[CV] #12. 레이블링과 외곽선 검출
Douglas-Peucker AlgorithmapproxPolyDPboundingRectconnectedComponentsconnectedComponentsWithStatsdrawContoursfindContoursminAreaRectopencv더글라스-포이커 알고리즘레이블링외곽선 검출컴퓨터비전
0
Computer Vision
목록 보기
14/18

#12-1. 레이블링
레이블링
- 각각의 객체를 구분, 분석하는 작업
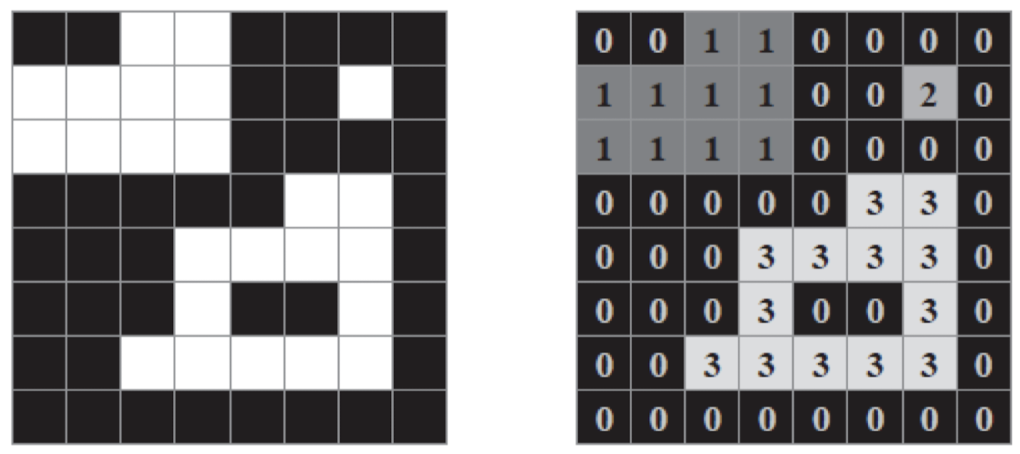
- 구성 요소 레이블링 : 객체 픽셀 집합에 고유 번호를 매기는 작업
- 각 객체의 위치,크기 등의 정보 추출 → 객체 인식을 위한 전처리 과정
- 하나의 객체를 구성하는 모든 픽셀에는 같은 레이블 번호 지정
-
레이블 맵 : 객체 고유의 번호가 매겨진 2차원 정수 행렬
-
0번 레이블 = 배경
-
- 특정 픽셀과 이웃한 픽셀의 연결관계
- 4-방향 연결성(4-way connectivity)
- 특정 픽셀의 상하좌우 붙어있는 픽셀끼리 연결
- 8-방향 연결성(8-way connectivity)
- 상하좌우 + 대각선 방향
- 4-방향 연결성(4-way connectivity)
cnt, labels = connectedComponents(src, connectivity = 8)레이블링 응용
- 객체 영역 위치, 크기 파악
cnt, labels, stats, centroids = connectedComponentsWithStats(src, connectivity = 8)-
stats : 각각의 레이블 영역에 대한 통계 정보
-
centroids : 각각의 레이블 영역의 무게 중심 좌표 정보
→ x좌표(y좌표) 모두 더한 후 픽셀 개수로 나눈 값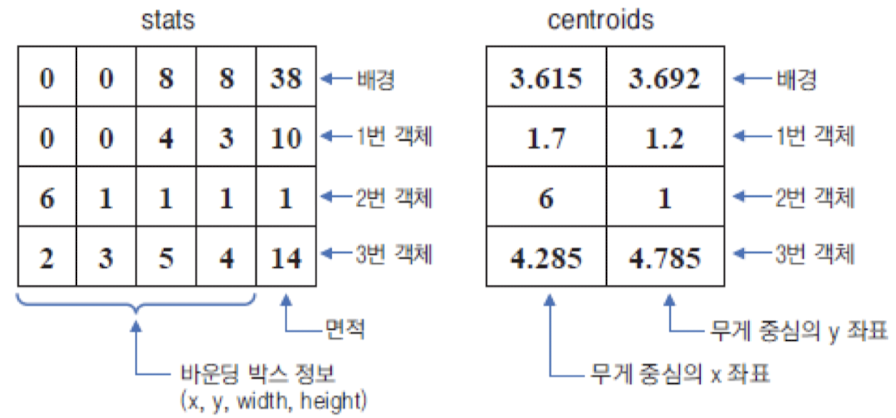
-
- 객체 통계 정보 이용하여 바운딩 박스 표시
_, src_bin = cv2.threshold(src, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) cnt, labels, stats, centroids = cv2.connectedComponentsWithStats(src_bin) dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR) for i in range(1, cnt): (x, y, w, h, area) = stats[i] if area < 20: continue pt1 = (x, y) pt2 = (x + w, y + h) cv2.rectangle(dst, pt1, pt2, (0, 255, 255))
#12-2. 외곽선 검출
외곽선 검출
- contour : 객체 영역 픽셀 중 배경 영역과 인접한 일련의 픽셀
- 객체 바깥쪽 외곽선
- 안쪽 홀 외곽선 : 객체 영역 내부 검은색 배경 영역
- findContours(src, mode, method, offset)
-
mode : 외곽선 검출 모드 RetrievalModes
-
RETR_EXTERNAL : 객체 바깥쪽 외곽선만, 계층 구조 X
-
RETR_LIST : 모두, 계층 구조 X
-
RETR_CCOMP : 모두, 2단계 계층 구조
→ 상위 외부외곽선, 하위 내부내곽선
-
RETR_TREE : 모두, 전체 계층 구조
계층 구조 : 감지된 객체들 간의 관계 나타내는 방법
-
-
method : 외곽선 근사화 방법 ContourApproximationModes
- CHAIN_APPROX_NONE : 모든 외곽선 점들의 좌표
- CHAIN_APPROX_SIMPLE : 외곽선 중 수평선, 수직선, 대각선 성분은 끝점만 저장
- CHAIN_APPROX_TC89_L1 : Teh & Chin L1 근사화 적용
- CHAIN_APPROX_TC89_KCOS : Teh & Chin k cos 근사화 적용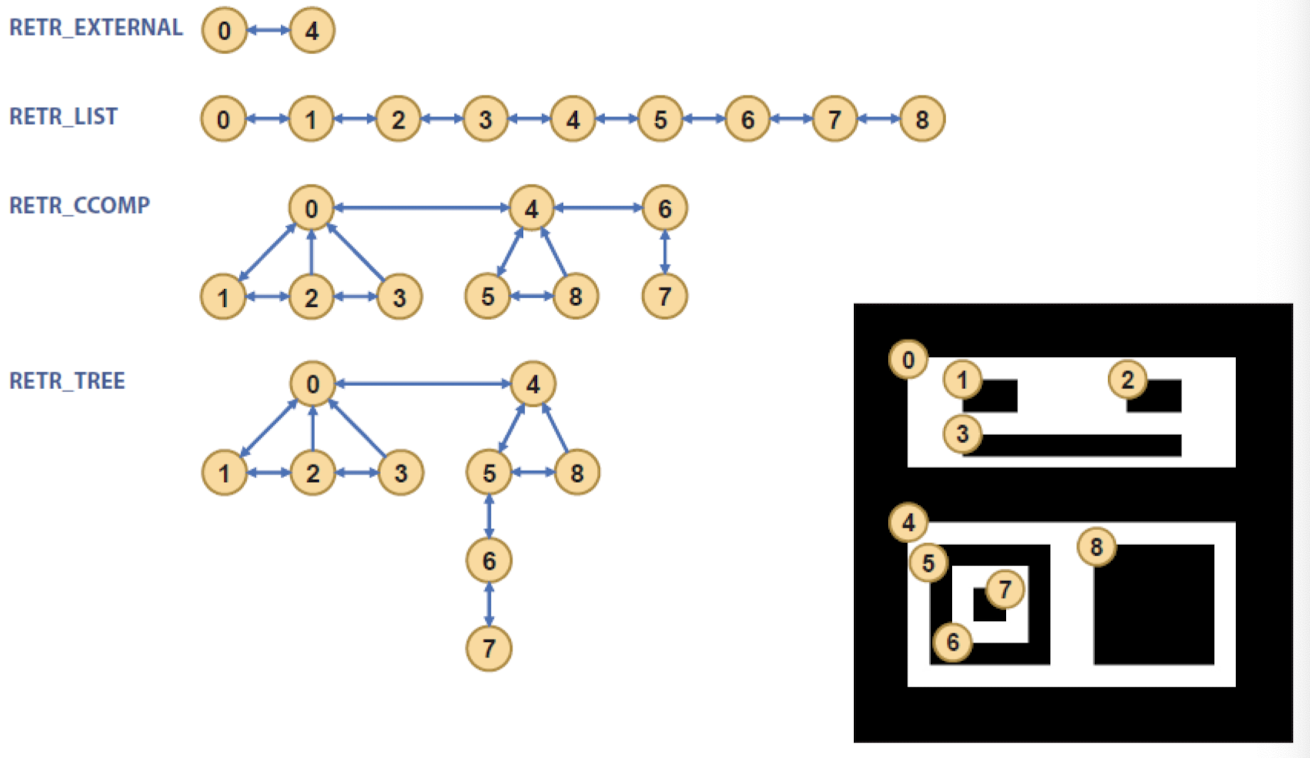
-
- 외곽선 정보 그리기
-
drawContours(src, contours, contourIdx, color, thickness=1, lineType=LINE_8, hierarchy, maxLevel = INT_MAX)
contours, _ = cv2.findContours(src_bin, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR) for i in range(len(contours)): # len(contours) : 전체 외곽선 개수 c = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255)) cv2.drawContours(dst, contours, i, c, 2)_, src_bin = cv2.threshold(src, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) contours, hierarchy = cv2.findContours(src_bin, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE) dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR) idx = 0 while idx >= 0: c = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255)) cv2.drawContours(dst, contours, idx, c, -1, cv2.LINE_8, hierarchy) idx = hierarchy[0, idx, 0]
-
외곽선 처리 함수
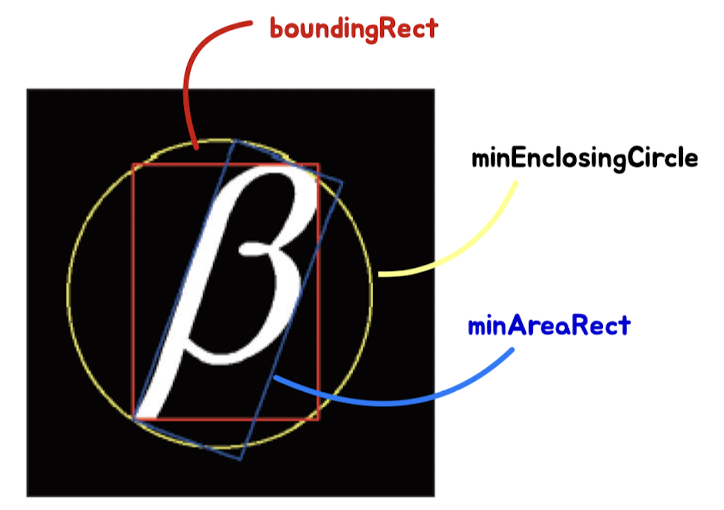
- 바운딩 박스 : 외곽선 점을 감싸는 가장 작은 크기의 사각형
- boundingRect(points)
- points : 입력 점들의 집합
- 최소 크기의 회전된 사각형
- minAreaRect(points)
- 최소 크기의 원
- minEnclosingCircle(points, center, radius)
- 임의의 곡선을 형성하는 점들의 집합 → 해당 곡선의 길이
- arcLength
더글라스-포이커(Douglas-Peucker) 알고리즘
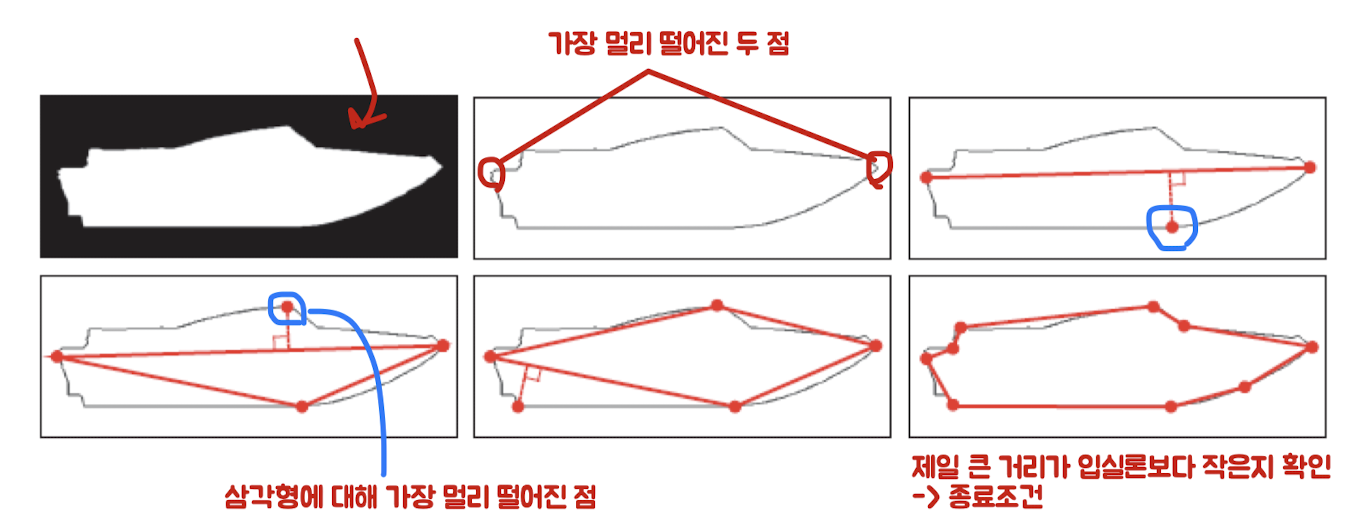
- 입력 외곽선에서 가장 멀리 떨어진 두 점 찾아 직선으로 연결
- (반복) 직선에서 가장 멀리 떨어진 외곽선 상의 점 찾기 → 근사화 점으로 추가
- (종료조건) 새로 추가할 점과 근사화에 의한 직선과의 수직거리 < epsilon 인자
- approxPolyDP(curve, approxCurve, epsilon,closed)
_, src_bin = cv2.threshold(src, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) contours, _ = cv2.findContours(src_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) for pts in contours: if cv2.contourArea(pts) < 400: continue approx = cv2.approxPolyDP(pts, cv2.arcLength(pts, True) * 0.02, True) vtc = len(approx) # 꼭지점 개수 if vtc == 3: setLabel(src, pts, 'TRI') elif vtc == 4: setLabel(src, pts, 'RECT') else: lenth = cv2.arcLength(pts, True) area = cv2.contourArea(pts) ratio = 4. * math.pi * area / (lenth * lenth) if ratio > 0.05: setLabel(src, pts, 'CIR')

숭실대학교 컴퓨터학부 21