4. Feature detectors & descriptors
Designing feature descriptors
Photometric transformations
→ 위치는 동일 but 색깔이 바뀜
→ brightness / contrast
Geometric transformations
→ size, location, rotation 바뀜
Image patch
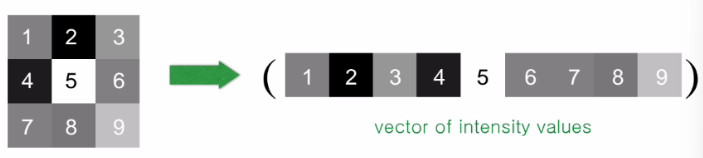
각 patch의 픽셀값만 사용
→ photometric & geometric 변화가 없다면 괜찮다
Tiny image
다운샘플링 → 아주 작은 변화는 쉽게 거를 수 있음 / 큰 변화도 차이 줄어듦
geometic 바꾸면 적용 불가능
histogram

scale & rotation에 대처가 쉬움
Orientation normalization
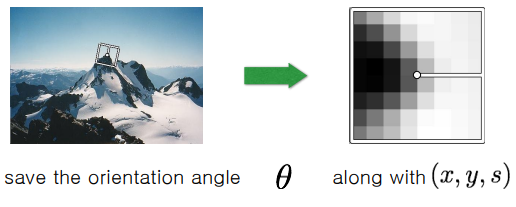
: location
: scale
direction 알면, patch를 rotate해서 대응 가능
noise에 민감할 수 있음
MOPS descriptor
-
given a feature
-
get 40x40 image patch, subsample every 5th pixel
→ blur & downsampling: 작은 변화에 덜 민감해지도록
→ low frequency filtering, absorbs localization errors -
subtract mean, divide by standard deviation
→ photometric 변형에 덜 민감해지도록 (색깔 변화)
→ removes bias(brightness) & gain(contrast) -
Haar Wavelet Transform
→ 간결하게 표현 추출 + 조명 변화 & 다른 변화에 덜 민감해지도록
→ low frequency projection
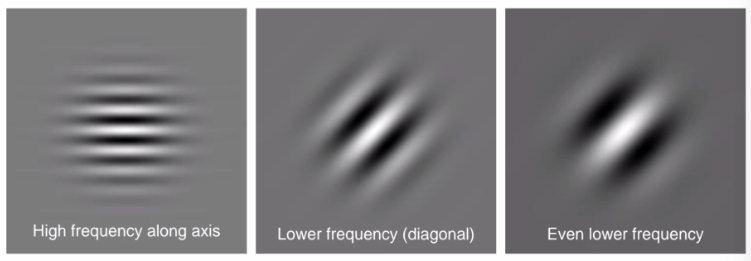
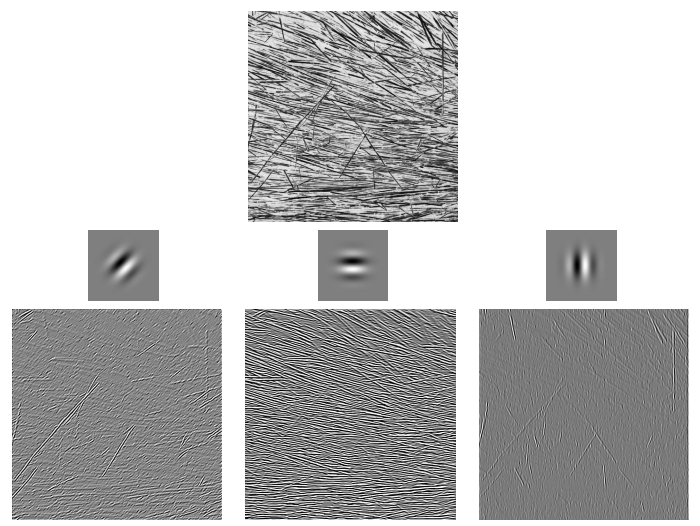
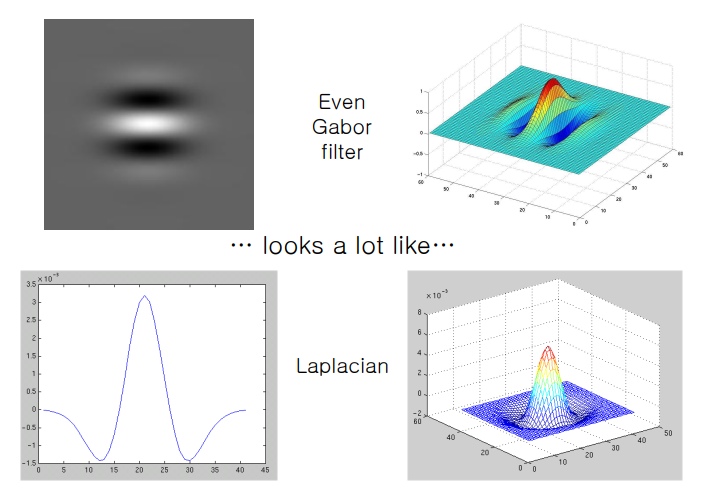
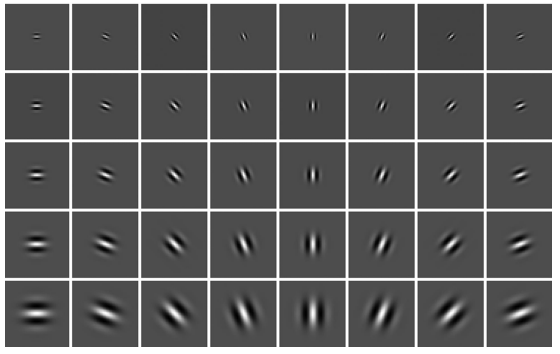
GIST descriptor
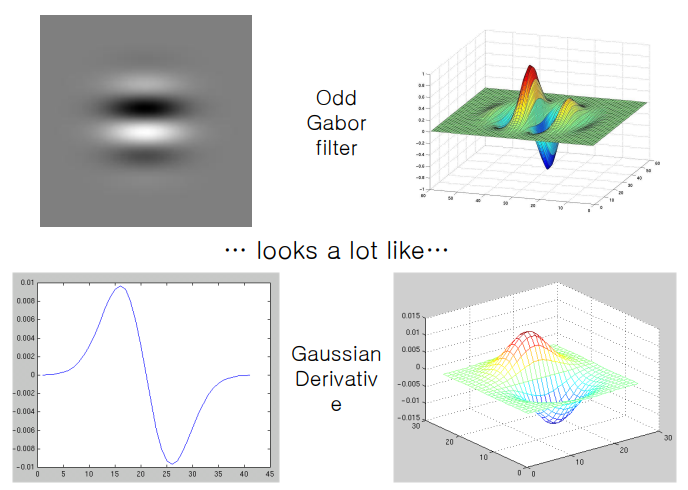
- compute filter responses (filter bank of Gabor filters)
- divide image patch into 4x4 cells
- compute filter response averages for cell
- size of descriptor is 4x4xN, where N is the size of the filter bank
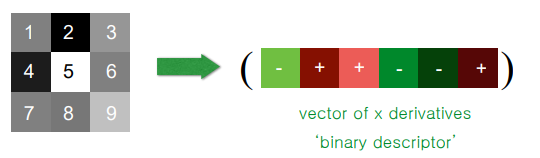
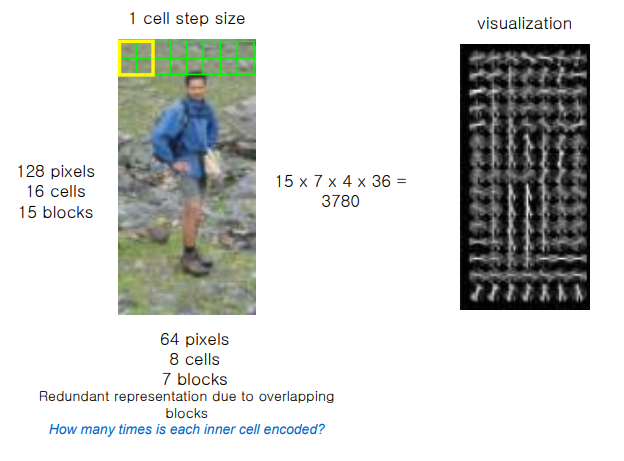
HOG descriptor
histogram of 'unsigned' gradients
(아까는 색깔 histogram)
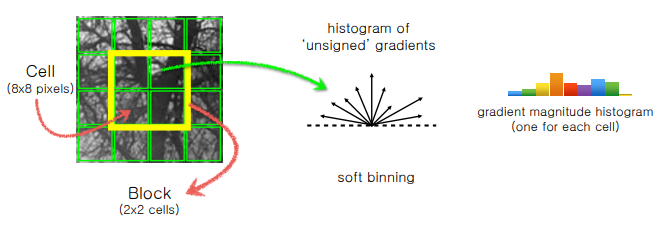
2 x 2 x 8
- 2x2: block scale
- 8: 방향의 개수
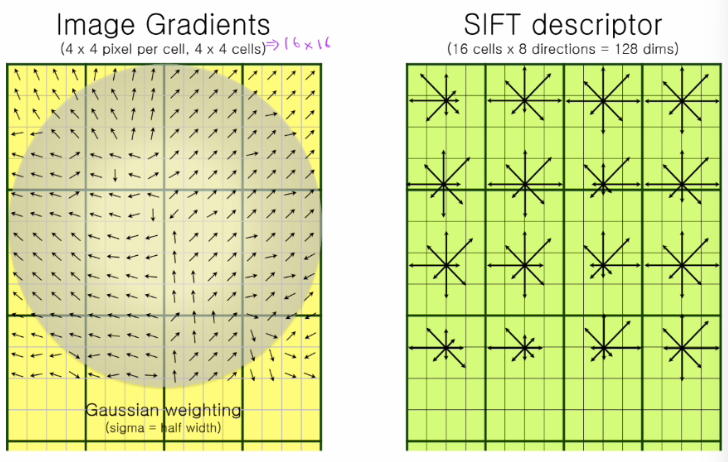
SIFT
- multi-scale extrema detection
- keypoint localization
- orientation assignment
- keypoint descriptor ()
1. multi-scale extrema detection
Gaussian & DoG (Difference of Gaussian)
2. keypoint localization
3. orientation assignment
4. keypoint descriptor