[OS 공룡책] Ch06. Synchronization Tools
Operating System

Chapter 6: Synchronization Tools
Background
thread
- Consistency 보장 X
- 공유 변수를 동시에 접근할 경우
- 일관성 : 코딩할 때 답이 하나. 순서 보장
- Synchronization
- OS, H/W가 Consistency 보장 지원
- 잘못하면 deadlock, livelock 발생 (→ 8장)
Race Condition
- Race Condition
- 불확실한 상태
- 여러 프로세스들 동시 접근 → 순서 보장 X
- Counter
- 1씩 증가
- counter == BUFFER_SIZE : 버퍼 꽉 참 → busy waiting
- Producer
-
counter < BUFFER_SIZE 일 때 write
while (True) { while (counter == BUFFER_SIZE) ; //do nothing buffer[in] = nextProduced; in = (in + 1) % BUFFER_SIZE; counter++; }
-
- Consumer
-
counter > 0 일 때 read
while (True) { while (counter == 0) ; //do nothing nextConsumed = buffer[out]; out = (out + 1) % BUFFER_SIZE; counter--; }
-
- Counter : 공유 변수
- race condition 발생하는 영역 → inconsistency 발생 가능성
- critical section : race condition이 발생하는 코드
- race condition 발생하는 영역 → inconsistency 발생 가능성
- 해결 : Synchronization → 한 번에 오직 하나의 프로세스만 조작 보장
The Critical-Section Problem
Critical Section Problem
- critical
- critical section (운영체제)
- process, thread가 한 번에 하나씩만 들어가도록
- 동시 access가 이루어지면 안 되는 구간
- critical path (소프트웨어 공학)
- 컴퓨터 시스템에서 성능에 가장 영향을 많이 미치는 경로
- critical path랑 그렇지 않은 path랑 차이가 적어야 좋은 프로그램
- critical section (운영체제)
- 해결법 : 한 번에 한 개만 들어가도록 보장하는 입구, 출구
do { <entry section> // 들어가는 문 critical section <exit section> // 나가는 문 remainder section } while (true); - 조건 : 반드시 만족돼야 해결 ⭐️
-
Mutual Exclusion
- 상호 배타적 접근
- Critical section엔 반드시 하나만
-
Progress
- 기다리고 있는 애가 있으면 반드시 하나는 들어가야 됨.
- 다 막아버리면 X
-
Bounded Waiting
- 유한한 기다림
- starvation 발생 X→ 모두 만족해야 critical section problem이 해결됨
-
임계 구역 문제의 해결
- 비선점형 커널
- 명령어(load, add, store) 수행할 동안 interrupt disable
- race condition 발생 X
- 성능 저하 → 선점형 커널 사용
- 선점형 커널 (선호)
- 높은 응답성, 실시간 프로그래밍에 적당
- race condition은? → Peterson’s Solution
Peterson’s Solution
Peterson’s Solution
-
충돌 발생 시 상대에게 먼저 양보
-
int turncritical section에 들어갈 process -
bool flag[i]Pi가 들어갈 준비가 되었는지 여부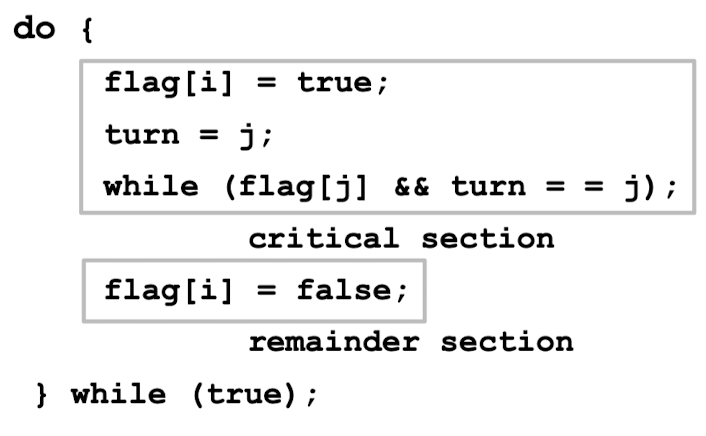
→ turn을 서로 양보해준다.
-
-
Mutual exclusion 만족
-
Pi :
flag[j] == falseorturn == i인 상태에서만 들어감 -
Pj :
flag[j] == true인 상태에서만 들어감→ Pi, Pj는 동시에 들어갈 수 X
-
-
Progress 만족
- Pi :
flag[j] == true && turn == j인 경우에만 멈춤 → busy waiting
- Pi :
-
Bounded waiting 만족
- Pi : Pj의 한 번의 출입 후에 들어감
Hardware Support for Synchronization
Synchronization Hardware
-
Peterson’s Solution 적용 어려움
- 최신 컴퓨터 구조 : 성능 향상을 위해 종속성이 없는 작업들 재정렬 → Peterson’s Solution 보장 X
- 최신 컴퓨터 구조 : 성능 향상을 위해 종속성이 없는 작업들 재정렬 → Peterson’s Solution 보장 X
-
atomic operation 이 필요
- H/W : 명령어 간 순서가 변경되지 않는 operation 지원
- locking : critical section에 들어올 때 lock 필요 → 나갈 때 lock 풀어줌
-
test_and_set()
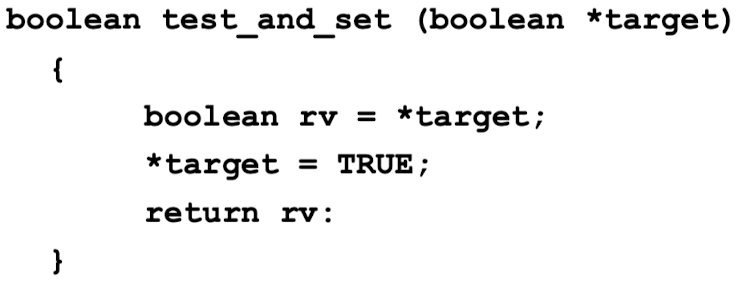
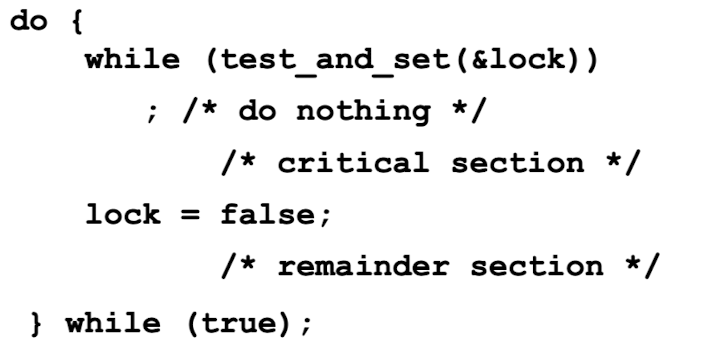
- target이 0일 때 가져와서 1로 바꾸면 lock 얻음 → return이 0이면 lock 획득한 것
- target이 1일 때 가져오면 lock 풀릴 때까지 기다림
- target이 0일 때 가져와서 1로 바꾸면 lock 얻음 → return이 0이면 lock 획득한 것
-
compare_and_swap
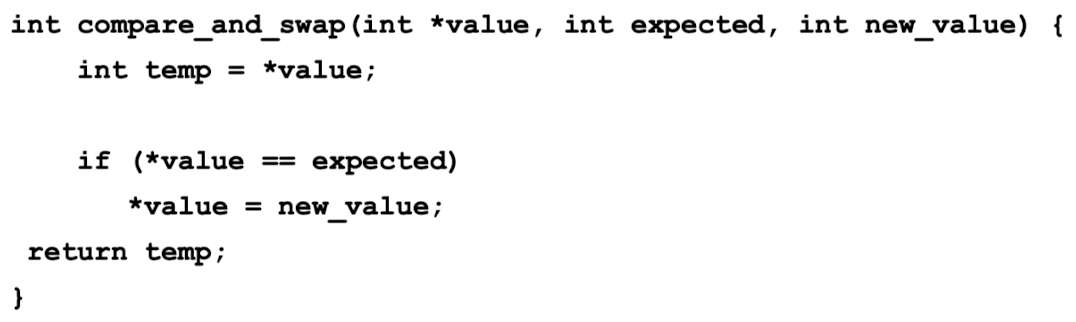 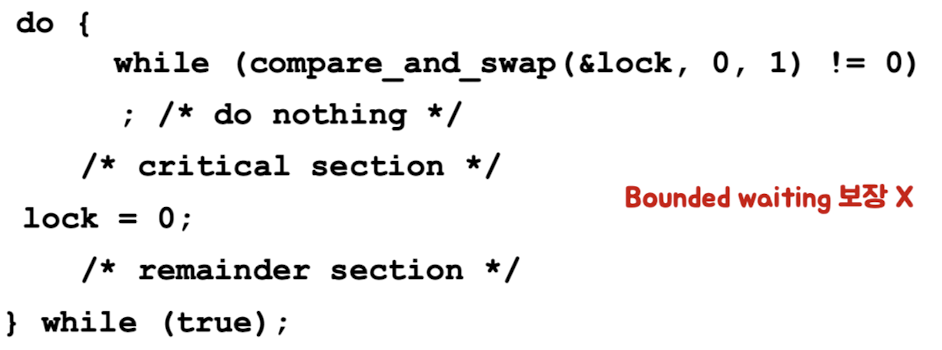 - expected = 0, new_value = 1 - test_and_set()과 동일, 같은 기능→ Bounded waiting 보장 X
-
Bounded waiting 보장
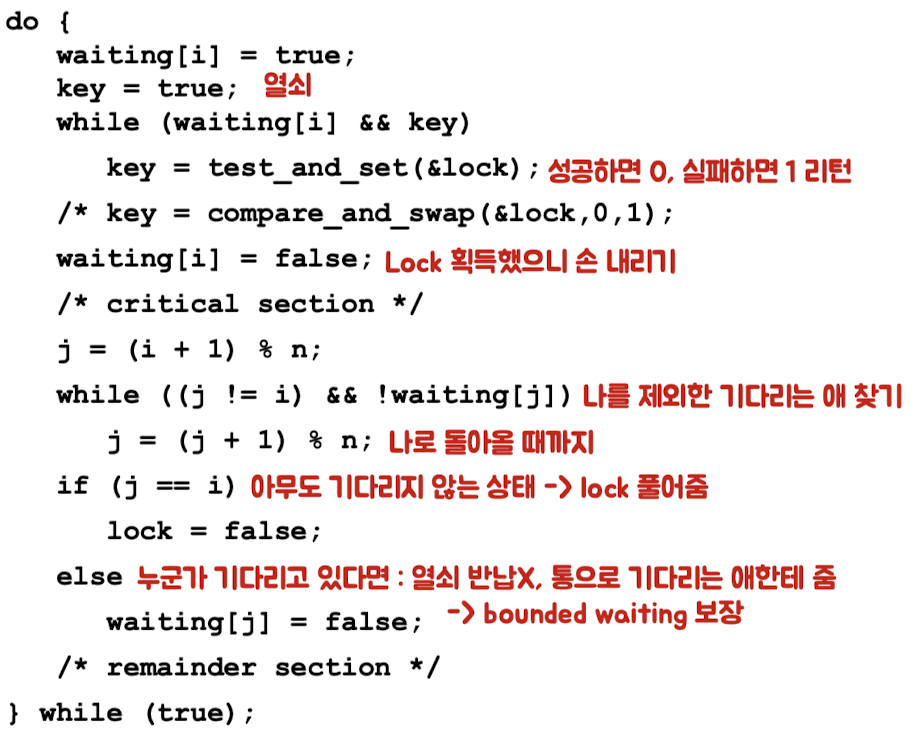
- 사용하기 불편함 → 대신 Mutex lock, semaphore 등을 사용
- 사용하기 불편함 → 대신 Mutex lock, semaphore 등을 사용
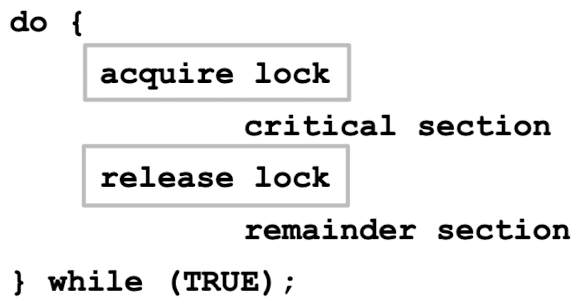
Mutex Locks
Mutex Lock
- mutex : mutual exclusion 상호배제
- critical section 보호
- race condition 방지
- atomic 수행 보장
- lock
-
사용 가능 X → busy waiting
-
사용 가능 → available = false로 변경 후 자기만 사용
acquire() { while (!available) /* busy wait */ available = false; } release() { available = true } do { <acquire lock> /* ciritical section */ <release lock> /* remainder section */ } while (true);
-
- 단점
- busy waiting : CPU cycle 낭비 → Spinlock : context switch 시간 X (무조건 나쁜 게 아니다!)
- 공유자원 하나만 control 가능 → 여러 개에 대해 동일한 control : Semaphore
- busy waiting : CPU cycle 낭비 → Spinlock : context switch 시간 X (무조건 나쁜 게 아니다!)
Semaphores
Semaphore
- Semaphore
- Integer semaphore : 공유자원 2개 이상
- integer variable : 공유 자원 control 개수 → cf. Mutex Lock : 0, 1 (2개만 있을 때)
- integer variable : 공유 자원 control 개수 → cf. Mutex Lock : 0, 1 (2개만 있을 때)
- Binary semaphore = mutex lock : 1개
- Integer semaphore : 공유자원 2개 이상
- wait(), signal() → P(), V() 라고도 함
wait(S) { while (S <= 0) /* busy wait */ S--; } signal(S) { S++; } - 순서 control 가능
-
S1 끝나야 S2 실행되도록
-
synch = 0 초기화
P1: S1; signal(synch); P2: wait(synch); S2;
-
Semaphore Implementation
- busy waiting
- semaphore 값 < 0
- 성능 저하
- block → wakeup
- 재우는 것, run → wait(stop)
- waiting queue 구현
- PCB 리스트 가리키는 포인터 존재
typedef struct {
int value; //semaphore 값
//음수 : 대기중인 프로세스 개수, 양수 : 이용가능한 자원 개수
struct process *list; //대기 중인 PCB 리스트 가리키는 포인터
} semaphore;
wait(semaphore *S) {
S -> value--;
if (S -> value < 0) {
add this process to S -> list;
block();
}
}
signal(semaphore *S) {[
S -> value++;
if (S -> value <= 0) {
remove a process P from S -> list;
wakeup(P);
}
}- 동일 semaphore에 대해 둘 이상의 프로세스가 동시에 wait(), signal() 연산 atomic하게 실행하도록 보장 → interrupt disable
Problems with Semaphores
- 틀린 사용 Honest programming error
- signal → wait
- wait → wait
- Deadlock, starvation 발생 가능
→ Monitor : Simple Synchronization Tool
Monitors
Monitors
- high-level abstraction
- Semaphore보다 error 발생 확률 낮음
- 동기화 쉬워짐
- Java, Python
- Abstract Data Type
-
내부 변수는 오직 code를 통해서만 접근 가능
-
monitor내의 함수들은 한 번에 하나씩만 활성화 가능
monitor monitor_name { function P1 (..) {...} ... function Pn (..) {...} Initialization code (..) {...} } }
-
Condition Variables
- 기본 모니터 : 여러 동기화 scheme 모델링을 위해 충분히 강력 X → 조건 변수 도입

- 조건 : x, y → 하나 이상의 조건 타입의 변수 정의 가능
- 연산
-
X.wait()
호출한 프로세스 일시 중단
-
X.signal()
- 보류 중인 프로세스 존재 → X.wait()을 호출한 프로세스 중 하나만 재개
- 보류 중인 프로세스 X → 아무 일도 발생 X (Semaphore와의 차이점)
- 보류 중인 프로세스 존재 → X.wait()을 호출한 프로세스 중 하나만 재개
-
Condition Variables Choices
- 프로세스 P → x.signal() 호출 프로세스 Q → x.wait()에서 일시 중단
- 병행 실행 X
-
Signal and wait
- P : Q가 모니터 떠날 때까지 대기
-
Signal and continue
- Q : P가 모니터 떠날 때까지 대기→ 둘 다 장단점 존재, 프로그래머가 결정
-
Liveness
동기화 고려하다보면 deadlock, starvation 발생 가능
Deadlock
- 두 개 이상의 프로세스가 서로 끝나기를 무한정 기다리고 있는 상황
- live lock : 살아있는데 못 가는 것, CPU 리소스 사용 dead lock : 죽어서 못 가는 것, 사용 X
Starvation
- 특정 프로세스가 자원에 접근하기 위해 무한정 기다려야 하는 상황
- Infinite blocking
Priority Inversion
- priority 역전
- priority : A(signal) < B(wait)
- B의 우선순위가 더 높지만 항상 A가 먼저 실행
- A(signal) : 10, B(wait) : 1, C : 3, D : 5 C → D → A → B
- priority-inheritance protocal
- A가 signal 할 때까지만 A의 우선순위와 B의 우선순위를 바꿔주는 것
- 복잡 → 보통은 안 해줌
+) OS를 사용하는 목적
- Abstraction
- Concurrency → synchronization
- Virtualization → Process 초기화, Memory 가상화
