아스키 이미지 만들기
양자화는 영상이 얼마나 섬세하게 색을 표현할 수 있는지 결정합니다.
이번 문제에서는 영상을 흑백으로 바꾸어보고 주어진 레벨에 맞게 양자화를 진행합니다. 그리고 명도에 따라 아스키 문자를 할당하여 콘솔로 영상을 출력할 수 있는 간단한 아스키 영상을 만들어봅시다.
아래 함수 정의를 참고하여, 문제를 해결합니다.
함수 정의
img2ascii(img, L, ascii_string)
파라미터
img : OpenCV로 읽은 이미지
L : 양자화 레벨, 2<=L<=162 <= L <= 162<=L<=16 사이의 정수
ascii_string : 실습에서 주어지는 명도를 대신 표현할 문자열
반환값 : numpy.chararray 타입의 문자로 표현된 이미지
print_ascii_img(ascii_img)
기능 : 파라미터로 받은 ascii_img를 출력해주는 함수
파라미터
ascii_img : 문자로 이루어진 numpy.chararray 타입 이미지
반환값 : 없음
지시사항
예시 영상을 읽고 흑백 영상으로 바꿉니다.
주어진 양자화 레벨 ‘L’에 맞게 양자화를 진행합니다.
양자화된 명도 ‘i’를 주어진 문자의 인덱스에 해당하는 문자로 치환하세요.
치환된 이미지를 print()로 출력하여 결과를 확인합니다.
Tips!
img2ascii() 함수에서 변수 L을 이용해 양자화 후 ascii_string의 인덱스에 해당하는 문자로 치환하면 됩니다.
import numpy
import cv2
# 아스키 이미지를 출력하는 함수입니다.
def print_ascii_img(ascii_img):
for i in range(ascii_img.shape[0]):
for j in range(ascii_img.shape[1]):
print(ascii_img[i, j].decode("utf-8"), end="")
print()
# 이미지를 아스키로 변환하는 함수입니다.
def img2ascii(img, L, ascii_string):
ascii_img = numpy.chararray(img.shape)
qunit=256//L
# 양자화를 수행하고 ascii 문자로 명도를 표현하세요.
for i in range(img.shape[0]):
for j in range(img.shape[1]):
index=img[i,j]// qunit
ascii_img[i,j]=ascii_string[index]
return ascii_img
if __name__ == "__main__":
ascii_string = "@#BPDQOUo=+*~-`."
# 주어진 이미지를 읽어옵니다.
img = cv2.imread("./lena.jpg", cv2.IMREAD_GRAYSCALE)
# 함수를 호출하여 결과를 확인합니다.
ascii_img = img2ascii(img, 16, ascii_string)
print_ascii_img(ascii_img)액자 맞추기
어떤 액자 퍼즐이 있습니다. 이 퍼즐은 2x2 조각으로 구성이 되어있습니다.
image
퍼즐 조각은 아래처럼 2x2 조각으로 나눠져 있고 각 조각의 순서는 아래와 같습니다.
image
주어진 piece_order 리스트는 현재 액자의 조각이 맞춰져 있는 순서를 나타내는 리스트입니다.
예를 들어 piece_order = [3, 2, 1, 0] 이라면 아래와 같은 의미를 나타냅니다.
0번 조각이 위치해야 할 곳에 3번 조각이 있음
1번 조각이 위치해야 할 곳에 2번 조각이 있음
2번 조각이 위치해야 할 곳에 1번 조각이 있음
3번 조각이 위치해야 할 곳에 0번 조각이 있음
액자 퍼즐을 원래대로 맞춰주세요.
지시사항
주어진 영상과 조각 순서를 보고 원본 영상으로 복원한 영상을 반환하는 함수를 구현하세요.
출력 예시
image
Tips!
조각 순서에 따라 현재 위치와 해당 조각이 이동해야 할 위치로 나눠서 생각해보세요.
인덱스를 나눴다면 이제 인덱스를 입력받아 조각의 위치를 조정하고, 조정된 이미지를 반환하는 함수를 구현해서 문제를 해결할 수 있습니다.
import sys
import cv2
from elice_utils import EliceUtils
elice_utils = EliceUtils()
# 주어진 영상과 조각 순서를 보고 원본 영상(출력 예시 참고)으로 복원한 영상을 반환하는 함수를 구현하세요.
def solve_puzzle(img, piece_order):
for to_i,from_i in enumerate(piece_order):
if to_i ==from_i:
continue
pp=piece_order.index(to_i)
piece_order[to_i]=piece_order[pp]
piece_order[pp]=from_i
r,c=img.shape[0]//2,img.shape[1]//2
p1=tuple(map(lambda x:x*r,divmod(from_i,2)))
p2=tuple(map(lambda x:x*r,divmod(to_i,2)))
tmp=img[p1[0]:p1[0]+r,p1[1]:p1[1]+c].copy()
img[p1[0]:p1[0]+r,p1[1]:p1[1]+c]=img[p2[0]:p2[0]+r,p2[1]:p2[1]+c]
img[p2[0]:p2[0]+r,p2[1]:p2[1]+c]=tmp[:]
return img
if __name__ == "__main__":
# 퍼즐의 순서가 리스트 형태로 입력됩니다.
piece_order = list(map(int, list(sys.argv[1].split(','))))
# 이미지를 불러옵니다.
img = cv2.imread("./puzzle.jpg", cv2.IMREAD_GRAYSCALE)
# 복원 결과를 확인합니다.
result_img = solve_puzzle(img, piece_order)
cv2.imwrite('result.jpg', result_img)
elice_utils.send_image('result.jpg')이미지의 명도 분포 알아보기
영상은 색의 밝기로 표현이 됩니다.
OpenCV를 사용하면 명도가 0~255 사이의 값들로 표현이 됩니다.
우리는 특정 명도에 얼마나 색이 분포해있는지 알고 싶습니다. 예를 들어 명도가 10인 화소는 영상에서 몇 개나 되는지 세어보고 개수가 전체 화소의 90%에 해당한다면 이 영상은 저조도에서 촬영된 영상이라는 추론을 할 수 있게 됩니다.
그래서 우리는 이번에 특정 명도에 해당하는 영상 화소 수를 세어 명도별 영상 화소 수를 그래프로 그려보려 합니다.
흰색 바탕의 256 × 화소 수 크기의 numpy.ndarray를 만들고 이 이 영상에 그래프를 그리는 함수를 작성해주세요.
image
지시사항
입력된 영상의 히스토그램을 반환하는 함수를 완성하세요.
출력 예시
image
Tips!
numpy.ones 함수로 원소값이 1인 행렬을 만든 뒤 255를 곱하면 원소값이 255가 되어 백색 바탕 이미지를 만들 수 있습니다.
OpenCV의 cv2.line()함수를 이용하면 손 쉽게 라인을 그릴 수 있습니다.
전체 화소수는 image의 shape 변수를 이용해서 구할 수 있습니다. shape은 아래와 같기 때문에 튜플의 모든 원소값을 곱한 것이 이미지가 가지고 있는 전체 화소 수가 됩니다.
shape = (row, column, channel)
Copy
예를 들어 명도가 128인 화소는 전체 이미지 중에 70번 등장했을 때 아래 처럼 코드를 쓸 수 있습니다.
cv2.line(img, (total_pixel, 128), (total_pixel - 70, 128))
Copy
우리가 아는 그래프는 영상의 좌측하단 모서리가 (0, 0) 입니다. 그러나 영상을 표현하는 행렬의 시작점은 좌측 상단이 (0, 0) 이 됨을 유의하세요.
import sys
import cv2
import numpy
from elice_utils import EliceUtils
elice_utils = EliceUtils()
# 영상을 입력으로 받아 영상의 히스토그램 영상을 리턴하는 함수를 만드세요.
def draw_histogram(img):
total_pixel=img.shape[0]*img.shape[1]
histogram_img=numpy.ones((total_pixel,256))*255
h=[0 for i in range(256)]
for i in range(img.shape[0]):
for j in range(img.shape[1]):
h[img[i,j]]+=1
for i,f in enumerate(h):
start=(i,total_pixel-1)
end=(i,total_pixel-f-1)
cv2.line(histogram_img,start,end,(0),2,cv2.LINE_AA)
return histogram_img
if __name__ == "__main__":
# 이미지를 읽어옵니다.
img = cv2.imread("./night.jpg", cv2.IMREAD_GRAYSCALE)
# 결과를 확인합니다.
histogram_img = draw_histogram(img)
histogram_img = cv2.resize(histogram_img, (256, 256))
cv2.imwrite('result.jpg', histogram_img)
elice_utils.send_image('result.jpg')이진화 응용 : 컬러 영상에서 특정 색상영역만 추출하기
앞선 실습에서는 영상을 단순히 임곗값을 가지고 아래처럼 0 또는 255 명도로 사상하였습니다.
img[i, j] = 255 if img[i, j] >= threshold else 0
이를 응용해서 컬러 영상에서 특정 색의 영역대는 명도를 255로 만들고 영역 밖의 색은 명도를 0으로 표시하려고 합니다.
예를 들어 R 채널에서 100 ~ 200 구간에 있는 명도만 살리고 싶은 경우 아래와 같이 표현할 수 있습니다.
img[i, j, 0] = 255 if img[i, j, 0] >= range_start and img[i, j, 0] <= range_end else 0
임곗값으로 아래와 같이 주어질 때, 특정 색상영역을 추출하는 실습을 해봅니다.
입력 : [50, 255, 10, 100, 200, 255]
지시사항
컬러 이미지에서 특정 색상영역을 추출한 결과를 반환하는 함수를 완성하세요.
주어지는 입력 [50, 255, 10, 100, 200, 255]은 다음을 의미합니다.
R채널에서는 [50, 255] 사이의 픽셀은 255로, 범위 밖의 명도는 0으로 표시합니다.
G채널에서는 [10, 200] 사이의 픽셀은 255로, 범위 밖의 명도는 0으로 표시합니다.
B채널에서는 [200, 255] 사이의 픽셀은 255로, 범위 밖의 명도는 0으로 표시합니다.
주어지는 임계값에 따라 특정 색상영역을 추출한 이미지를 반환하세요.
import sys
import numpy
import cv2
from elice_utils import EliceUtils
elice_utils = EliceUtils()
# img에서 특정 색상영역을 추출한 결과를 반환하는 함수를 완성하세요.
def inRange(img, thresholds):
"""
thresholds는 컬러 채널별 살리고 싶은 명도의 범위가 들어있습니다.
예를 들어 아래와 같이 입력이 들어온 경우,
thresholds = [50, 255, 10, 100, 200, 255]
구간 경계선을 포함하여,
R채널에서는 [50, 255]사이의 픽셀은 255로,범위 밖의 명도는 0으로 표시합니다.
G채널에서는 [10, 200]사이의 픽셀은 255로,범위 밖의 명도는 0으로 표시합니다.
B채널에서는 [200, 255]사이의 픽셀은 255로,범위 밖의 명도는 0으로 표시합니다.
"""
for c in range(img.shape[2]):
for i in range(img.shape[0]):
for j in range(img.shape[1]):
I=img[i,j,c]
s=thresholds[c*2]
e=thresholds[c*2+1]
if s<=I and I<=e:
n_I=255
else:
n_I=0
img[i,j,c]=n_I
return img
if __name__ == "__main__":
# 컬러 채널별 살리고 싶은 명도의 범위가 주어집니다.
thresholds = list(map(int, sys.argv[1].split(",")))
# 컬러 이미지를 불러옵니다.
img = cv2.imread("elice.png", cv2.IMREAD_COLOR)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 특정 색상영역을 추출한 결과를 확인해봅니다.
colorFiltered = inRange(img, thresholds)
colorFiltered = cv2.cvtColor(colorFiltered, cv2.COLOR_BGR2RGB)
cv2.imwrite("result.jpg", colorFiltered)
elice_utils.send_image('result.jpg')
프리윗 필터
OpenCV에는 필터를 영상에 쉽게 적용해주는 함수가 있습니다.
cv2.filter2D(src, ddepth, kernel, dst=None, anchor=None, delta=None, borderType=None) -> dst
• src : 입력 영상
• ddepth : 출력 영상 데이터 타입. (e.g) cv2.CV_8U, cv2.CV_32F, cv2.CV_64F, -1을 지정하면 src와 같은 타입의 dst 영상을 생성합니다.
• kernel : 필터 마스크 행렬. 실수형.
• anchor: 고정점 위치. (-1, -1)이면 필터 중앙을 고정점으로 사용
• delta : 추가적으로 더할 값
• borderType : 가장자리 픽셀 확장 방식
• dst : 출력 영상
이 함수를 이용하여 프리윗 필터를 영상에 적용시켜 봅시다.
지시사항
prewitt() 함수를 완성하세요.
dst_vertical_edge 변수에 수직 프리윗 필터를 적용하세요.
dst_horizontal_edge 변수에 수평 프리윗 필터를 적용하세요.
img에 수직/수평 프리윗 필터를 적용시킨 두 이미지 합을 반환하세요.
회선처리
앞장에서는 OpenCV가 제공하는 필터 함수를 이용해 프리윗 필터를 적용해보았습니다.
이번에는 회선처리 함수를 직접 구현하여 프리윗 필터를 적용해보는 연습을 해보겠습니다.
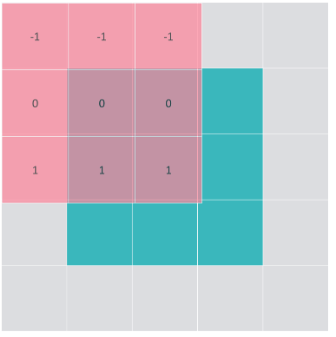
구현의 편리함을 위해 아래와 같은 5 × 5 이미지가 있을 때, 경계선은 회선처리가 어려우므로 경계선을 제외한 내부 화소만 회선처리 하도록 합니다.
이미지의 경계가 아닌 픽셀
출처:엘리스경계를 제외한 회선처리
출처:엘리스지시사항
주어진 커널을 입력 img에 회선 처리한 이미지 dst를 반환하는 함수 convolution2D()를 완성하세요.
출력 예시
출처:엘리스Tips!
내부 화소만 순회하기 : 문제에서 회선처리를 쉽게 하기 위해 경계선 화소들은 제외를 합니다.
따라서 화소 순회를 할 때, 필터의 중점 좌표만큼 시작과 끝 범위를 정해주면 내부 경계선을 제외한 내부 화소만 순회가 가능합니다.
center_r = kernel.shape[0] // 2
center_c = kernel.shape[1] // 2
for i in range(center_r, img.shape[0] - center_r):
for j in range(center_c, img.shape[1] = center_c):
Copy
4중 for 반복문이 사용됩니다. 첫 번째와 두 번째 반복문은 영상의 화소 순회를 하는 데 쓰이고, 세 번째와 네 번째 반복문은 필터의 요소 순회를 하는 데 쓰입니다.
