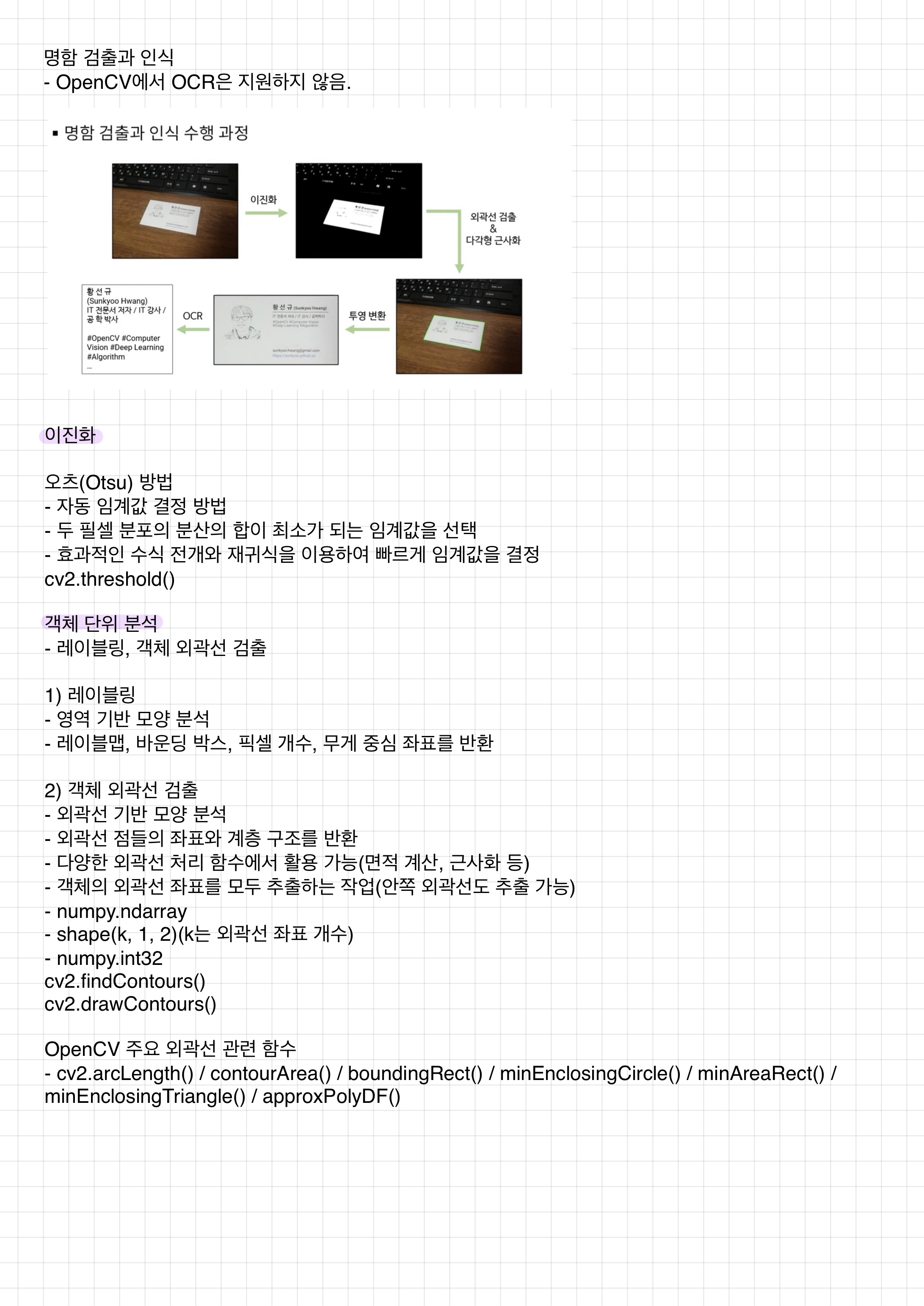
명함 검출과 인식
src = cv2.imread('/Users/nayoung/Documents/ds_study/data/namecard1.jpg')
if src is None:
print('Image load failed!')
sys.exit()
# 그레이스케일로 변환
src_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 자동 이진화
th, src_bin = cv2.threshold(src_gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)
# 외곽선 검출
contours, _ = cv2.findContours(src_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
'''
# 이진 영상을 컬러 영상 형식으로 변환
dst = cv2.cvtColor(src_bin, cv2.COLOR_GRAY2BGR)
# 검출된 외곽선 모두 그리기
for i in range(len(contours)):
c = (random.randint(0,255), random.randint(0,255), random.randint(0,255))
cv2.drawContours(dst, contours, i, c, 2) # 2: 픽셀 두께
cv2.imshow('src', src)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()
'''
for pts in contours:
# 너무 작은 객체는 무시
if cv2.contourArea(pts) < 1000:
continue
# 외곽선 근사화
approx = cv2.approxPolyDP(pts, cv2.arcLength(pts, True)*0.02, True)
# 사각형으로 근사화되면 외곽선 표시
if len(approx) == 4:
cv2.polylines(src, [approx], True, (0,255,0), 2, cv2.LINE_AA)
cv2.imshow('src', src)
cv2.waitKey()
cv2.destroyAllWindows()명함 똑바로 피기1
src = cv2.imread('/Users/nayoung/Documents/ds_study/data/namecard1.jpg')
w, h = 720, 400
srcQuad = np.array([[324,308], [760,369], [718,611], [231,517]], np.float32)
dstQuad = np.array([[0,0], [w-1,0], [w-1,h-1], [0,h-1]], np.float32)
dst = np.zeros((h,w), np.uint8)
pers = cv2.getPerspectiveTransform(srcQuad, dstQuad)
dst = cv2.warpPerspective(src, pers, (w,h))
cv2.imshow('src', src)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()명함 똑바로 피기2
def reorderPts(pts):
idx = np.lexsort((pts[:,1], pts[:,0]))
pts = pts[idx]
if pts[0,1] > pts[1,1]:
pts[[0,1]] = pts[[1,0]]
if pts[2,1] < pts[3,1]:
pts[[2,3]] = pts[[3,2]]
return pts
src = cv2.imread('/Users/nayoung/Documents/ds_study/data/namecard1.jpg')
# 출력 영상 설정
w, h = 720, 400
srcQuad = np.array([[0,0], [0,h], [w,h], [w,0]], np.float32)
dstQuad = np.array([[0,0], [0,h], [w,h], [w,0]], np.float32)
dst = np.zeros((h,w), np.uint8)
# 입력 영상을 그레이스케일로 변환
src_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 자동 이진화
_, src_bin = cv2.threshold(src_gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)
# 외곽선 검출 및 명함 검출
contours, _ = cv2.findContours(src_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for pts in contours:
# 너무 작은 객체는 무시
if cv2.contourArea(pts) < 1000:
continue
# 외곽선 근사화
approx = cv2.approxPolyDP(pts, cv2.arcLength(pts, True)*0.02, True)
# 사각형으로 근사화되면 외곽선 표시
if len(approx) == 4:
# cv2.polylines(src, [approx], True, (0,255,0), 2, cv2.LINE_AA)
corners = approx.reshape(4,2).astype(np.float32)
srcQuad = reorderPts(corners)
pers = cv2.getPerspectiveTransform(srcQuad, dstQuad)
dst = cv2.warpPerspective(src, pers, (w,h))
cv2.imshow('src', src)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()얼굴 검출과 응용
얼굴 검출
import sys
import numpy as np
import cv2
model = '/Users/nayoung/Documents/ds_study/data/res10_300x300_ssd_iter_140000_fp16.caffemodel'
config = '/Users/nayoung/Documents/ds_study/data/deploy.prototxt.txt'
#model = 'opencv_face_detector/opencv_face_detector_uint8.pb'
#config = 'opencv_face_detector/opencv_face_detector.pbtxt'
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print('Camera open failed!')
sys.exit()
net = cv2.dnn.readNet(model, config)
if net.empty():
print('Net open failed!')
sys.exit()
while True:
ret, frame = cap.read()
if not ret:
break
blob = cv2.dnn.blobFromImage(frame, 1, (300, 300), (104, 177, 123))
net.setInput(blob)
out = net.forward()
detect = out[0, 0, :, :]
(h, w) = frame.shape[:2]
for i in range(detect.shape[0]):
confidence = detect[i, 2]
if confidence < 0.5:
break
x1 = int(detect[i, 3] * w)
y1 = int(detect[i, 4] * h)
x2 = int(detect[i, 5] * w)
y2 = int(detect[i, 6] * h)
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0))
label = f'Face: {confidence:4.2f}'
cv2.putText(frame, label, (x1, y1 - 1), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 255, 0), 1, cv2.LINE_AA)
cv2.imshow('frame', frame)
if cv2.waitKey(1) == 27:
break
cap.release()
cv2.destroyAllWindows()모자이크
import sys
import numpy as np
import cv2
model = '/Users/nayoung/Documents/ds_study/data/res10_300x300_ssd_iter_140000_fp16.caffemodel'
config = '/Users/nayoung/Documents/ds_study/data/deploy.prototxt.txt'
#model = 'opencv_face_detector/opencv_face_detector_uint8.pb'
#config = 'opencv_face_detector/opencv_face_detector.pbtxt'
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print('Camera open failed!')
sys.exit()
net = cv2.dnn.readNet(model, config)
if net.empty():
print('Net open failed!')
sys.exit()
while True:
ret, frame = cap.read()
if not ret:
break
blob = cv2.dnn.blobFromImage(frame, 1, (300, 300), (104, 177, 123))
net.setInput(blob)
out = net.forward()
detect = out[0, 0, :, :]
(h, w) = frame.shape[:2]
for i in range(detect.shape[0]):
confidence = detect[i, 2]
if confidence < 0.5:
break
x1 = int(detect[i, 3] * w)
y1 = int(detect[i, 4] * h)
x2 = int(detect[i, 5] * w)
y2 = int(detect[i, 6] * h)
#cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
face_img = frame[y1:y2, x1:x2]
fh, fw = face_img.shape[:2]
face_img2 = cv2.resize(face_img, (0, 0), fx=1./16, fy=1./16)
cv2.resize(face_img2, (fw, fh), dst=face_img, interpolation=cv2.INTER_NEAREST)
#frame[y1:y2, x1:x2] = cv2.resize(face_img2, (fw, fh), interpolation=cv2.INTER_NEAREST)
cv2.imshow('frame', frame)
if cv2.waitKey(1) == 27:
break
cap.release()
cv2.destroyAllWindows()
21세기 주인공