텐서플로 허브와 전이학습
Base 모델 만들기
1. 데이터 풀기
- 폴더명이 식물이름_healty, 식물이름_질병이름으로 저장되어 있음
- 사진들의 개수가 밸런스가 맞지는 않는다.
from google.colab import drive
drive.mount('/content/drive')
!unzip -qq '/content/drive/MyDrive/데이터스쿨/실습파일/DL/data/dataset.zip' -d './dataset'2. 폴더 정리
import os
import shutil
original_dataset_dir = './dataset'
classes_list = os.listdir(original_dataset_dir) #폴더이름에서 클래스 이름 가져오기
base_dir = './splitted'
os.mkdir(base_dir)
# 데이터 정리를 위한 목록 및 폴더 생성
train_dir = os.path.join(base_dir, 'train')
os.mkdir(train_dir)
validation_dir = os.path.join(base_dir, 'val')
os.mkdir(validation_dir)
test_dir = os.path.join(base_dir, 'test')
os.mkdir(test_dir)
# 폴더 목록 만들기
for cls in classes_list:
os.mkdir(os.path.join(train_dir, cls))
os.mkdir(os.path.join(validation_dir, cls))
os.mkdir(os.path.join(test_dir, cls))3. 데이터 현황 확인
import math
for cls in classes_list:
# './dataset' + 클래스
path = os.path.join(original_dataset_dir, cls)
# path에 있는 파일 이름 저장
fnames = os.listdir(path)
# 6:2:2 = train, val, test floor -> 정수형으로
train_size = math.floor(len(fnames) * 0.6)
validation_size = math.floor(len(fnames) * 0.2)
test_size = math.floor(len(fnames) * 0.2)
# 처음부터 60%까지
train_fnames = fnames[:train_size]
print('Train size(',cls,')', len(train_fnames))
for fname in train_fnames:
src = os.path.join(path, fname)
dst = os.path.join(os.path.join(train_dir, cls), fname)
# 파일 copy
shutil.copyfile(src, dst)
validation_fnames = fnames[train_size:(validation_size + train_size)]
print('Validation size(',cls,'): ', len(validation_fnames))
for fname in validation_fnames:
src = os.path.join(path, fname)
dst = os.path.join(os.path.join(validation_dir, cls), fname)
shutil.copyfile(src, dst)
test_fnames = fnames[(train_size + validation_size):(validation_size + train_size + test_size)]
print('Test size(',cls,'): ', len(test_fnames))
for fname in test_fnames:
src = os.path.join(path, fname)
dst = os.path.join(os.path.join(test_dir, cls), fname)
shutil.copyfile(src, dst)4. 학습 준비
import torch
import os
USE_CUDA = torch.cuda.is_available()
DEVICE = torch.device('cuda' if USE_CUDA else 'cpu')
BATCH_SIZE = 256
EPOCH = 305. 데이터 loader
num_workers: dataset의 데이터를 gpu로 전송할 때 필요한 전처리를 수행할 때 사용하는 subprocess의 수num_workers의 수를 늘리면 병렬처리를 통해 더 빠르게 gpu에 정보를 전달할 수 있어 성능이 좋아진다.- 하지만 num_workers의 수가 너무 크면 다른 일을 수행하는 데 사용할 자원이 적어져 성능이 안좋아질 수 있다. 따라서 적절한 값을 찾기 위해 하이퍼파라미터 튜닝을 하듯 접근한다.
import torchvision.transforms as transforms
from torchvision.datasets import ImageFolder
# 사진크기가 제가각이라서 64*64
transform_base = transforms.Compose([transforms.Resize((64, 64)), transforms.ToTensor()])
# 폴더를 전체를 읽기 -> 폴더 하나를 클래스로 매치 -> 라벨=폴더이름
train_dataset = ImageFolder(root='./splitted/train', transform=transform_base)
val_dataset = ImageFolder(root='./splitted/val', transform=transform_base)
from torch.utils.data import DataLoader
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=BATCH_SIZE,
shuffle=True,
num_workers=4
)
val_loader = torch.utils.data.DataLoader(val_dataset,
batch_size=BATCH_SIZE,
shuffle=True,
num_workers=4
)6. 모델 수립
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 32, 3, padding=1)
self.pool = nn.MaxPool2d(2,2)
self.conv2 = nn.Conv2d(32, 64, 3, padding=1)
self.conv3 = nn.Conv2d(64, 64, 3, padding=1)
self.fc1 = nn.Linear(4096, 512)
self.fc2 = nn.Linear(512, 33)
def forward(self, x):
x = self.conv1(x)
x = F.relu(x)
x = self.pool(x)
# 훈련할 때만 사용하려고 training
x = F.dropout(x, p=0.25, training=self.training)
x = self.conv2(x)
x = F.relu(x)
x = self.pool(x)
x = F.dropout(x, p=0.25, training=self.training)
x = self.conv3(x)
x = F.relu(x)
x = self.pool(x)
x = F.dropout(x, p=0.25, training=self.training)
x = x.view(-1, 4096) #flatten과 비슷한 효과
x = self.fc1(x)
x = F.relu(x)
x = F.dropout(x, p=0.5, training=self.training)
x = self.fc2(x)
return F.log_softmax(x, dim=1)
model_base = Net().to(DEVICE)
optimizer = optim.Adam(model_base.parameters(), lr=0.001)7. train, evaluate 함수
width resource→ 자원을 받지 않아도 with 구문 끝나면 끝난다. 에러를 방지해주는 역할을 한다.
def train(model, tranin_loader, optimizer):
model.train()
for bath_idx, (data, target) in enumerate(train_loader):
data, target = data.to(DEVICE), target.to(DEVICE)
optimizer.zero_grad()
output = model(data)
loss = F.cross_entropy(output, target)
loss.backward()
optimizer.step() #weight 업데이트
def evaluate(model, test_loader):
model.eval()
test_loss = 0
correct = 0
# 가중치 업데이트 x , 평가 모드
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(DEVICE), target.to(DEVICE)
output = model(data)
test_loss += F.cross_entropy(output, target, reduction='sum').item()
pred = output.max(1, keepdim=True)[1]
correct += pred.eq(target.view_as(pred)).sum().item()
test_loss /= len(test_loader.dataset)
test_accuracy = 100. * correct / len(test_loader.dataset)
return test_loss, test_accuracy8. best 모델을 뽑아 base 모델로 저장
from torch.serialization import validate_cuda_device
import time
import copy
def train_baseline(model, train_loader, val_loader, optimizer, num_epochs=30):
best_acc=0.0
# 정확도가 높은 모델의 weight 저장
best_model_wts = copy.deepcopy(model.state_dict())
for epoch in range(1, num_epochs + 1):
since = time.time()
train(model, train_loader, optimizer)
train_loss, train_acc = evaluate(model, train_loader)
val_loss, val_acc = evaluate(model, val_loader)
if val_acc > best_acc:
best_acc = val_acc
best_model_wts = copy.deepcopy(model.state_dict())
time_elapsed = time.time() - since
print('----------------------------epoch {}-----------------------------'.format(epoch))
print('train Loss: {:.4f}, Accuracy: {:.2f}%'.format(train_loss, train_acc))
print('val Loss: {:.4f}, Accuracy: {:.2f}%'.format(val_loss, val_acc))
print('Completed in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
model.load_state_dict(best_model_wts)
return model
base = train_baseline(model_base, train_loader, val_loader, optimizer, EPOCH)
torch.save(base, 'baseline.pt')전이학습, 미세조정
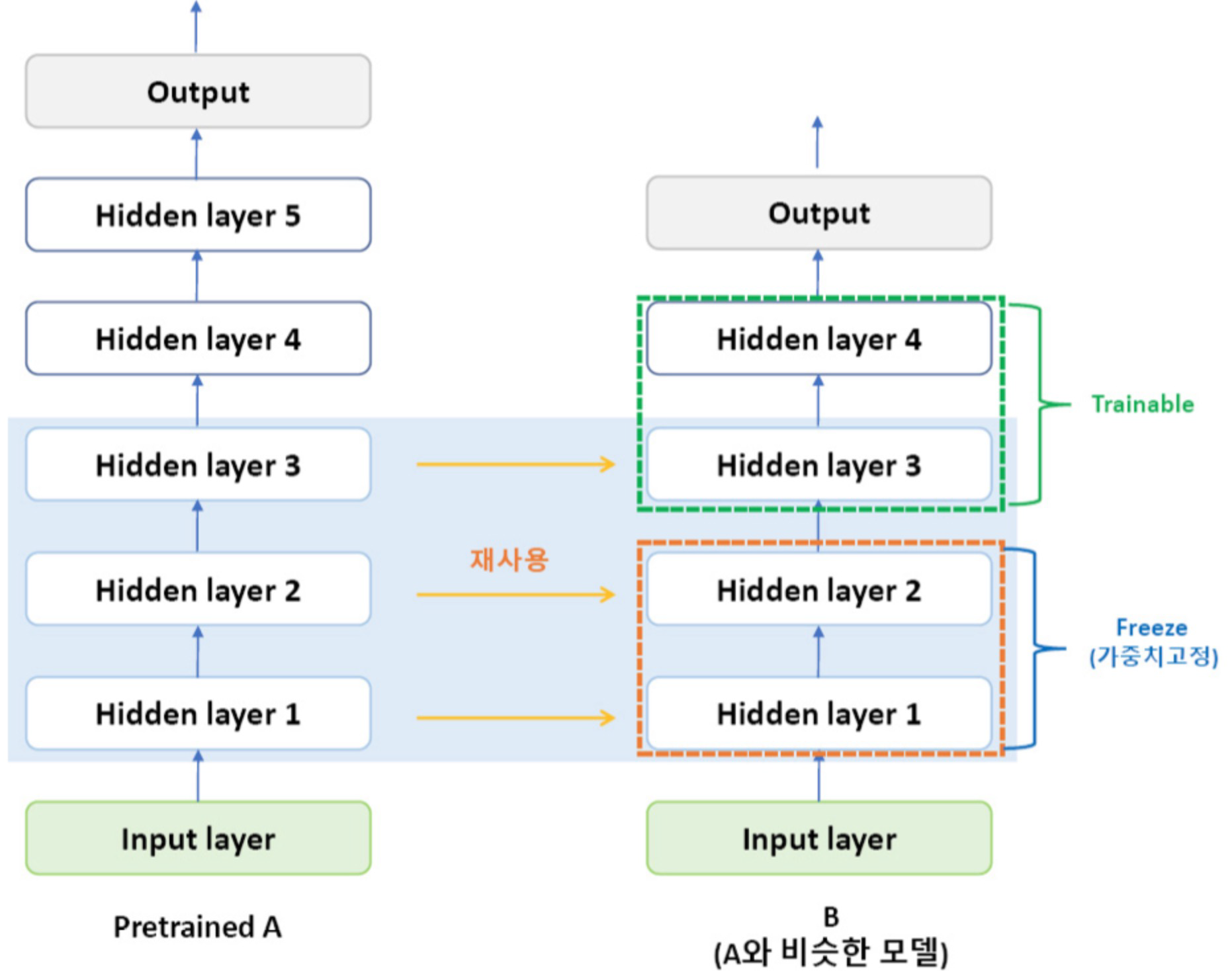
전이학습 예시1
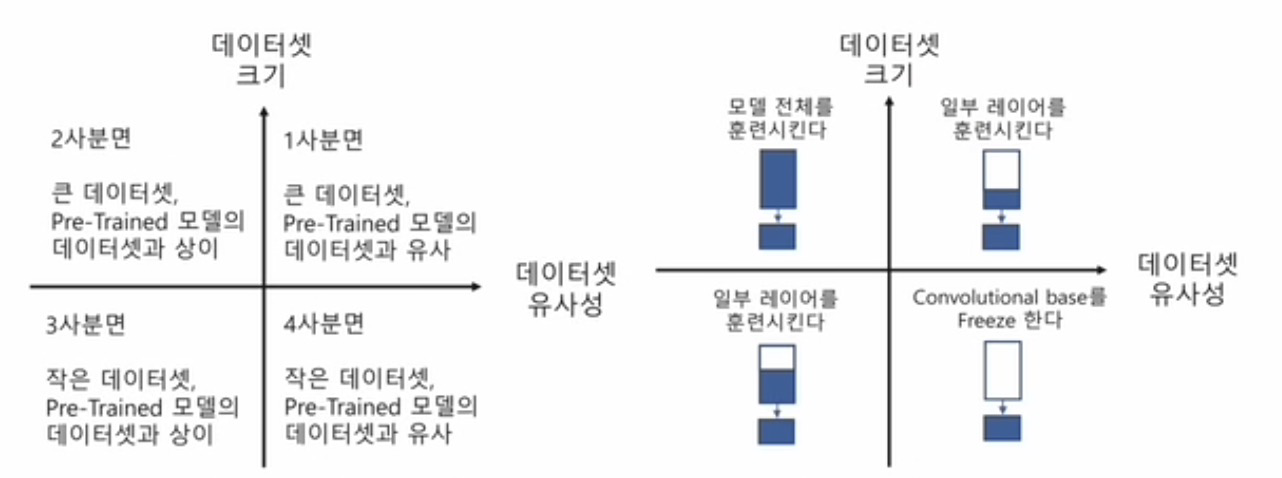
전이학습 예시2
- Imagenet → class를 주어 사물 분류
- Imagenet(class를 주어 사물 분류)에서 이미 학습을 완료한 구조화된 weight → 적용하려고 하는 모델로 가져와서 전이학습
- 1사분면: 출력단 훈련 / 2사분면: 구조만 가져와서 훈련 / 3,4사분면: 입력층에 가까운 데이터 훈련
1. 데이터 전처리
data_transforms = {
# Compose 전처리
'train': transforms.Compose([transforms.Resize([64, 64]),
# 랜덤 상하좌우로 반전 -> 이미지 증강 -> 과적합 방지 & 부족한 데이터 보충 / 좌우 순서가 중요한 경우는 사용x(ex.6, 9)
transforms.RandomHorizontalFlip(),
transforms.RandomVerticalFlip(),
# 이미지 자르기 52*52 정사이즈 여러 종류의 crop 존재 -> 일부를 보여주는 효과
transforms.RandomCrop(52), transforms.ToTensor(),
# rgb 색상 값이고 평균 값, 표준편차 값 -> normalize 색상 분포를 찾아 놓아야 함
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
'val': transforms.Compose([transforms.Resize([64, 64]),
transforms.RandomCrop(52), transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])
}
data_dir = './splitted'
image_datasets = {x: ImageFolder(root=os.path.join(data_dir, x),
transform=data_transforms[x]) for x in ['train', 'val']}
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x],
batch_size=BATCH_SIZE,
shuffle=True,
num_workers=4) for x in ['train', 'val']}
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'val']}
class_names = image_datasets['train'].classes2. weight 가져오기
from torchvision import models
from torch.optim import lr_scheduler
# 학습이 완료된 weight를 가져옴, 주의! 클래스는 맞지 않는다 출력단을 맞추기(원래 모델 33)
resnet = models.resnet50(pretrained=True)
num_fits = resnet.fc.in_features # in_features 마지막 layer 채널수
resnet.fc = nn.Linear(num_fits, 33)
resnet = resnet.to(DEVICE)
criterion = nn.CrossEntropyLoss()
# 마지막 교체 layer weight는 학습이 안됐으니 아래 옵션 필요
optimizer_ft = optim.Adam(filter(lambda p: p.requires_grad, resnet.parameters()), lr=0.001)
#epoch에 따라서 lr 변화 7epoch마다 0.1 하락
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
ct = 0
# 모델의 하위 layer가져오기
for child in resnet.children():
ct += 1
# 0 ~ 5 freeze 학습 x -> 입력에 가까운 layer 고정 / 6~9 학습하기
if ct < 6:
for param in child.parameters():
param.requires_grad = False3. 전이학습 best 모델 저장 함수
def train_resnet(model, criterion, optimizer, scheduler, num_epochs=25):
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print('----------------------------epoch {}------------------------------'.format(epoch+1))
since = time.time()
for phase in ['train', 'val']:
if phase == 'train':
model.train()
else:
model.eval()
# 초기화
running_loss = 0.0
running_corrects = 0
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(DEVICE)
labels = labels.to(DEVICE)
optimizer.zero_grad()
with torch.set_grad_enabled(phase=='train'):
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
if phase == 'train':
loss.backward()
optimizer.step()
running_loss += loss.item() * inputs.size(0) # inputs.size(0) 배치사이즈
running_corrects += torch.sum(preds==labels.data)
if phase == 'train':
scheduler.step()
epoch_loss = running_loss/dataset_sizes[phase]
epoch_acc = running_corrects.double()/dataset_sizes[phase]
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
time_elapsed = time.time() - since
print('Completed in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:.4f}'.format(best_acc))
model.load_state_dict(best_model_wts)
return model4. 전이학습
model_resnet50 = train_resnet(resnet, criterion, optimizer_ft, exp_lr_scheduler, num_epochs=EPOCH)
torch.save(model_resnet50, 'resnet50.pt')
# 전처리
transform_resNet = transforms.Compose([
transforms.Resize([64, 64]),
transforms.RandomCrop(52),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
# test loader
test_resNet = ImageFolder(root='./splitted/test', transform=transform_resNet)
test_loader_resNet = torch.utils.data.DataLoader(
test_resNet,
batch_size=BATCH_SIZE,
shuffle=True,
num_workers=4
)
# evaluate
resnet50 = torch.load('resnet50.pt')
resnet50.eval()
test_loss, test_accuracy = evaluate(resnet50, test_loader_resNet)
print('ResNet test acc: ', test_accuracy) #ResNet test acc: 98.9485542621104Reference
1) 제로베이스 데이터스쿨 강의자료
2) https://velog.io/@seokjin1013/PyTorch-numworkers%EC%97%90-%EA%B4%80%ED%95%98%EC%97%AC

데이터 사이언스 / just do it