl;
}이런식으로 해두고 씀. 근데 사실 push_back 을 쓰긴 해도 된다. 벡터니까.
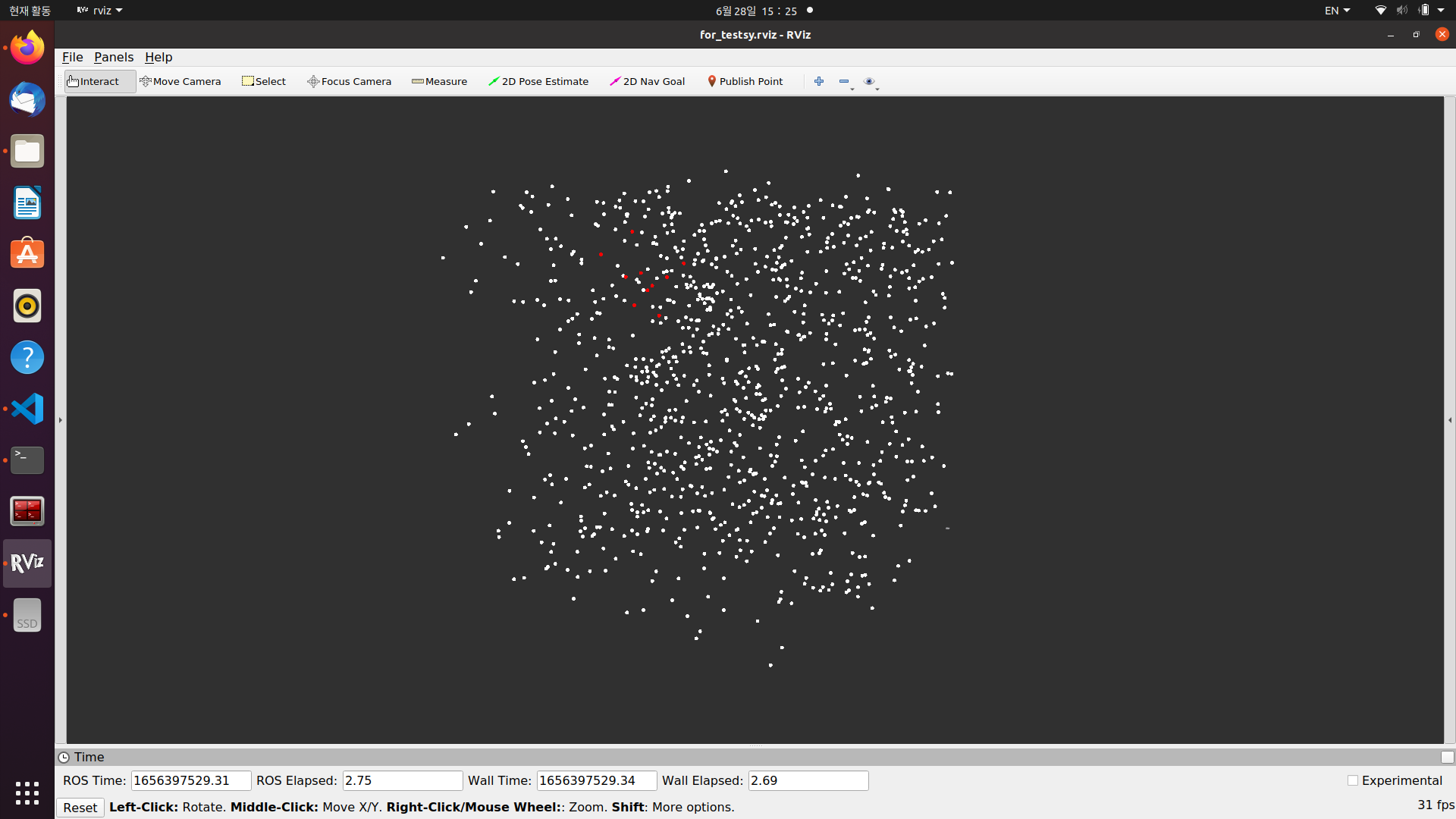
위와 같이 포인트 클라우드를 만들어주면

요런식으로 뜸. 1024 x 1024 x 1024 의 큐브 안에 랜덤한 포인트들이 존재하는 형태.
2. Search Function 사용하기
Search function 들은 어떤 특정한 인덱스 벡터 내에 원본클라우드를 조회할 수 있는 인덱스 정보를 반환해주는 형태이다. 가령 voxelSearch 함수 에서는 Search point 주변의 포인트들 중 voxel 영역에 포함되는 포인트들에 대한 정보를 포인트의 index로 지칭을 해서 vector 타입의 벡터 안에 반환을 해준다.
| i | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| idxVector[i] | 64435 | 64438 | 64434 | 64436 |
약간 위와 같은 느낌으로. 그래서 이 인덱스 voxel 영역에 들어온 포인트들을 실제로 조회하고 싶다면 cloud[idxVector[i]] 이렇게 조회를 해줘야 한다. [] 를 두번씩이나 써야해서 이해가 조금 어려움;;
2.1 Voxel Search 사용하기
void usingVoxelSearchMethod()
{
float resolution = 128.0f;
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud;
cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
cloud->reserve(200000000);
pcl::io::loadPCDFile<pcl::PointXYZI>("원본 PC 저장경로", *cloud);
pcl::octree::OctreePointCloudSearch<pcl::PointXYZI> octree (resolution);
octree.setInputCloud (cloud);
octree.addPointsFromInputCloud(); // 이걸 수행시 원본 PC 에 인덱스 붙음.
// Neighbors within voxel search
std::vector<int> pointIdxVec;
if (octree.voxelSearch (searchPoint, pointIdxVec))
{
std::cout << "Neighbors within voxel search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z << ")" << std::endl;
for (std::size_t i = 0; i < pointIdxVec.size (); ++i)
{
std::cout << " " << (*cloud)[pointIdxVec[i]].x << " " << (*cloud)[pointIdxVec[i]].y << " " << (*cloud)[pointIdxVec[i]].z << std::endl;
(*cloud)[pointIdxVec[i]].intensity = 2000;
}
}
pcl::io::savePCDFileASCII("저장경로", *cloud);
cout<<"Save VoxelSearch Point Cloud is Done!"<<endl;
}
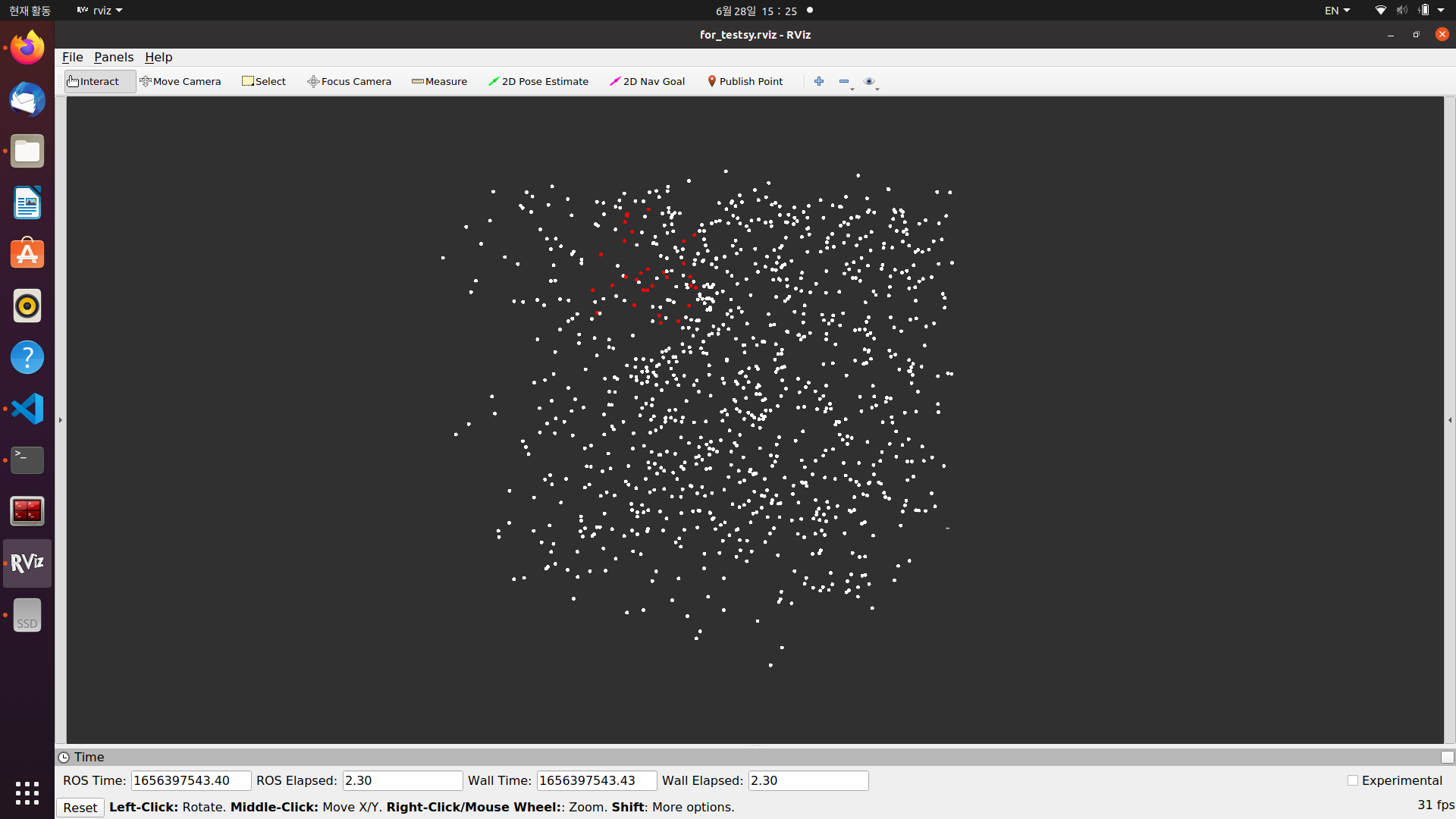
생각 보다 search point 주변의 128 x 128 x 128 voxel 내에서 포인트가 많이 없었던 모양이다.
2.2 knn Search 사용하기
knn 에서 추출할 neighbor 수로 설정한 파라미터 만큼 딱 내 위치 주변의 가장 가까운 점들을 뽑아준다. 여기서는 10개로 설정해보았다.
void usingKnnMethod()
{
float resolution = 128.0f;
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud;
cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
cloud->reserve(200000000);
pcl::io::loadPCDFile<pcl::PointXYZI>("/pc경로", *cloud);
pcl::octree::OctreePointCloudSearch<pcl::PointXYZI> octree (resolution);
octree.setInputCloud (cloud);
octree.addPointsFromInputCloud();
// K nearest neighbor search
int K = 10;
std::vector<int> pointIdxNKNSearch;
std::vector<float> pointNKNSquaredDistance;
std::cout << "K nearest neighbor search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z << ") with K=" << K << std::endl;
if (octree.nearestKSearch (searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (std::size_t i = 0; i < pointIdxNKNSearch.size (); ++i) {
std::cout << " " << (*cloud)[ pointIdxNKNSearch[i] ].x
<< " " << (*cloud)[ pointIdxNKNSearch[i] ].y
<< " " << (*cloud)[ pointIdxNKNSearch[i] ].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
(*cloud)[ pointIdxNKNSearch[i] ].intensity = 2000;
}
}
pcl::io::savePCDFileASCII("저장경로", *cloud);
cout<<"Save knnSearch Point Cloud is Done!"<<endl;
}
정직하게 10개가 찾아지는 것을 확인할 수 있다..^^
하나 주의깊게 볼 점은, 이때는 원본 point 들 중 knn cluster 된 것들의 인덱스 정보를 vector<int> 에 담아줄 뿐만 아니라, search point 와의 거리를 vector<float> 에도 담아준다는 점이다.
그래서 인덱스 담아줄 std::vector<int> pointIdxNKNSearch; 랑 거리 정보 담아줄 std::vector<float> pointNKNSquaredDistance; 이렇게 두개 선언해줬다.
2.3 Radius Search
knn과 유사하게 탐색할 반지름을 설정해주면 된다. 얘도 마찬가지로 인덱스 정보와, search point 까지와의 거리를 거리로 반환해준다.
그래서 std::vector<int> pointIdxRadiusSearch; 랑 std::vector<float> pointRadiusSquaredDistance; 선언 해준다.
void usingRadiusSearchMethod()
{
float resolution = 128.0f;
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud;
cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
cloud->reserve(200000000);
pcl::io::loadPCDFile<pcl::PointXYZI>("원본 pc", *cloud);
pcl::octree::OctreePointCloudSearch<pcl::PointXYZI> octree (resolution);
octree.setInputCloud (cloud);
octree.addPointsFromInputCloud();
// Neighbors within radius search
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
float radius = 256.0f * rand () / (RAND_MAX + 1.0f);
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
if (octree.radiusSearch (searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (std::size_t i = 0; i < pointIdxRadiusSearch.size (); ++i){
std::cout << " " << (*cloud)[ pointIdxRadiusSearch[i] ].x << " " << (*cloud)[ pointIdxRadiusSearch[i] ].y << " " << (*cloud)[ pointIdxRadiusSearch[i] ].z << " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
(*cloud)[ pointIdxRadiusSearch[i] ].intensity = 2000;
}
}
pcl::io::savePCDFileASCII("저장경로", *cloud);
cout<<"Save RadiusSearch Point Cloud is Done!"<<endl;
}
마니 잘 찾는다.
