Convolutional Neural Network (CNN)
🗝 Keyword
📑 Concept
CNN(Convolutional Neural Network, 합성곱 신경망)
- 다층 퍼셉트론 신경망(MLP)
- 모든 입력 값을
Flatten으로 펴준 뒤에 연산
-> 공간적 특성 살리지 X (공간 정보 소실)
- 모든 입력 값을
- CNN
- 이미지 데이터의 공간적 특성 보존
- 합성곱 층 - 이미지의 일부분을 훑으면서 연산 진행, 특징을 잡아내 학습
=> 층이 깊어지더라도 공간적 특성을 최대한 보존
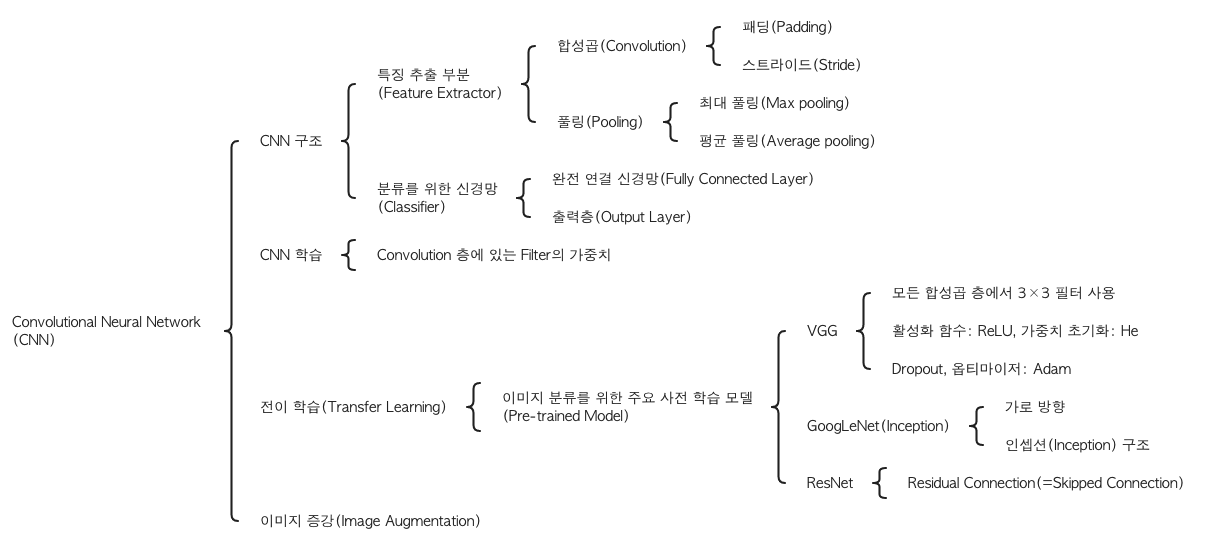
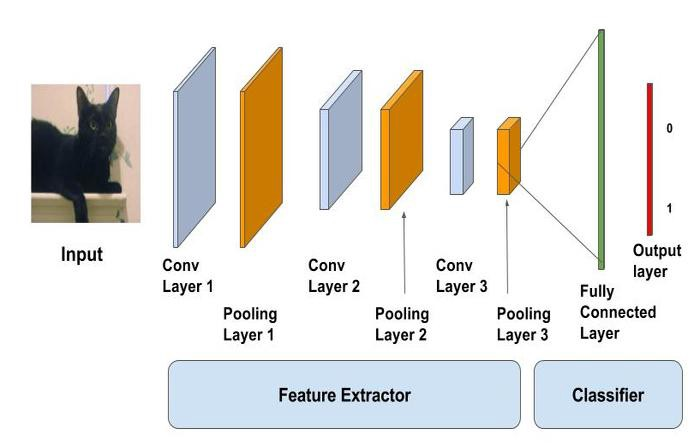
CNN의 구조
-
CNN 구조
- 특징 추출 부분(Feature Extractor)
합성곱 층(Convolution Layer)풀링 층(Pooling Layer)
- 분류를 위한 신경망(Classifier)
완전 연결 신경망(Fully Connected Layer)출력층(Output Layer)
- 특징 추출 부분(Feature Extractor)
특징 추출 부분(Feature Extractor)
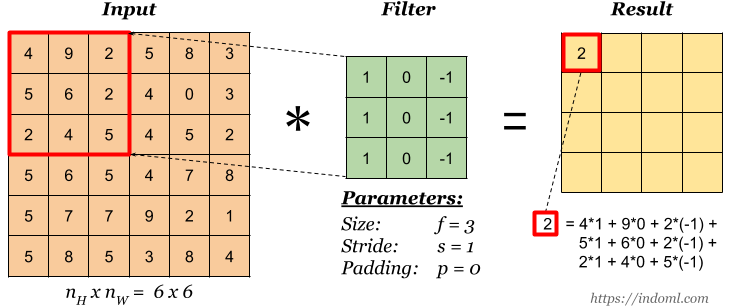
합성곱(Convolution)
-
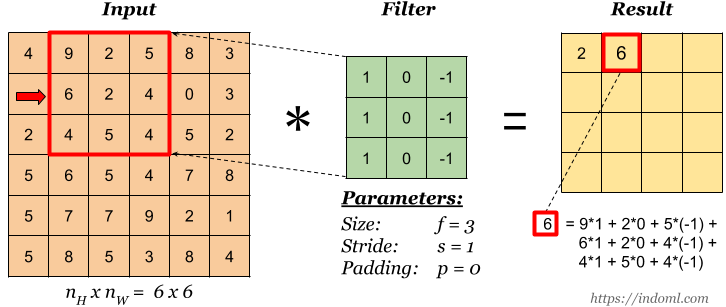
합성곱 필터(Convolution Filter)가 슬라이딩(Sliding)하며 이미지 부분부분의 특징을 읽어나감 -
필터가 왼쪽 위부터 오른쪽으로 슬라이딩하며 합성곱 진행 -
결과값:
Feature Map -
단점 -> output(=Feature Map)이 작아짐
필터(Filter)
-
이미지의 특징을 찾아내기 위한 공용 파라미터
-
Kernel이라고도 함 (Filter = Kernel) -
일반적으로 (3, 3)이나 (5, 5)과 같은 정사각 행렬로 정의
-
입력 데이터를 지정된 간격으로 순회하며 채널별로 합성곱을 하고 모든 채널(컬러의 경우 3개)의 합성곱의 합을
Feature Map으로 만듦
=> 지정된 간격으로 이동하면서 전체 입력데이터와 합성곱해Feature Map만듦
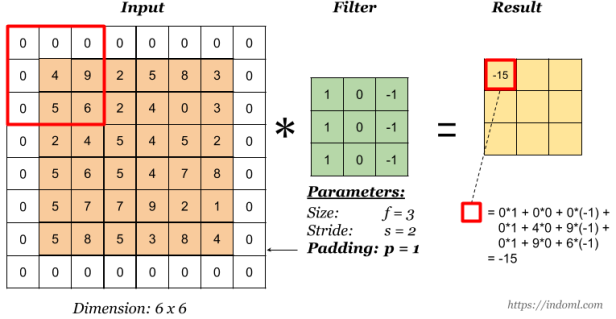
패딩(Padding)
-
외부를 특정한 값으로 둘러싸서 처리해주는 방식
-
Output(=
Feature map) 의 크기 조절, 실제 이미지 값을 충분히 활용하기 위해 사용 -
'0'으로 둘러싸주는
제로-패딩(Zero-Padding)이 가장 많이 사용됨 -
padding='valid': no padding (패딩 적용X) -
padding=’same': results in padding with zeros evenly to the left/right or up/down of the input.
입력의 왼쪽/오른쪽 또는 위/아래에 균일하게 0이 채워짐
(=> 인풋과 아웃풋이 동일한 길이를 갖도록 0으로 패딩) -
padding="same"andstrides=1-> output has the same size as the input.
tf.keras.layers.Conv2D | TensorFlow Core v2.8.0
스트라이드(Stride)
-
필터가 이동하는 보폭(=간격)을 결정
-> 슬라이딩(Sliding)시에 몇 칸 씩 건너뛸지 -
Stride=1
-> 필터 1칸씩 이동 -
Stride=2
-> 필터 2칸씩 이동
- Stride = 1
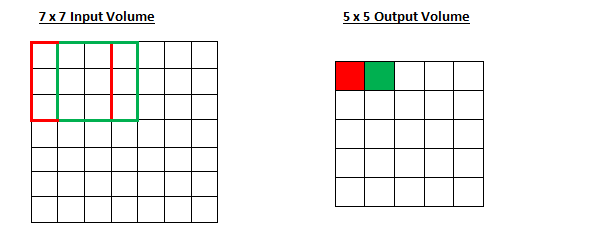
- Stride = 2
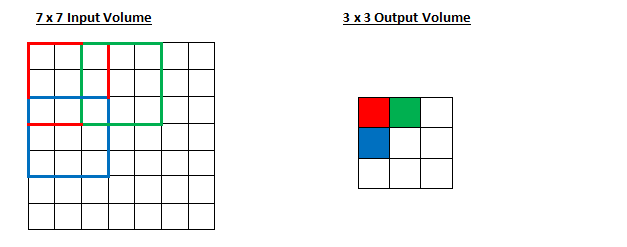
- => Stride가 커질수록 출력되는
Feature map의 크기는 작아짐
필터 크기(Filter size), 패딩(Padding), 스트라이드(Stride)에 따른 Feature map 크기 변화
: 입력되는 이미지의 크기(=피처 수)
: 출력되는 이미지의 크기(=피처 수)
: 합성곱에 사용되는 커널(=필터)의 크기
: 합성곱에 적용한 패딩 값
: 합성곱에 적용한 스트라이드 값
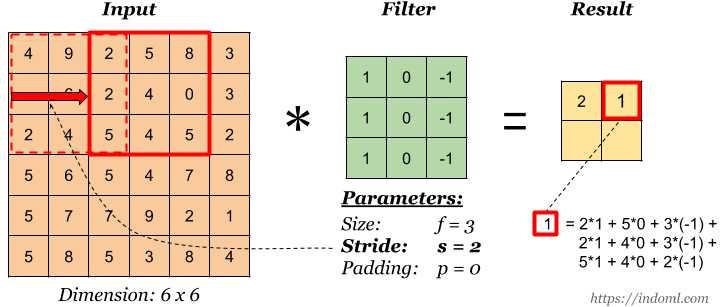
합성곱(Convolution) 계산 과정
Step 1)
Step 2) -> Stride = 1
Stride) -> Stride = 2
Padding)
(A)에서 학습될 가중치의 개수
model = Sequential()
model.add(Conv2D(3, (5, 5), activation='relu', input_shape=(100, 100, 3))) # ---- (A)
model.add(MaxPooling2D((2, 2)))
model.add(Flatten())
model.add(Dense(5, activation='softmax'))=> 225
- Convolution 층에서
filter가 가중치 - filer shape=(5,5) -> filter: 가중치 25개 (5x5)
- filter 3개 적용 & input이 RGB라서 채널이 3개
-> 25(filter 가중치) x 3(filter 3개) x 3(input 채널 3개)
= 225개
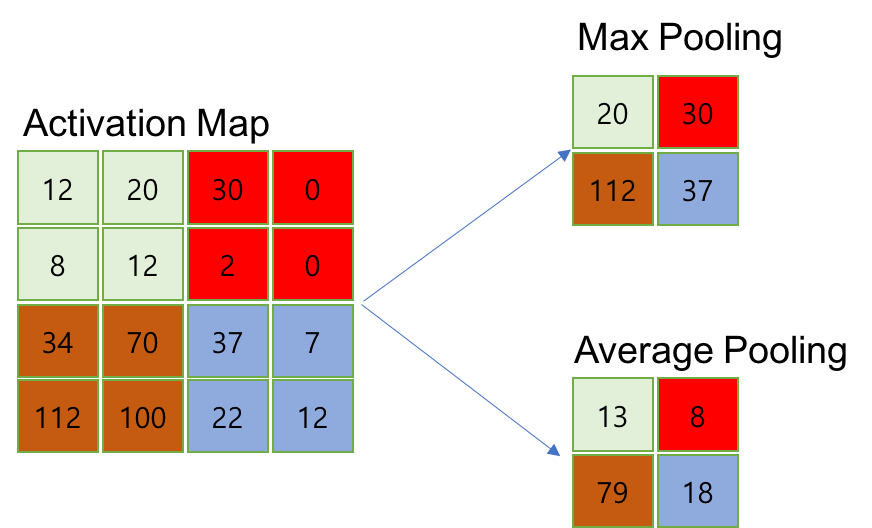
풀링(Pooling)
-
가로, 세로 방향의 공간을 줄이기 위해 사용
-
풀링 층은 학습해야 할 가중치가 없어 채널 수가 변하지 않음
-
최대 풀링(Max pooling)- 정해진 범위 내에서 최대값 추출
-
평균 풀링(Average pooling)- 정해진 범위 내에 있는 모든 요소의 평균 추출
-
주로 풀링 사이즈랑 같은 값의
Stride사용- ex) 풀링: 2 * 2 ->
Stride=2 - ex) 풀링: 3 * 3 ->
Stride=3
- ex) 풀링: 2 * 2 ->
분류를 위한 신경망(Classifier)
완전 연결 신경망(Fully Connected Layer)
-
합성곱 층(Convolutional Layer),풀링 층(Pooling Layer)에서 충분히 특징 추출 ->완전 연결 신경망(Fully Connected Layer)구축 -
다층 퍼셉트론 신경망으로 구성 -
풀어야 하는 문제에 따라 출력층을 잘 설계해주는 것이 중요
CNN의 학습
- Convolution 층에 있는
Filter의 가중치를 학습

- Convolution 층과 Pooling 층을 거치면서 이미지가 작아지고 Convolution 층의
Filter는 더 큰 특징을 포착- 낮은 층에서는 가로, 세로 등의 특징 학습
- 층이 깊어지면서 물체의 일부 포착
- 층이 더욱 깊어지게 되면 물체 전체의 윤곽에 해당하는 특징 학습
전이 학습(Transfer Learning)
"거인의 어깨에 올라서서 더 넓은 세상을 바라보라"
-> 이미 잘 정립된 지식을 바탕으로 하여 더 높은 곳에 이를 수 있었다
- 사전 학습 모델(Pre-trained Model)
- 대량의 데이터로 학습한 모델
- 이미지 분류에서 사용되는 주요 사전 학습 모델
- VGG
- GoogLeNet(Inception)
- ResNet
- 전이 학습(Transfer Learning)
- 대량의 데이터를 학습한
사전 학습 모델(Pre-trained Model)의 가중치를 그대로 가져와
분류기(=완전 연결 신경망)부분만 설계해서 사용 - 사전 학습 가중치는 학습되지 않도록 고정(freeze) -> 학습 빠름, 더 좋은 결과
- 사전 학습 가중치: 여러 데이터의 일반적인 특징을 많이 학습해서 어떠한 데이터를 넣더라도 준수한 성능을 보임
- 대량의 데이터를 학습한
_%20Photo.jpeg)