논문 톺아보기
이미지의 출처는 논문입니다.
object detection은 물체가 무엇인지 분류하고 어디에 위치하는지 알아내는 기술입니다.
코드 구현: 링크텍스트
Abstract
[논문 전 object detection]
Detection을 하기 위해서 분류기를 재설정합니다.
[논문 object detection]
논문에서 말하는 object detection의 특징은 separated bounding boxes and associated class probabilities을 갖고 있습니다.
A single network는 전체 이미지에서 클래스의 확률과 바운딩박스들을 한 번의 평가로 직접적으로 예측이 가능합니다.
Detection의 파이프라인은 a single network이며, 이것은 최적화가 가능하고 검출을 할 때 end to end 기법을 이용합니다.
[논문 기술(YOLO) 특징]
- Unified architecture is fast
- YOLO모델은 이미지를 1초에 45프레임으로 진행합니다.
- Smaller version, 1초에 155프레임으로 진행합니다.
- Localization errors가 높은 편입니다.
- False positives on backgroud를 에측할 때 수치는 낮
다.
- 물체의 일반적인 특징으터 배웁니다.
- 수행 능력이 단연 갑입니다.
Introduction
- Object detection
object detection은 물체가 무엇인지 분류(classification) 하고 어디에 위치하는지 알아내는 기술(localization)을 동시에 진행합니다.
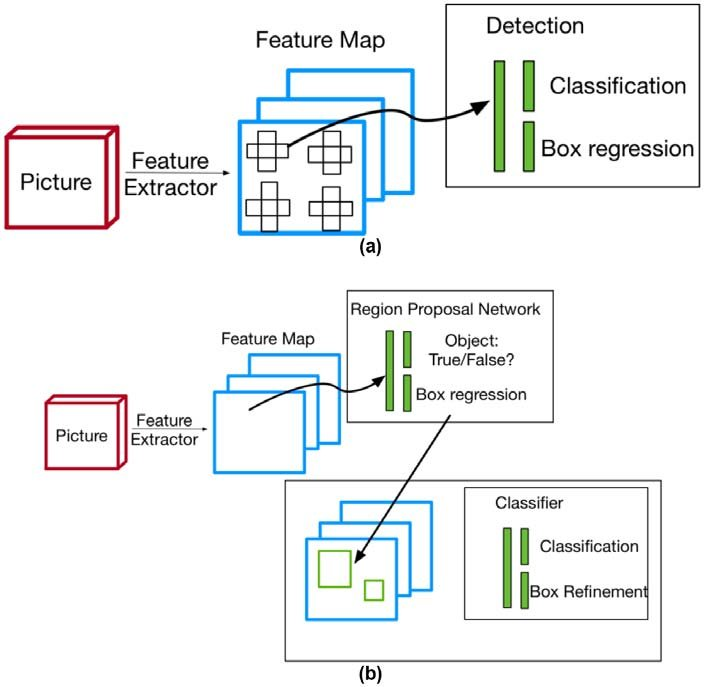
- DPM, R-CNN
-
2-stage Detector
- classification 과 localization을 순차적 진행함.
- 느리고 최적화가 어려움
- YOLO

-
2-stage detector의 문제 해결
-
빠르다,(45fps~150fps)
-
Classification 과 localization이 동시에 진행
-
Single convolutional network
-
Bounding box좌표와 class로 확률 계산
-
-
전체적인 이미지를 보고 추론하기에 객체 인식 오류가 적음
-
새로운 도메인에 적용하기 쉽게 일반화된 표현 학습
-
regression관점으로 본다
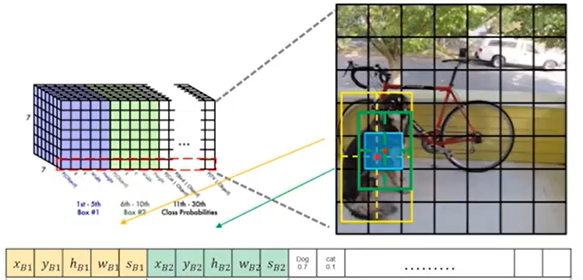
Unified Detection
- YOLO Model
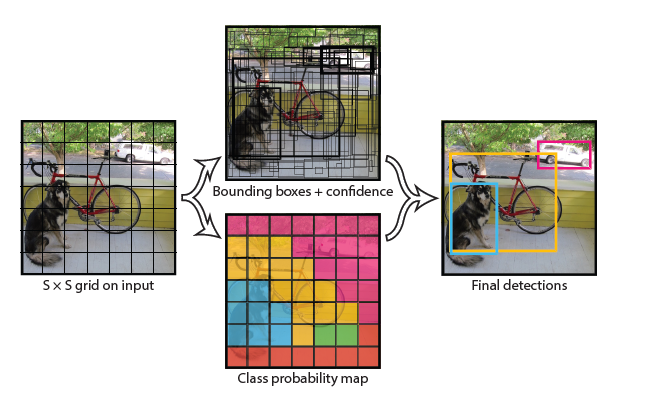
-
SxS grid on input
- 이미지의 크기(S=7)
- Grid cell 중심을 가지는 bounding box들이 존재
-
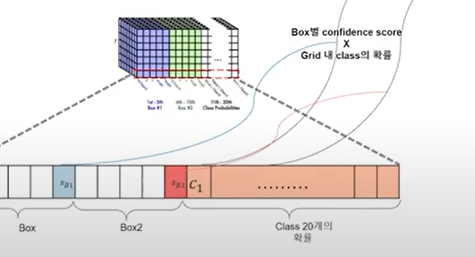
Bounding boxes + confidence
-
Bounding box작업
-
각 grid마다 담당하는 bounding box가 2개
-
Box의 중심좌표:x,y
-
Box의 높이,너비 : h,w
-
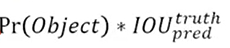
Confidence score
객체가 존재하면 IOU, 아니면 0

-
- Class probability map
박스들과 별도로 각 grid마다 class 확률 계산 후 가장 높은 확률의 class가 정해집니다.(grid관련 작업)

- Find detections
위의 두 작업을 통해서 객체를 분류하고 위치를 색깔별로 바운딩 박스하여서 결과를 나타냅니다.
- Network Design
- GoogLeNet기반

*아래의 module을 사용하지 않고 1x1 reduction layer로 대체
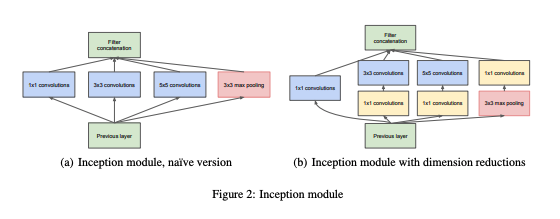
*YOLO의 네트워크 디자인
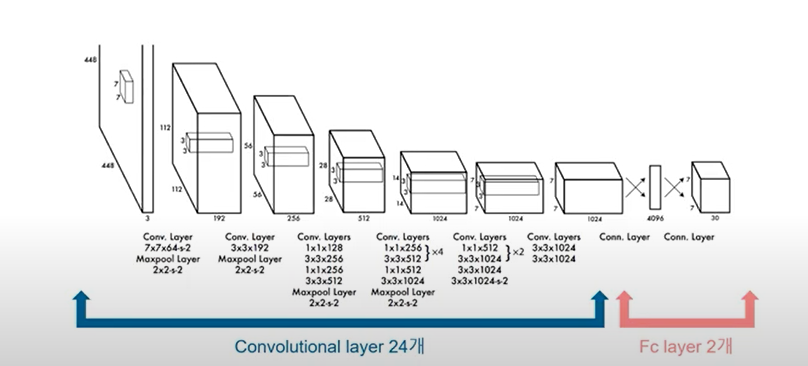
- Training
*첫 화살표 전은 Feature extract이고 이후는 Object detection

3-1) Feature Extract
- Conv layer 20개는 ImageNet으로 사전학습(pretrain)이 됨
3-2) Object detection
-
pretrain이 된 모델이 레이어를 추가하면 성능이 좋아짐
-
Conv layer 4개 , FC layer 2개를 추가합니다(가중치는 random 초기화)
-
Input size 증가(224->448)를 통해 해상도 향상
-
모든 레이어는 leaky ReLU(except last layer)
3-3)그림과 함께 보는 예시
Box의 정규화가 된 x,y,h,w사용하기
-
전체 이미지에 대해 정규화(w,h)
-
Grid에 대해 정규화(x,y)
- Loss function
4-1) Bounding box coordinate regession
*식

*i번째 그리디, j번째 박스에 물체가 있는 경우

*localization에 가중치를 주기 위한 loss term

*크기에 따른 error를 줄이기 위해 높이, 너비에 대해 루트 값을 주어 크기를 줄여줌

4-2) Confidence score prediction
*식
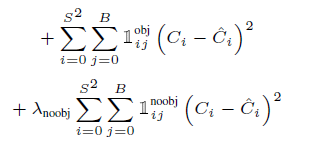
*i번째 그리드, j번째 box 내 물체가 있는 경우

*i번째 그리드, j번째 bpx 내 물체가 없는 경우

*0.5일 시, 객체가 없는 no object box가 더 많이 존재하고 noobj와 obj의 균형을 맞춰주는 용도

*Object의 유무에 따라 confidence score값에 다름
4-3) Class score prediction
- 물체가 없는 경우(background로 간주)
*식

*i번째 그리디 내 물체가 있는 경우

- Hyperparameter
-
epochs = 135
-
batch_size= 64
-
momentum=0.9
-
decay = 0.0005
-
Learning rate = [0.001,0.01,0.01,0.001]
- 1~75 epoch: 0.001 -> 0.01 유지
- 76~105 epoch: 0.001 유지
- 106~135 epoch: 0.0001 유지
-
Overfitting by dropout, augmentation
-
dropout rate = 0.5
-
data augmentation
- 원본의 20% scaling,translation
- 무작위하게 exposure, saturation * 1.5 in HSV
- Test
bounding box의 class가 나타날 확률과 얼마나 잘 위치하고 있는지를 Class-specific confidence score를 사용하여 나타낸다.
*식

*그림으로 보는 과정


- Limitation
7-1) Bounding box의 형태가 예상치 못한 모양으로 새롭거나 독특하면 예측을 잘 못합니다.
7-2) 각 grid cell은 하나의 클래스밖에 예측 못함
-
물체가 겹치면 제대로 예측 불가
-
크기가 작으면 제대로 인식 불가
7-3) Bounding box의 크기와 상관 없이 error처리
-
error가 작으면 큰 박스의 영향 X
-
error가 작아도 작은 박스의 IoU에 영향 O
Experiments
논문에서 나온 결과 와 기존의 실험 결과 비교
- Comparision
*FPS:초당 프레임수
*mAP: 물체 클래스가 여러 개인 경우 각 클래스의 AP를 구하고 합한 다음에 물체 클래스의 개수로 나눠줘서 알고리즘의 성능을 평가하는 지표

-
DPM vs YOLO
- 기존 DPM보다 빠르고 mAP가 3배 높다
-
Faster R-CNN VS LOLO
- mAP는 낮으나 FPS가 6배 높음
-
GoogLeNet vs VGG-16
- 같은 YOLO모델에 convnet을 vgg16으로 바꾼다
- map가 3증가, FPS는 2배 차이
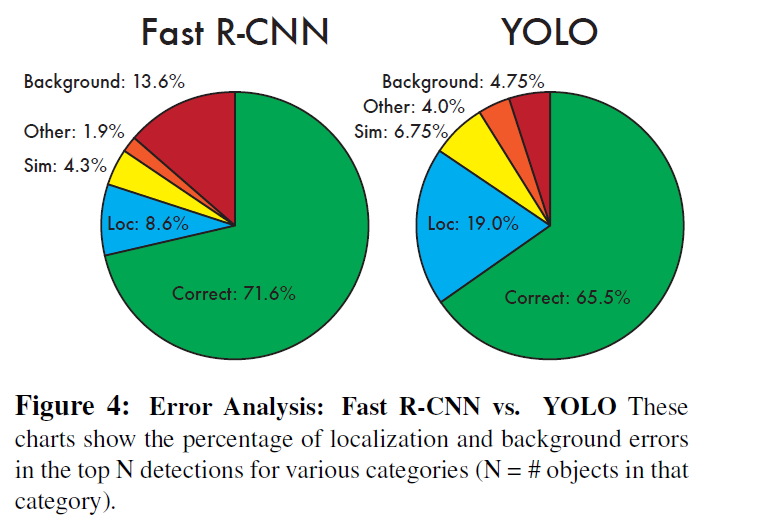
- Error Analysis
-
기준
- Correct: class가 정확하고 IoU가 0.5보다 크다
- Localization: class가 정확하고 0.1 < IoU < 0.5
- Smilar: class가 유사하고 IoU > 0.1인 경우
- Other: class가 틀리고 IoU > 0.1
- Background: 어느 객체여도, IoU < 0.1
-
Fast R-CNN: Background Error = error * 0.5
-
YOLO: Background Error = Fast R-CNN * (1/3)
*위에서 말했다시피 YOLO의 error의 대부분은 localization이기에 background error의 비율이 낮음
- Fast R-CNN + YOLO

-
Fast R-CNN: localization error 감소
-
YOLO: background error 감소
- 두 장점을 합치면 mAP가 3.2%증가
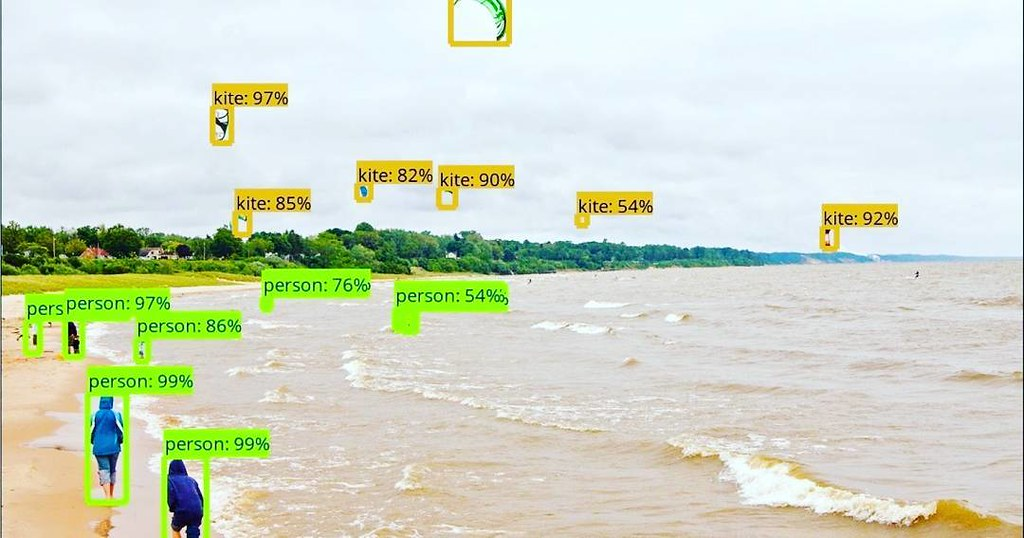
- Generalizability
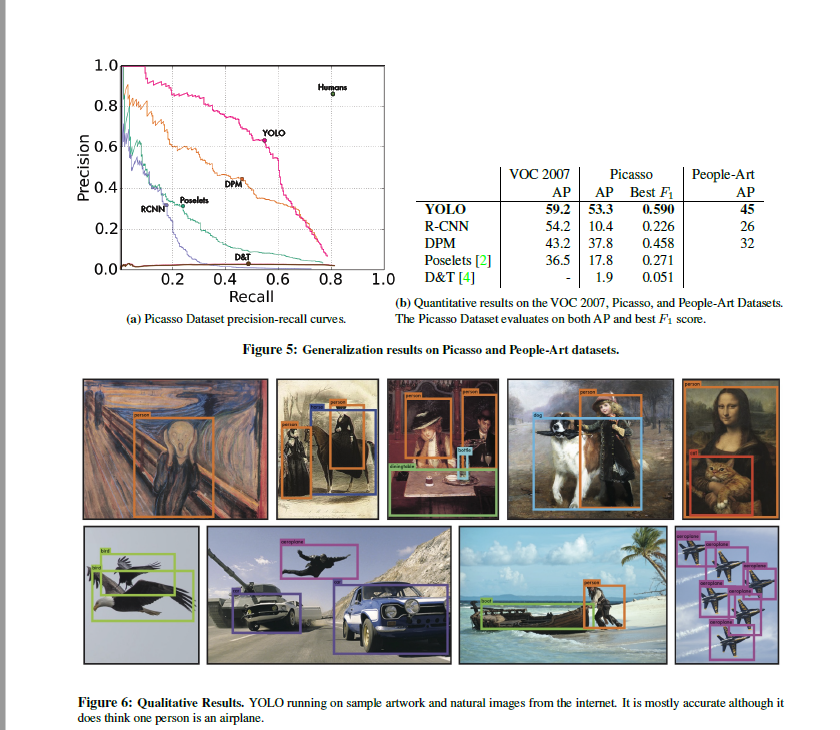
위의 그림과 같이, 사진뿐만 아니라 그림에서도 object detection이 가능합니다.
