SLAM 프로젝트가 시작되었다. 총 2주로 진행되는 프로젝트로 각 팀마다 부여된 미션이 달랐다.
우리팀이 받은 미션은 아래와 같다
고객사의 요구
우리는 주차를 할 때, 주차장의 모습을 유저에게 실시간으로 보여주고 싶습니다.
ProSLAM을 사용해서 얻은 지도를 보니, 이게 어디를 보여주는 건지도 모르겠더군요.
1. 주변 환경을 예쁘게 보여줄 수 있는 VSLAM 알고리즘과,
2. 주변 환경을 잘 보여주는 시각화 툴을 만들어주세요. (실시간 시각화가 아니어도 됩니다)
위 고객사의 요구를 만족시킬 SLAM 알고리즘을 만들고 구현하는 것이 이번 프로젝트의 목적이다.
프로젝트 빌딩
VSLAM
주차 시, 주변 물체의 형태를 구분할 수 있을 정도의 Map를 생성해야하므로 Direct Method를 생각했으나, 위 방법은 우리가 배운 지식만으로 2주안에 구현이 불가하여
Feature-based SLAM으로 Dense 한 Map을 구현하는 방법을 고민하였다.
Feature-based SLAM엔, 총 3가지 Mono, Stereo, RGB-D 방법이 존재하며, 이중 Dense한 Map을 구현할 수 있는 방법은 오로지 RGB-D방법 뿐이다.
RGB-D Data는 RGB-D카메라에서만 구할 수 있으나, 고객사의 차량에는 RGB-D카메라가 부착되지 않았다. RGB-D Camera는 OutDoor환경에서, 태양광에 의한 간섭으로 제대로 된 데이터를 얻기 힘들기 때문에, 자율주행 차량에는 부착되지 않기 때문이다.
Depth Image를 얻기 위해 카메라와 3-D LIDAR의 센서 퓨전을 고안하였다. 라이다의 정보로 Depth값을 얻어내 딥러닝을 통해 Dense한 형태의 Depth이미지를 얻어내 RGB 이미지와 Depth이미지를 합쳐 Pseudo-RGBD SLAM 방식을 고안하였다.
Surround View Monitoring
주차 시 사용될 시각화 툴로 SVM 모듈을 개발하기로 하였다.
작업 진행
SVM
차량에 부착된 카메라를 사용해, 각 이미지들을 Bird-eye-view 형태로 변환하고 여러개의 카메라에서 얻은 BIV이미지를 합쳐 SVM 모듈을 개발하는 중이다.

Sensor Fusion
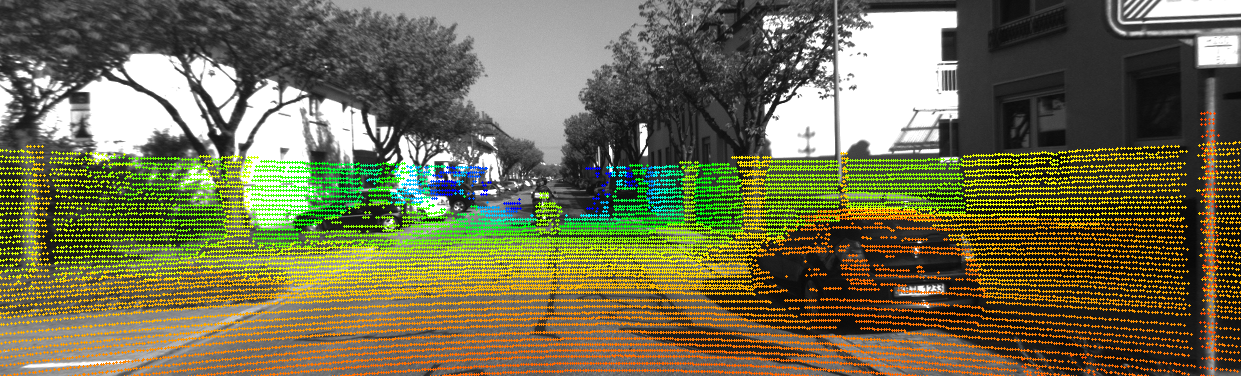
Sparse depth map to Dense depth map
PEnet 모델을 사용하여 Dense depth map을 얻어내었다.