[CV] #09. 에지 검출과 응용
Computer Vision
#09-1. 에지 검출
Edge
- 한쪽 방향으로 픽셀 값이 급격하게 바뀌는 부분
- 어두운 영역 → 갑자기 밝아짐
- 밝은 영역 → 갑자기 어두워짐
- 주로 객체와 배경의 경계, 객체와 다른 객체의 경계에서 발생 → 객체의 윤곽 알아내는 유용한 방법
- 객체 판별을 위한 전처리로 사용
미분과 그래디언트
-
Edge : 픽셀 값의 변화율 측정
→ 변화율이 큰 픽셀 선택
-
미분(derivative) : 데이터의 변화율, 순간 변화율
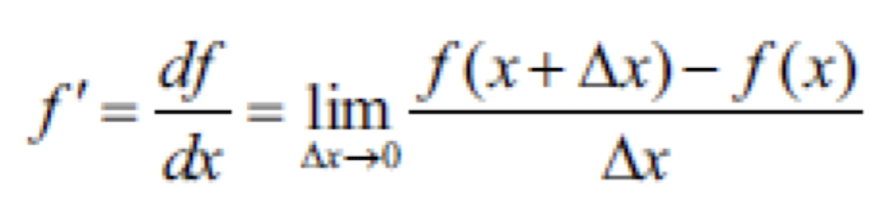
- x의 변화량이 무한히 0에 가까워질 때의 함수값 변화량
- 함수값 증가 : 양수
- 함수값 감소 : 음수
-
급격하게 바뀌는 부분
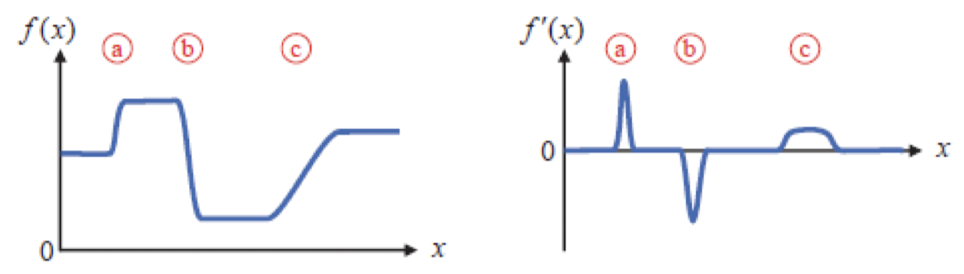
- 미분 값이 0보다 훨씬 크거나 훨씬 작은 위치 : a, b
- c : 일정한 기울기로 증가 → 미분값 : 일정한 양수값
-
2차원 평면
- 정형화 X → 미분 공식 적용 X
- 정수 단위 좌표에 픽셀이 나열되어 있는 이산함수
-
미분 근사화 방법
-
1차원 이산함수(영상) 에서 미분 구하는 방법
-
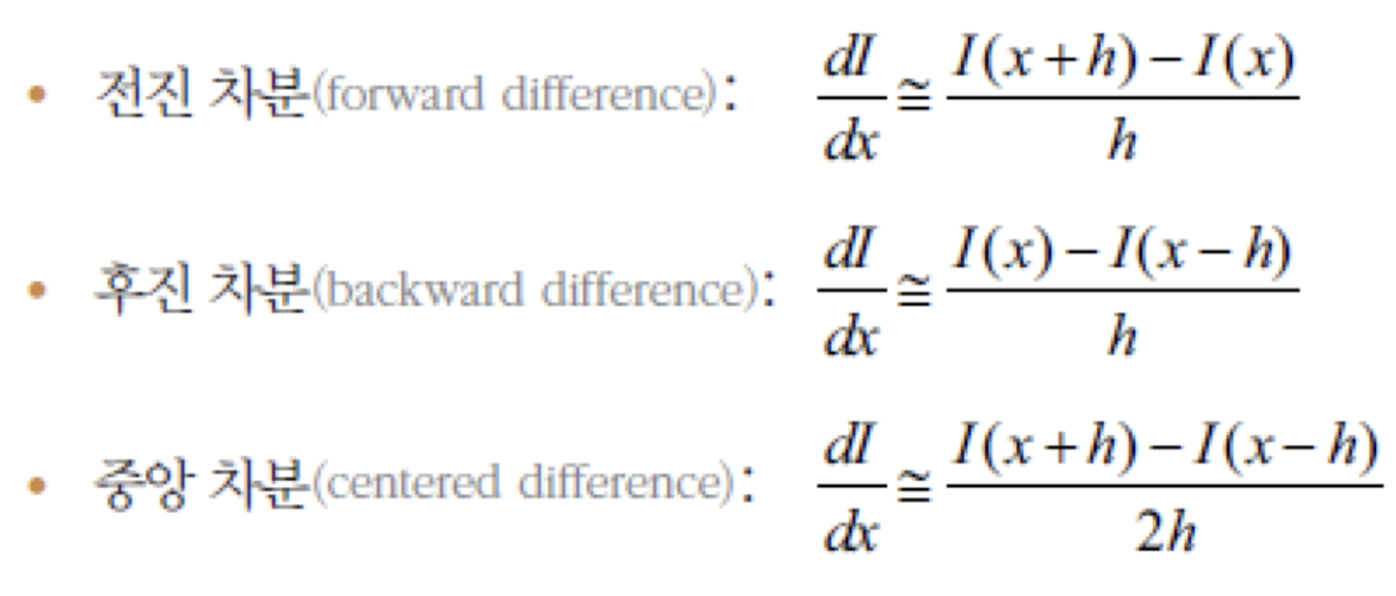
이산함수에 대한 미분 근사
- I(x) : 1차원 이산함수 h : 이산 값의 간격 (픽셀의 간격 = 1)
- 전진 차분
- I(x + 1) - I(x)
- 바로 앞에 있는 픽셀에서 자신의 픽셀 값을 뺀 값
- 후진 차분
- I(x) - I(x - 1)
- 자신의 픽셀에서 바로 뒤에 있는 픽셀 값을 뺀 값
- 중앙 차분
-
(I(x + 1) - I(x - 1)) / 2
-
바로 앞 뒤에 있는 픽셀값 이용
→ 근사화 오류 가장 적음, 널리 사용
-
2차원 평면에서의 미분
- 가로 방향, 세로 방향으로 각각 미분
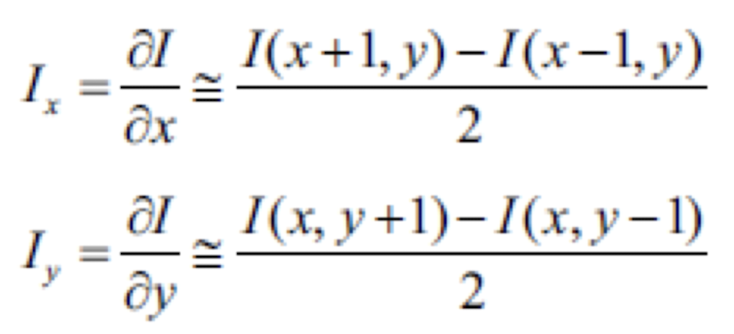
- I(x, y) 가로 방향 미분
-
y좌표 고정
-
x축 방향으로만 미분 근사 계산
→ x축 방향으로의 편미분(partial derivative) = Ix
-
1 x 3 필터 마스크

-
- I(x, y) 세로 방향 미분 → x좌표 고정한 상태에서 y축 방향으로의 편미분 = Iy
- 3 x 1 필터 마스크
- 3 x 1 필터 마스크
에지 검출
-
미분 결과 시각적 분석 = 미분값 + 128
-
0 ~ 255 정수 형 변환 → 그레이스케일 영상으로
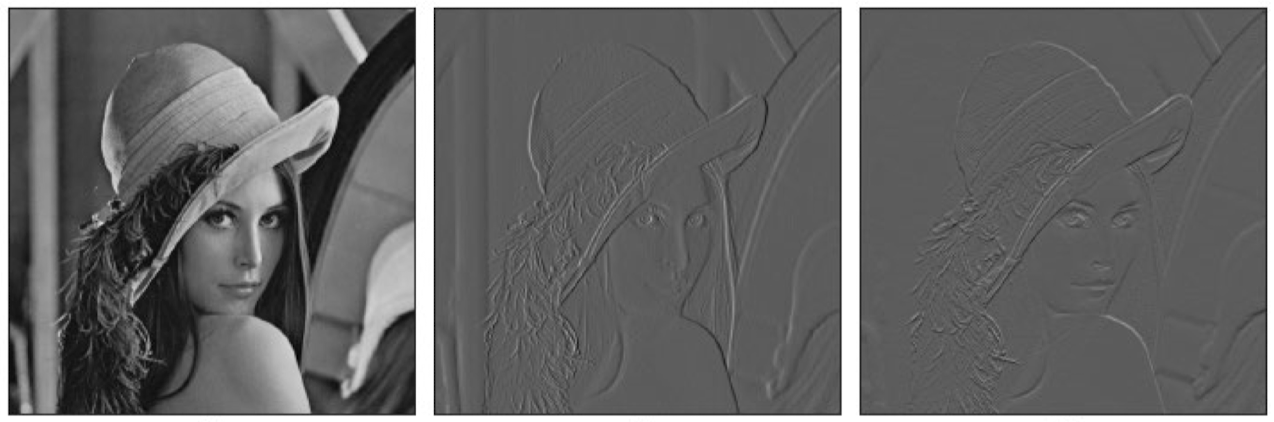
원본, x좌표 증가함에 따른 변화, y좌표 증가함에 따른 변화
- 회색 영역 (128) : 픽셀값 변화 작은 부분
- 흰색 영역 : 픽셀값 크게 증가하는 부분
그래디언트
-
2차원 : x축 방향, y축 방향 편미분 모두 사용
→ gradient : x축, y축 방향 미분을 한 번에 벡터로 표현한 것(합성, 방향성)
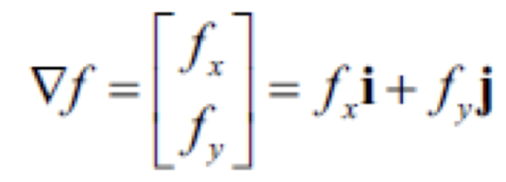
-
벡터
- 크기 (magnitude), 방향(phase) 성분 표현 가능
- 방향 : 변화 정도가 가장 큰 방향
- 크기 : 변화율 세기를 나타내는 척도
- 방향
-
Example>
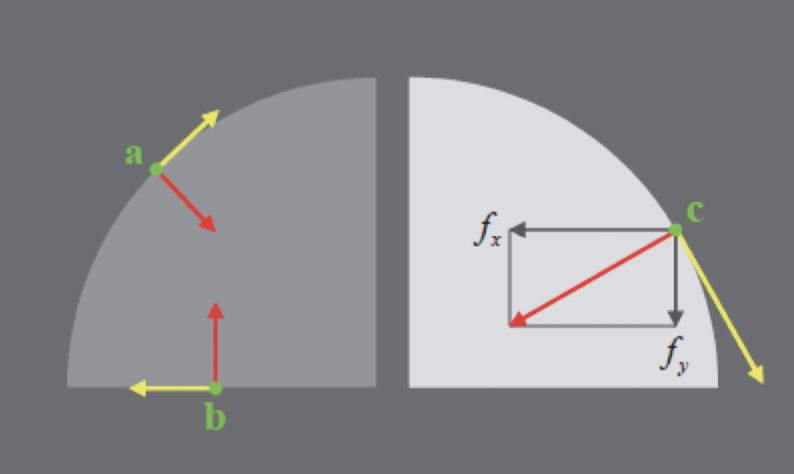
- 빨간색 화살표 길이 : 그래디언트 크기
- 화살표 방향 : 그래디언트 벡터의 방향
- 밝기 차이 클수록, 길게 : c > a, b
- 노란색 화살표 : 에지의 방향 (그래디언트 수직) → 그래디언트에서 반시계로 90도 꺾은 방향 → 경계선 검출에 활용
-
threshold
- 에지 여부 판단의 기준값, 임계값, 문턱치
- 높은 임계값 : 밝기 차이 급격한 에지 픽셀만 검출
마스크 기반 에지 검출
- x축 방향 편미분 소벨 마스크
-
현재 행에 대한 중앙 차분 연산 2회
→ 더 큰 가중치 목적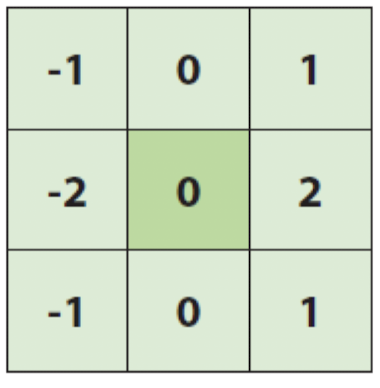
-
- y축 방향 편미분 소벨 마스크
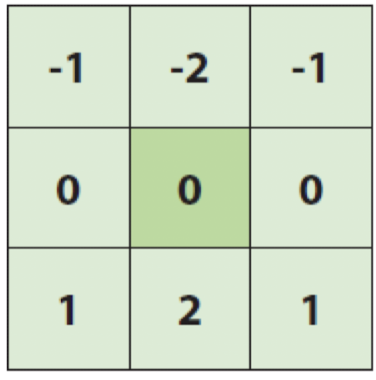
- 이웃행과의 픽셀 값 변화 유사 → 잡음 감소
mx = np.array([[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]], dtype = np.float32)
my = np.array([[-1, -2, -1],
[0, 0, 0],
[1, 2, 1]], dtype = np.float32)
dx = cv2.filter2D(src, -1, mx, delta = 128)
dy = cv2.filter2D(src, - 1, my, delta = 128)소벨(Sobel) 필터
- Sobel(src, dst, ddepth, dx, dy, ksize = 3, scale = 1, delta = 0, borderType = BORDER_DEFAULT);
- ddepth : 출력 영상 깊이 → ddepth = -1 : src와 같은 타입을 사용하는 dst 영상 생성
- ksize : 소벨 커널의 크기 → ksize = 1 : 3x1, 1x3 커널 / ksize = 3 : 3x3 커널
- scale : 추가적으로 곱할 값
- delta : 추가적으로 더할 값
- borderType : 가장자리 픽셀 확장
- ddepth : 출력 영상 깊이 → ddepth = -1 : src와 같은 타입을 사용하는 dst 영상 생성
- 고차미분 가능, 대부분 1차 미분 구하는 용도로 사용
-
x(y)방향으로 편미분한 결과 dx(dy) 행렬에 저장
Mat dx, dy; Sobel(src, dx, CV_32FC1, 1, 0); Sobel(src, dy, CV_32FC1, 0, 1);
-
def sobel_edge():
# src, ksize, scale, delta
dx = cv2.Sobel(src, cv2.CV_32F, 1, 0)
dy = cv2.Sobel(src, cv2.CV_32F, 0, 1)
fmag = cv2.magnitude(dx, dy) # 실수형 행렬
mag = np.uint8(np.clip(fmag, 0, 255)) # 그레이스케일로 변환
# clip : 255 넘어가면 잘라내기
_, edge = cv2.threshold(mag, 150, 255, cv2.THRESH_BINARY)
cv2.imshow('src', src)
cv2.imshow('mag', mag)
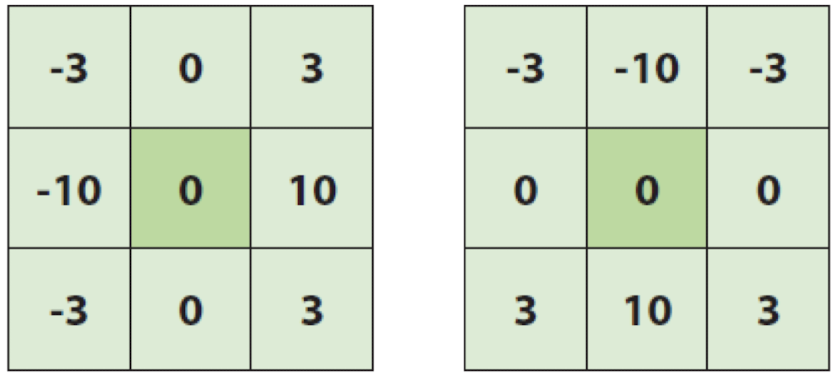
cv2.imshow('edge', edge)샤르(Scharr) 필터
- 3x3 소벨 마스크보다 정확한 미분 계산
-
Sobel().ksize = -1 || FILTER_SCHARR : 샤르 마스크 사용
-
- Scharr(src, dst, ddepth, dx, dy, scale = 1, delta = 0, borderType = BORDER_DEFAULT);
그래디언트
- 2차원 벡터의 x 방향 좌표, y방향 좌표 → 그래디언트(벡터) 크기 계산
- magnitude(x, y, magnitude);
- x, y : CV_32F, CV_64F 깊이의 행렬(벡터)
- 그래디언트 방향 계산
- phase(x, y, angle, angleInDegrees = false);
- 출력
- angleInDegrees : true (단위 degree) / false (단위 radian)
캐니 에지 검출기
- Sobel 에지 검출 방법의 단점 해결
- 에지 검출 조건 : 정확한 검출, 정확한 위치, 단일 에지
- 그래디언트 크기, 방향 모두 고려 → 더 정확한 에지 위치
- 에지는 서로 연결 ! → 그래디언트가 약하게 나타나는 에지도 검출
캐니 에지 검출기 연산과정
- 가우시안 필터링
- 영상의 잡음 제거 (생략 가능)
- 에지 세기 감소 : 적절한 표준 편차 선택
- 그래디언트 계산
- 3 x 3 소벨 마스크 사용
- 가로, 세로 방향 소벨 마스크 필터링 → 그래디언트 크기, 방향 계산
- 그래디언트 크기 : L2 norm, L1 norm (연산 속도 향상, 기본값)
- 비최대 억제 non-maximum suppression
- 에지가 두껍게 (여러 픽셀) 표현되는 현상 방지
- 그래디언트 크키 : local maximum인 픽셀만
- 그래디언트 벡터의 방향과 같은 방향에 있는 인접 픽셀끼리만 검사
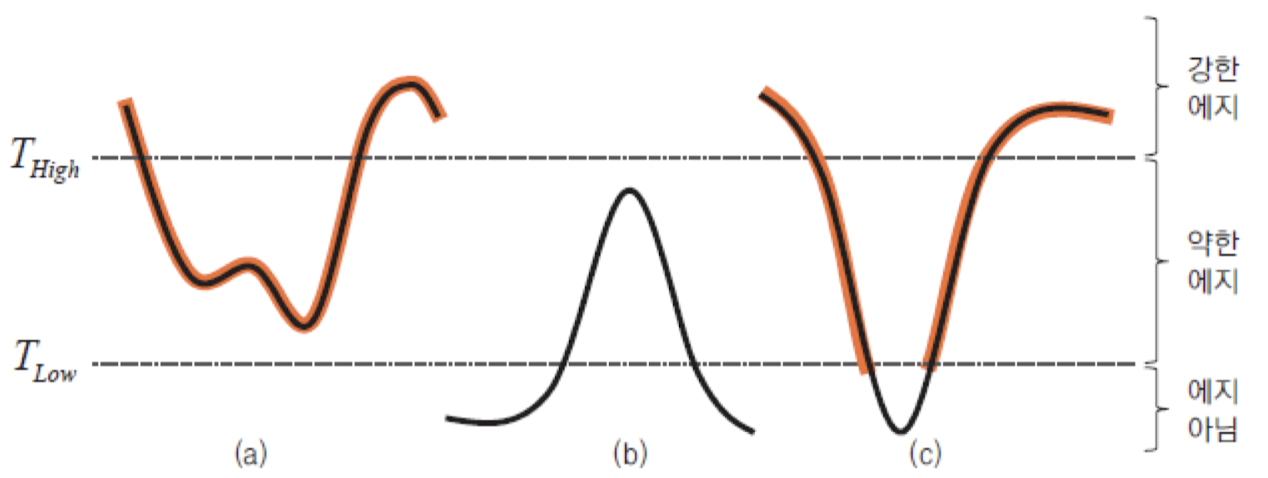
- 이중 임계값을 이용한 히스테리시스 에지 트래킹
- 하나의 임계값 : 환경 변화에 민감 → 캐니 에지 검출기 : 두 개의 임계값 사용 ,
- 그래디언트 크기
- : 보다 높으면 무조건 edge → strong edge
- ~ : edge일 수도 아닐 수도 → weak edge
- : 보다 낮으면 무조건 edge 아님
- : 보다 높으면 무조건 edge → strong edge
- hysteresis edge tracking
-
weak edge를 최종적으로 판별
-
strong edge와 연결되어있는지가 기준 : edge direction
-
- 하나의 임계값 : 환경 변화에 민감 → 캐니 에지 검출기 : 두 개의 임계값 사용 ,
OpenCV Canny()
- Canny(dx,dy, edges, threshold1, threshold2, L2gradient = false);
- dx(dy) : x(y)방향 미분 영상, CV_16SC1, CV_16SC3
- edges : 출력 에지 영상
- Canny(image, edges, thresdhold1, thresdhold2, apertureSize = 3, L2gradient = false)
- apertureSize : 그래디언트 계산을 위한 소벨 마스크 크기
def canny_edge():
dst1 = cv2.Canny(src, 50, 100) # 두 개의 임계값 사용
dst2 = cv2.Canny(src, 50, 150)
cv2.imshow('src', src)
cv2.imshow('dst1', dst1)
cv2.imshow('dst2', dst2)→ 임계값 낮출수록 : 더 많은 에지 픽셀 검출, 잡음에 해당하는 픽셀도 검출
#09-2. 직선 검출과 원 검출
허프 변환 직선 검출
-
hough transform
-
edge 검출 → 일직선상에 배열되어있는지 확인
-
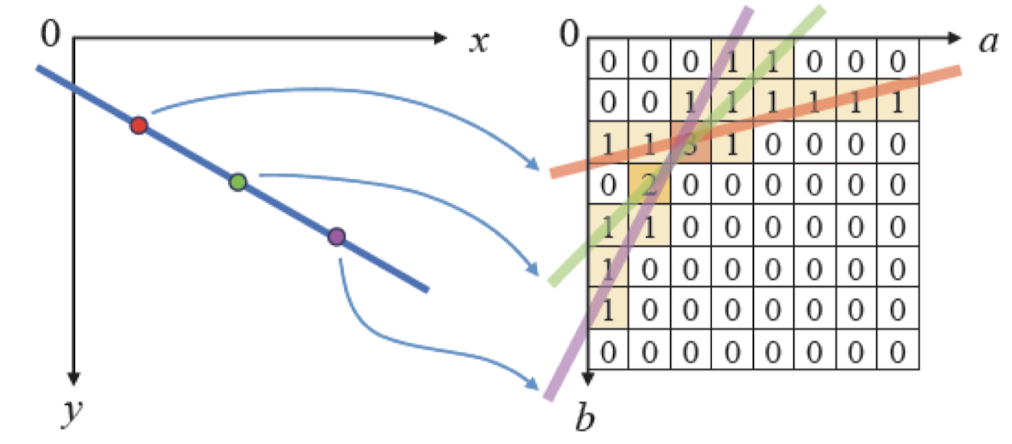
2차원 xy좌표 직선의 방정식 → 파라미터 공간으로 변환
- y = ax + b
- a : 기울기 (slope), b : y절편 (y intersection)
- parameter 공간(a, b) 으로 변환 : b = -xa + y
-
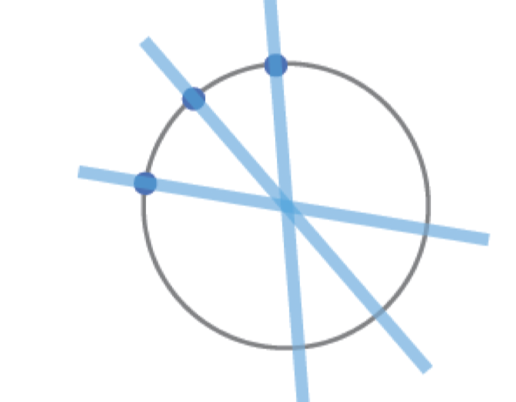
직선이 많이 교차되는 점(교점) 찾기
-
축적 배열 (accumulation array) 사용
-
0으로 초기화된 2차원 배열에서 직선이 지나가는 위치의 배열 원소값++
-
-
한계 : x = 3 (기울기 : 무한대) → 표현 불가
- 극 좌표계 형식의 직선의 방정식 사용 → 국지점 최댓값 발생하는 위치에서의 ρ, θ 값 찾기

- 로우 : 원점에서 직선까지의 수직 거리
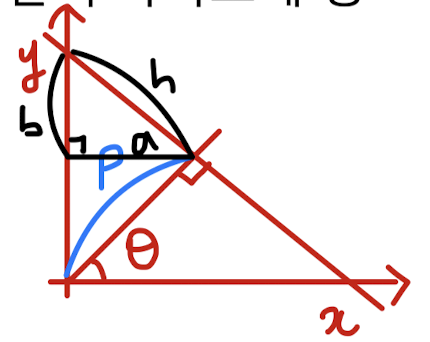
- ρ θ 공간에서의 교점 : xy 공간의 파란색 직선을 나타내는 파라미터
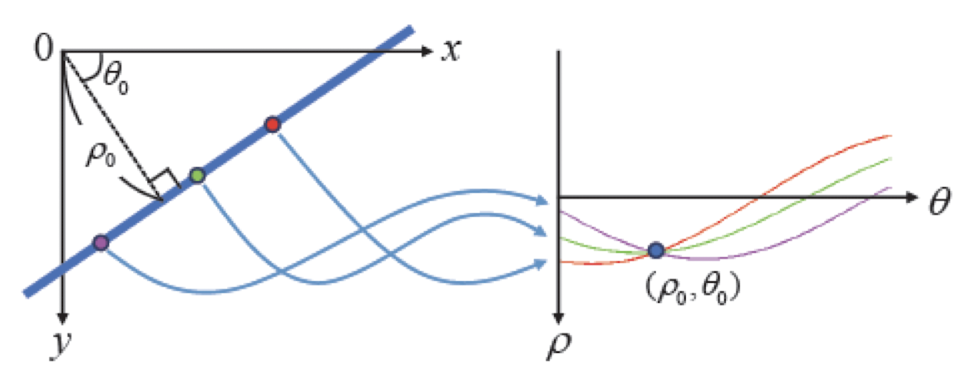
- ρ, θ 실수값 → 양자화(quantization) 과정 필요
- 0 ≤ θ ≤ → 180단계, 360단계
- 구간 촘촘할수록 정밀한 직선 검출, 연산 시간 증가
- 극 좌표계 형식의 직선의 방정식 사용 → 국지점 최댓값 발생하는 위치에서의 ρ, θ 값 찾기
OpenCV HoughLines()
- HoughLines(image, lines, rho, theta, threshold, srn=0, stn=0, min_theta=0, max_theta=CV_PI)
- rho : 축적 배열에서 ρ 값의 해상도 (픽셀 단위) → 몇 픽셀 단위로 양자화할 것인지
- lines : 직선 정보(ρ, θ) 저장
- theta : 축적 배열에서 θ 값의 해상도 (라디안 단위 주의!)
- threshold : 축적 배열에서 직선으로 판단할 임계값
- rho : 축적 배열에서 ρ 값의 해상도 (픽셀 단위) → 몇 픽셀 단위로 양자화할 것인지
- 영상 위에 빨간색 직선 그려서 나타내기
# math.pi = 180도, math.pi/180 -> 1도 단위 edge = cv2.Canny(src, 50, 150) lines = cv2.HoughLines(edge, 1, math.pi/180, 250) dst = cv2.cvtColor(edge, cv2.COLOR_GRAY2BGR) if lines is not None: for i in range(lines.shape[0]): rho = lines[i][0][0] theta = lines[i][0][1] cos_t = math.cos(theta) sin_t = math.sin(theta) x0, y0 = rho * cos_t, rho * sin_t alpha = 1000 # 충분히 크게 설정 필요 pt1 = (int(x0 - alpha * sin_t), int(y0 + alpha * cos_t)) pt2 = (int(x0 + alpha * sin_t), int(y0 - alpha * cos_t)) cv2.line(dst, pt1, pt2, (0, 0, 255), 2, cv2.LINE_AA)
확률적 허프 변환
- probabilistic Houghtransform에 의한 직선 검출
- 직선의 방정식 파라미터 ρ, θ 반환 X → 직선의 시작점, 끝점 반환 (선분 찾기)
- HoughLinesP(image, lines, rho, theta, threshold, minLineLength = 0, maxLineGap = 0)
-
minLineLength : 검출할 선분의 최소 길이
-
maxLineGap : 직선으로 간주할 최대 에지 점 간격
edge = cv2.Canny(src, 50, 150) lines = cv2.HoughLinesP(edge, 1, math.pi / 180, minLineLength=50, maxLineGap=5) dst = cv2.cvtColor(edge, cv2.COLOR_GRAY2BGR) if lines is not None: for i in range(lines.shape[0]): pt1 = (lines[i][0][0], lines[i][0][1]) pt2 = (lines[i][0][2], lines[i][0][3]) cv2.line(dst, pt1, pt2, (0,0,255), 2, cv2.LINE_AA)
-
허프 변환 원 검출
- → 파라미터 3개
- 3차원 파라미터 공간에서 축적 배열 정의
- 많은 메모리, 연산 시간 → Hough gradient method 사용
허프 그래디언트
-
방법
-
영상에 존재하는 모든 원의 중심 좌표 찾기
- 축적 배열 사용 (파라미터 공간X, xy좌표 공간)
- 입력 영상의 모든 에지 픽셀의 그래디언트 구하기
- 그래디언트 방향을 따르는 직선상의 축적 배열 값 +1
-
원의 중심으로부터 적합한 반지름 구하기
- 다양한 반지름에 대해 원주 상에 충분히 많은 에지 픽셀이 존재하는지 확인
-
-
HoughCircles(image, circles, method, dp, minDist, param1 = 100, param2 = 100, minRadius = 0, maxRadius = 0)
- method : HOUGH_GRADIENT만 지정 가능
- dp : 입력 영상, 축적 배열의 크기 비율
- minDist : 인접한 원 중심의 최소 거리
- param1 : Canny 에지 검출기의 높은 임계값
- param2 : 축적 배열에서 원 검출을 위한 임계값
- minRadius, maxRadius : 검출할 원의 최소/최대 반지름
blurred = cv2.blur(src, (3, 3)) # 잡음제거용
circles = cv2.HoughCircles(blurred, cv2.HOUGH_GRADIENT, 1, 50,
param1=150, param2=30)
dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
if circles is not None:
for i in range(circles.shape[1]):
cx, cy, radius = circles[0][i]
cv2.circle(dst, (cx, cy), radius, (0,0,255), 2, cv2.LINE_AA)