
3장에서 다루는 주제
- Job과 그 사용사례
- Job과 Deferred의 라이프 사이클
- Deferred의 사용사례
- Job의 각 상태별 예상되는 사항
- Job의 현재 상태를 산출하는 방법
- 예외 처리 방법
잡과 디퍼드
비동기 함수를 두 그룹으로 나눠볼 수 있음
-
결과가 없는 비동기 함수:
일반적인 시나리오로는 로그에 기록하고 분석 데이터를 전송하는 것과 같은 백그라운드 작업을 들 수 있음 완료 여부를 모니터링할 수 있지만 결과를 갖지 않는 백그라운드 작업이 이런 유형에 속함 -
결과를 반환하는 비동기 함수:
예를 들어 비동기 함수가 웹 서비스에서 정보를 가져올 때 거의 대부분 해당 함수를 사용해 정보를 반환하고자 할 것
두 가지중 어떤 경우이건 해당 작업에 접근하고 예외가 발생하면 그에 대응하거나, 해당 작업이 더 이상 필요하지 않을 때 취소함
잡(Job)
- 잡은 파이어-앤-포겟 작업
-> 한 번 시작된 작업은 예외가 발생하지 않는 한 대기하지 ❌ - 코루틴 빌더인 launch()를 사용해 Job을 생성하는 방법이 가장 일반적
fun main(args:Array<String>) = runBlocking { val job = GlobalScope.launch { // Do background task here } } 다음과 같이 Job() 팩토리 함수를 사용할 수도 있다. fun main(args:Array<String>) = runBlocking { val job = Job() }
⚡
Job은 인터페이스로, launch()와 Job()은 모두 JobSupport의 구현체를 반환한다.
앞으로 보게 될 텐데 JobSupport는 잡을 확장한 인터페이스인 Job.Deferred의 여러 구현체의 기반이다.
예외 처리
- 기본적으로 잡 내부에서 발생하는 예외는 잡을 생성한 곳까지 전파
- Job이 완료되기를 기다리지 않아도 발생
fun main(args:Array<String>) = runBlocking { val job = GlobalScope.launch { TODO("Not Implemented") } delay(500) /*delay()를 사용해 충분한 시간 동안 앱을 실행하게 해서 예외가 발생하게 했다. 잡이 완료 될 때까지 대기하지 않더라도 예외가 전파된다는 것을 보여주기 위해 의도적으로 join()을 사용하지 않았다. */ }
↪ 현재 스레드의 포착되지 않은 예외 처리기에 예외가 전파
라이프 사이클
⚡
기본적으로 Job은 생성되는 즉시 시작된다.
이것은 Job이 launch()로 생성되거나 Job()으로 생성될 때 발생한다.
Job을 생성할 때 시작하지 않게 하는 것도 가능하다.
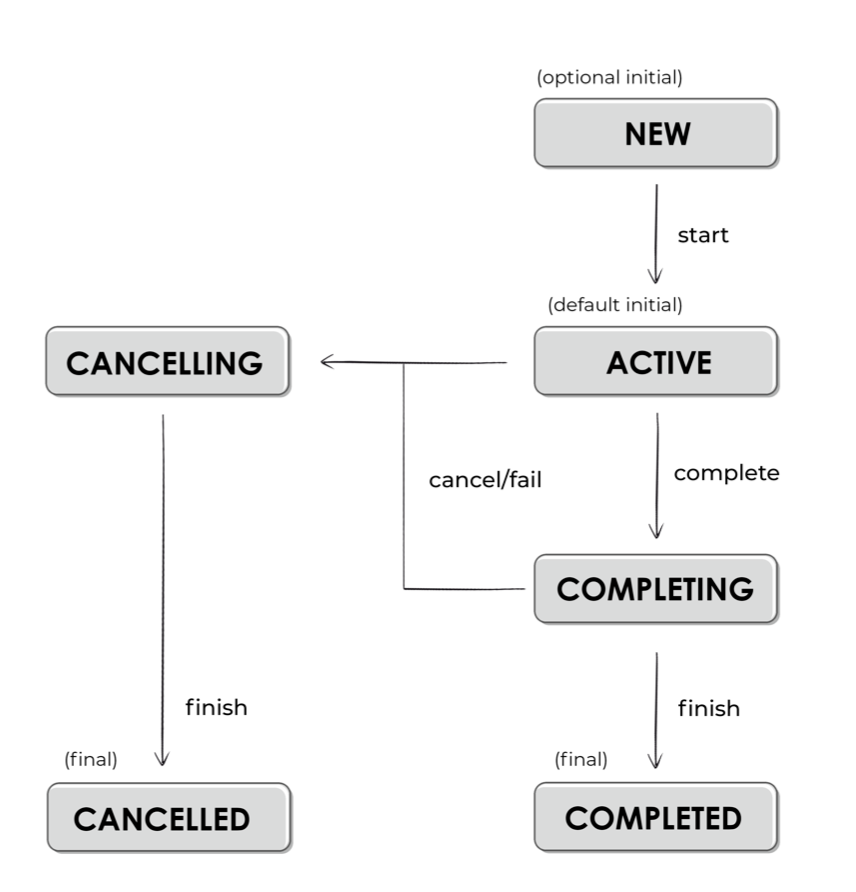
다이어그램의 다섯 가지 상태에 대해
- New(생성): 존재하지만 아직 실행되지 않는 잡
- Active(활성): 실행 중인 잡. 일시 중단된 잡도 활성으로 간주
- Completed(완료됨): 잡이 더 이상 실행되지 않는 경우
- Canceling(취소 중): 실행 중인 잡에서 cancel()이 호출되면 취소가 완료될 때까지 시간이 걸리기도 함. 이것은 활성과 취소의 중간 상태
- Cancelled(취소 됨): 취소로 인해 실행이 완료된 잡. 취소된 잡도 완료로 간주될 수 있음
생성
- 잡은 기본적으로 launch()나 Job()을 사용해 생성될 때 자동으로 생성됨
- 잡을 생성할 때 자동으로 시작되지 않게 하려면 CoroutineStart.LAZY를 사용
fun main(args:Array<String>) = runBlocking { GlobalScope.launch(start = CoroutineStart.LAZY) { TODO("Not implemented yet!") } delay(500) }
↪ 코드를 실행하면 오류가 출력되지 ❌
작업은 생성됐지만 시작된 적이 없으므로 예외가 발생 ❌
활성
- 생성상태에 있는 잡은 다양한 방법으로 시작할 수 있지만 일반적으로 start() 나 join() 을 호출해서 실행
-> 둘의 차이점:
start(): 잡이 완료될 때까지 기다리지 않고 잡을 시작
join(): 잡이 완료될 때까지 실행을 일시 중단
start() 예시
fun main(args:Array<String>) { val job = GlobalScope.launch(start = CoroutineStart.LAZY) { delay(3000) } job.start() }
↪ job.start()가 호출될 때 실행을 일시 중단하지 않으므로 앱이 job이 완료되는 것을 기다리지 않고 실행을 끝냄
⚡
start()는 실행을 일시 중단하지 않으므로 일시 중단 함수나 코루틴에서 호출할 필요가 없다. 앱의 어느 부분에서도 호출할 수 있다.
join() 예시
fun main(args:Array<String>) { val job = GlobalScope.launch(start = CoroutineStart.LAZY) { delay(3000) } job.join() }
↪ join()을 사용하면 앱이 job을 완료할 때까지 대기
⚡중요⚡
join()은 실행을 일시 중단할 수 있으므로 코루틴 또는 일시 중단 함수에서 호출해야 한다. 이를 위해 runBlocking()이 사용되고 있음에 유의
- 시작된 모든 잡은 활성 상태이며 실행이 완료되거나 취소가 요청될 때까지 활성 상태
취소 중
- 취소 요청을 받은 활성 잡은 취소 중이라고 하는 스테이징 상태로 들어갈 수 있음
- 잡에 실행을 취소하도록 요청하려면 cancel() 함수를 호출
cancel() 예시
fun main(args:Array<String>) { val job = GlobalScope.launch { // Do Some work here delay(5000) } delay(2000) job.cancel() }
↪ 잡 실행은 2초 후에 취소
- cancel()에는 선택적 매개변수인 cause가 있음
- 예외가 취소의 원인일 때는 원인을 같이 제공해 주면 나중에 찾아볼 수 있음
fun main(args:Array<String>) { val job = GlobalScope.launch { // Do Some work here delay(5000) } delay(2000) // cancel with a cause job.cancel(cause = Exception("Timeout!") // kotlinx.coroutines 1.0.0-RC1 에서 // job.cancel(cause)는 deprecated 됐다. }
- cancelAndJoin() 함수도 존재
-> 실행을 취소할 뿐 아니라 취소가 완료될 때까지 현재 코루틴을 일시 중단
취소됨
- 취소 또는 처리되지 않은 예외로 인해 실행이 종료된 잡은 취소됨으로 간주
- 잡이 취소되면, getCancellationException() 함수를 통해 취소에 대한 정보를 얻을 수 있음
-> CancellationException을 반환
fun main(args:Array<String>) { val job = GlobalScope.launch { // Do Some work here delay(5000) } delay(2000) // cancel job.cancel(cause = CancellationException("Tired of waiting")) val cancellation = job.getCancelltaionException() println(cancellation.message) }
↪ 취소된 잡과 예외로 인해 실패한 잡을 구별하기 위해 다음과 같이
CoroutineExceptionHandler를 설정해 취소 작업을 처리하는 것이 좋음👍
fun main(args:Array<String>) = runBlockin { val exceptionHandler = CoroutineExceptionHandler { _: CoroutineContext, throwble: Throwble -> println("Job cancelled due to ${throwable.message}") } GlobalScope.launch(exceptionHandler) { TODO("Not implemented yet!") } delay(2000) } 다음과 같이 invokeOnCompletion()을 사용할 수도 있다. fun main(args:Array<String>) = runBlockin { GlobalScope.launch { TODO("Not implemented yet!") }.invodeOnCompletion { cause -> cause?.let { println("Job cancelled due to ${it.message}") } } delay(2000) }
완료됨
- 실행이 중지된 잡은 완료됨으로 간주
- 실행이 정상적으로 종료됐거나 취소됐는지 또는 예외 때문에 종료됐는지 여부에 관계없이 적용
-> 이러한 이유로 취소된 항목은 완료된 항목의 하위 항목으로 간주
잡의 현재 상태
- 잡에는 상태가 많아서 외부에서 현재 상태를 파악하는 방법이 필요
잡은 세 가지 속성을 가짐
-
isAcitive: 잡이 활성 상태인지 여부. 잡이 일시 중지인 경우 true 반환
-
isCompleted: 잡이 실행을 완료했는지 여부
-
isCancelled: 잡 취소 여부. 취소가 요청되면 즉시 true 반환
| 상태(State) | isActive | isCompleted | isCancelled |
|---|---|---|---|
| 생성됨(Created) | false | false | false |
| 활성(Active) | true | false | false |
| 취소 중(Cancelling) | false | false | true |
| 취소됨(Cancelled) | false | true | true |
| 완료됨(Completed) | false | true | false |
잡을 설명하는 문서에는 완료중(completing)이라고 하는 내부 상태가 있다.
이 상태는 내부 상태이며, 시그니처는 활성 상태와 유사하다는 점을 고려할 때 개별 상태로는 다루지 않는다.
디퍼드
-
디퍼드(Deferred, 지연)는 결과를 갖는 비동기 작업을 수행하기 위해 잡을 확장
-
기본적인 컨셉은 연산이 객체를 반환, 객체는 비동기 작업이 완료될 때까지 비어 있다는 것
-
디퍼드와 그 상태의 라이프 사이클은 잡과 비슷
디퍼드를 만들려면 async를 사용할 수 있음
fun main(args:Array<String>) = runBlockin { val headlinesTask = GlobalScope.async { getHeadlines() } headlinesTask.await() } 또는 CompletableDeferred의 생성자를 사용할 수 있다. val articlesTask = CompletableDeferred<List<Article>>()
예외 처리
- 순수한 잡과 달리 디퍼드는 처리되지 않은 예외를 자동으로 전파하지 ❌
-> 디퍼드의 결과를 대기할 것으로 예상하기 때문에 이런 방식을 사용
-> 실행이 성공했는지 확인하는 것은 사용자의 몫
fun main(args:Array<String>) = runBlockin { val deferred = GlobalScope.async { TODO("Not implemented yet!") } // Wait for it to fail delay(2000) } 앞의 예제는 지연된 실패를 갖지만 예외를 전파 X 예외를 쉽게 전파할 수 있는 방법 fun main(args:Array<String>) = runBlockin { val deferred = GlobalScope.async { TODO("Not implemented yet!") } // Let it fail deferred.await() } // 앞의 코드와 다르게 이 코드는 예외를 전파하고 앱을 중단시킬 것이다.
디퍼드의 실행이 코드 흐름의 필수적인 부분임을 나타내는 것이기 때문에
await()을 호출하는 방식으로 설계
try-catch 블록을 사용해 예외를 처리
fun main(args:Array<String>) = runBlockin { val deferred = GlobalScope.async { TODO("Not implemented yet!") } try { deferred.await() } catch (throwable: Throwable) { println("Deferred cancelled due to ${throwable.message}") } }
이 장의 나머지 부분에서는 잡과 디퍼드를 모두 잡으로 표기
잡이 베이스 인터페이스이기 때문에 별도로 명시하지 않는 이상 모두 디퍼드에도 적용된다.
상태는 한 방향으로만 이동
- 잡이 특정 상태에 도달하면 이전 상태로 되돌아가지 않는다.
fun main(args: Array<String>) = runBlocking { val time = measureTimeMillis { val job = GlobalScope.launch { delay(2000) } // Wait for it to complete once job.join() // Restart the Job job.start() job.join() } println("Took $time ms") }
↪ 코드는 2초 동안 실행을 일시 중단하는 잡을 만듦
처음 호출한 job.join()이 완료되면 잡을 다시 시작하기 위해 start() 함수가 호출되고, 두 번째 join() 을 호출해서 두 번째 실행이 끝날 때까지 대기
전체 실행 시간을 측정하고 time 변수에 저장한다.
총 실행에는 약 2초가 걸렸으므로 잡이 한 번만 실행됐음을 보여줌
완료된 잡에서 start()를 호출해 다시 시작했다면 총 실행 시간은 약 4초가 될 것
이전에 기술한
일단 잡이 특정 상태에 도달하면 이전 상태로 되돌아 가지 않는다.과 일치한다.
잡은 완료됨(Completed) 상태에 도달했으므로 start()를 호출해도 아무런 변화가 없다.
최종 상태의 주의 사항
- 일부 잡의 상태는 최종 상태로 간주
-> 최종 상태는 잡을 옮길 수 없는 상태
-> 잡이 이전 상태로 되돌아가지 않을 것이라는 점을 고려하면 해당 상태는 취소됨(Cancelled)과 완료됨(Completed) 임
⭐정리
모니터링할 때 잡의 다양한 상태와 현재의 상태를 산출하는 방법을 아는 것이 중요
-
잡(Job) 은 아무것도 반환하지 않는 백그라운드 작업에 사용
-
디퍼드(Deferred) 는 백그라운드 작업이 수신하려는 것을 반활할 때 사용
-
잡은 다양한 상태값을 갖음
-> 생성, 활성, 취소 중, 취소됨 및 완료됨 -
잡의 현재 상태를 파악하기 위해 isActive, isCancelled 및 is Completed 속성 사용
-
디퍼드는 잡을 확장해 무언가를 반환할 가능성을 높임
-
디퍼드가 가질 수 있는 상태는 잡의 상태와 같음
-
잡의 상태는 앞으로만 이동할 수 있음. 이전 상태로 되돌릴 수 없음❌❌
-
최종 상태는 잡이 이동할 수 없는 상태 중 하나
-
잡의 최종 상태는 취소됨 및 완료됨
-
Join() 을 사용해 디퍼드가 대기된 경우, 예외가 전파되지 않도록 값을 읽기 전에 취소됐는지 여부를 확인해야 함
-
항상 잡에 예외를 기록하거나 표시하자🔥
