커널 빌드
$ mkdir kernel
$ cd kernel- 커널 다운로드
$ wget https://cdn.kernel.org/pub/linux/kernel/v6.x/linux-6.6.11.tar.xz
$ tar xvf linux-6.6.11.tar.xz
$ cd linux-6.6.11- 커널 defconfig
- 이전글의 크로스빌드 설정이 되어 있어야한다.
export PATH=$PATH:$HOME/x-tools/arm-hello-linux-uclibcgnueabihf/bin$ arm-linux- <-- 여기서 탭치면 arm-linux-addr2line arm-linux-gcc arm-linux-gcov ... 생략 툴체인 바로 실행할 수 있는 환경이어야한다.
- 이전글의 크로스빌드 설정이 되어 있어야한다.
$ make ARCH=arm CROSS_COMPILE=arm-linux- vexpress_defconfig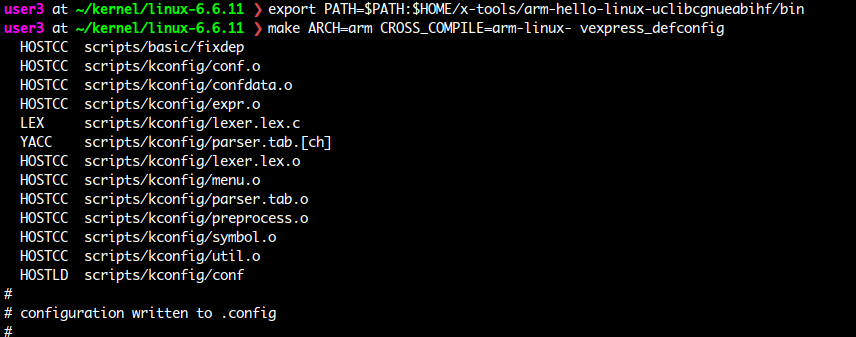
arch/arm/configs/에 있는vexpress_defconfig가 기본적인.config를 생성한다.

- 커널 빌드
$ make ARCH=arm CROSS_COMPILE=arm-linux-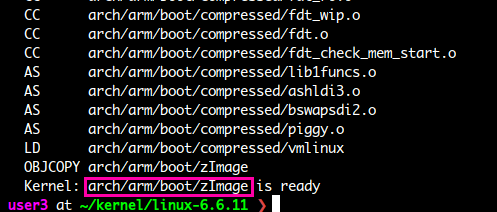
- dtb
arch/arm/boot/dts/arm에vexpress-v2p-ca9.dtb가 존재한다.

qemu 탑재
$ qemu-system-arm -M vexpress-a9 -kernel arch/arm/boot/zImage -dtb arch/arm/boot/dts/arm/vexpress-v2p-ca9.dtb -nographic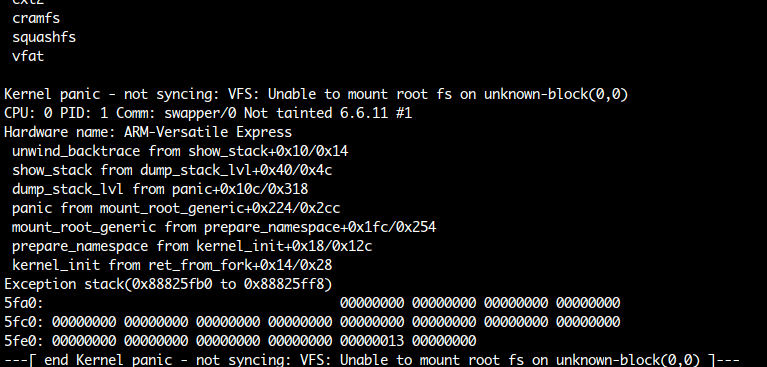

rootfs가 없기 때문에 실패한다.
initramfs
$ mkdir initramfs
$ cd initramfsinit.c
#include <stdio.h>
int main(){
printf("hello world\n");
while(1);
return 0;
}
- 이전글의 크로스빌드 설정이 되어 있어야한다.
export PATH=$PATH:$HOME/x-tools/arm-hello-linux-uclibcgnueabihf/bin$ arm-linux- <-- 여기서 탭치면 arm-linux-addr2line arm-linux-gcc arm-linux-gcov ... 생략 툴체인 바로 실행할 수 있는 환경이어야한다. - 컴파일
$ arm-linux-gcc --static init.c -o init$ file init
cpio
$ echo init|cpio -o --format=newc > initramfs

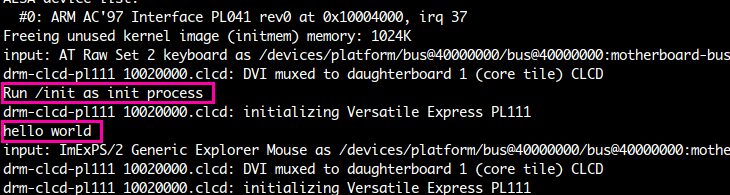
qemu탑재
$ qemu-system-arm -M vexpress-a9 -kernel <kernel> \
-dtb <dtb> \
-append "console=ttyAMA0,115200" -nographic \
-initrd <initramfs>-append: 커널 커맨드 추가


pllpokko@alumni.kaist.ac.kr