0. 참고자료
0.1. 역링크
0.2. 링크
- tsdf_map: https://velog.io/@jk01019/voxblox-tsdfmap.h
- tsdf_integrator: https://velog.io/@jk01019/voxblox-voxbloxsrcintegratortsdfintegrator.cc
- icp: https://velog.io/@jk01019/voxblox-voxbloxsrcalignmenticp.cc
0. TsdfServer
0.1. 생성자
tf_buffer_ / tf_listener_생성- tsdfmap
- TsdfMap(config)
- tsdfintegrator
- FastTsdfIntegrator(integratorconfig, tsdf_map->getTsdfLayerPtr())
- meshintegrator
MeshIntegrator<TsdfVoxel>( mesh_config, tsdf_map_->getTsdfLayerPtr(), mesh_layer_.get())- meshlayer
- MeshLayer
- meshlayer
- subscriber
- imusubscription
- /camera/camera/imu
- OnImu 콜벡이 아무것도 안하고 있음
- pointcloudsubscription
- "/camera/camera/depth/color/points"
- OnPclFrame 콜벡
- imusubscription
- publisher
1. tsdf_server.h
1. 클래스 개요
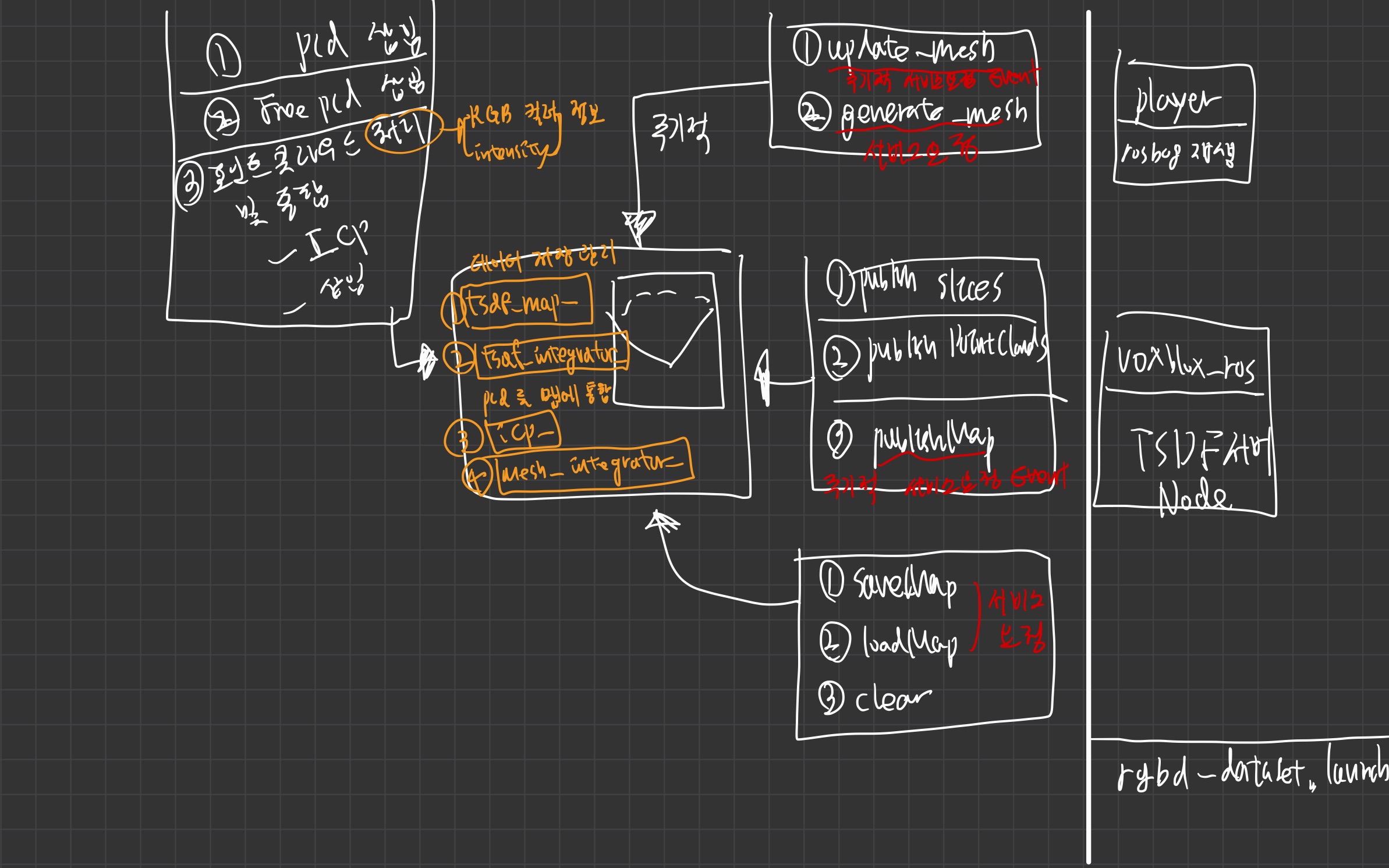
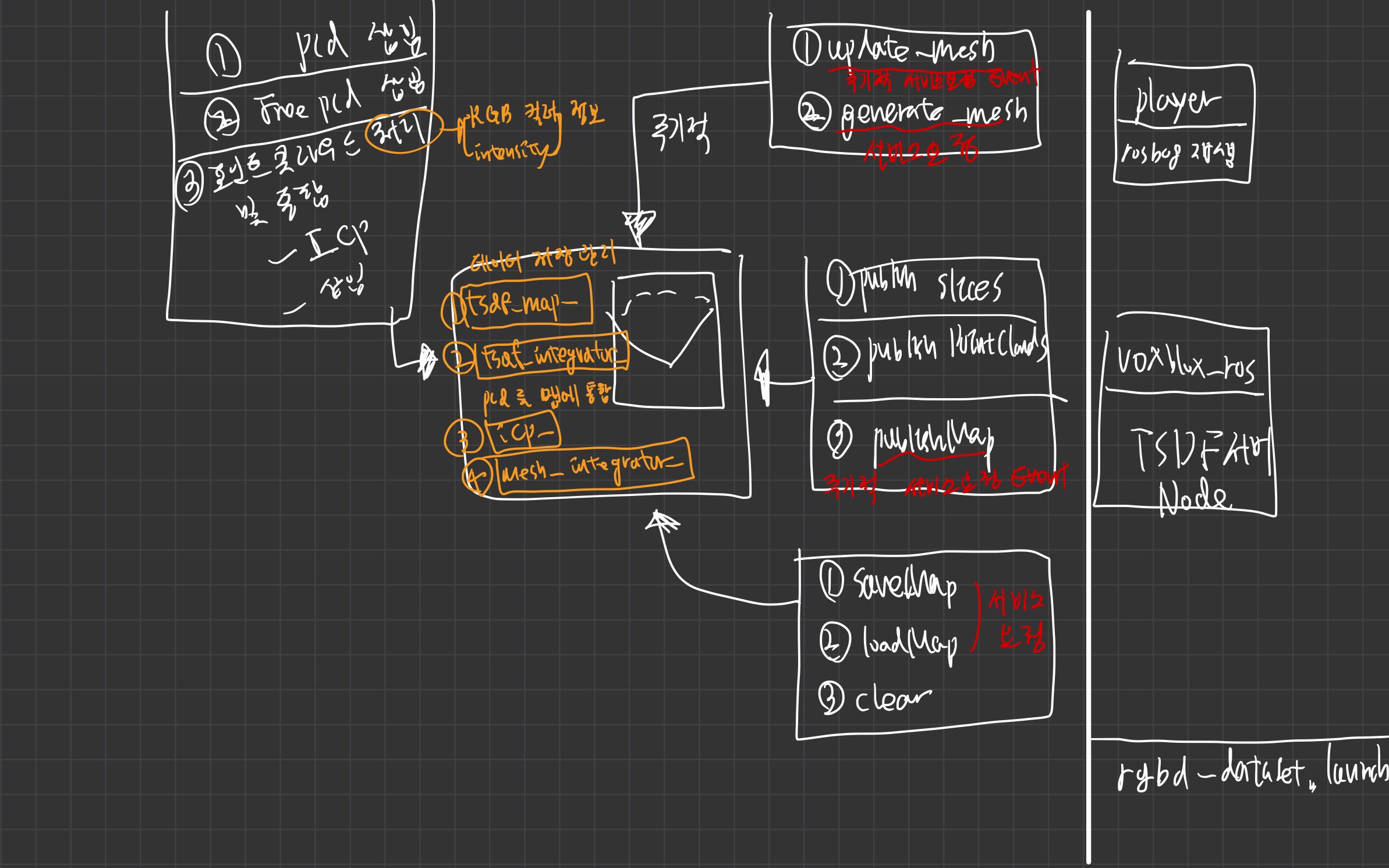
TsdfServer클래스는 로봇이 3D 공간을 탐색하면서 수집한 포인트 클라우드 데이터를 처리하여 TSDF 맵을 생성하고,- 이를 기반으로 메쉬를 생성하거나 다른 형태로 시각화할 수 있게 해주는 서버 역할
2. 주요 기능
a. 포인트 클라우드 데이터 처리
-
포인트 클라우드 삽입 (
insertPointcloud함수):- 로봇의 센서에서 수집된 포인트 클라우드 데이터를 TSDF 맵에 삽입
- 이 데이터는 로봇이 주변 환경을 이해하고, 맵을 생성하는 데 사용
-
자유 공간 포인트 클라우드 삽입 (
insertFreespacePointcloud함수):- 포인트 클라우드 중 자유 공간(즉, 장애물이 없는 공간)을 나타내는 데이터를 처리하여, TSDF 맵에 삽입
- 이 정보는 로봇이 장애물을 피하는 데 유용
-
포인트 클라우드 처리 및 통합 (
processPointCloudMessageAndInsert함수):- 수신된 포인트 클라우드 데이터를 TSDF 맵에 통합하는 핵심 로직을 담당
- ICP(Iterative Closest Point) 알고리즘을 사용해 포인트 클라우드를 정밀하게 정렬
b. 메쉬 생성 및 퍼블리싱
- 메쉬 생성 및 업데이트 (
updateMesh및generateMesh함수):- TSDF 데이터를 기반으로 3D 메쉬를 생성
- 이 메쉬는 로봇의 환경을 시각적으로 표현하는 데 사용
- 메쉬는 주기적으로 업데이트되며, 이를 통해 실시간으로 로봇의 환경 변화에 대응할 수 있음
- TSDF 데이터를 기반으로 3D 메쉬를 생성
- 메쉬 및 TSDF 데이터 퍼블리싱 (
publishSlices,publishPointclouds,publishMap함수 등):- 생성된 메쉬나 TSDF 데이터를 ROS 토픽을 통해 퍼블리시하여, 다른 시스템에서 사용할 수 있도록 함
- 이를 통해 로봇은 다른 장치나 시스템과 데이터를 공유할 수 있음
c. 맵 관리 및 서비스
-
맵 저장 및 불러오기 (
saveMap,loadMap함수):- 현재 TSDF 맵을 파일로 저장하거나, 이전에 저장된 맵을 불러옴
- 이를 통해 로봇은 이전 탐색 데이터를 재사용할 수 있음
-
맵 초기화 (
clear함수):- 현재의 TSDF 맵을 초기화하여, 새로운 환경을 탐색할 준비
-
ROS 서비스 처리:
- 다양한 ROS 서비스를 제공하여, 외부 요청에 따라
- 메쉬를 생성하거나,
- 맵을 저장/불러오는 등의 작업을 수행
- 다양한 ROS 서비스를 제공하여, 외부 요청에 따라
d. 타이머를 통한 주기적 작업
- 주기적 메쉬 업데이트 및 맵 퍼블리싱 (
updateMeshEvent,publishMapEvent함수):- 타이머를 사용해 주기적으로 메쉬를 업데이트하거나 맵을 퍼블리시하는 작업을 수행
3. 클래스 내부 변수
- TSDF 맵 및 통합기:
- 2가지가 정의되어 있습니다.
- TSDF 데이터를 저장하고 관리하는
tsdf_map_과, - 포인트 클라우드 데이터를 TSDF 맵에 통합하는
tsdf_integrator_
- TSDF 데이터를 저장하고 관리하는
- 2가지가 정의되어 있습니다.
- ICP 및 메쉬 통합기:
- 포인트 클라우드 데이터를 정밀하게 정렬하는 데 사용되는
icp_와, - TSDF 데이터를 기반으로 메쉬를 생성하는
mesh_integrator_가 포함되어 있음
- 포인트 클라우드 데이터를 정밀하게 정렬하는 데 사용되는
- ROS 관련 핸들 및 퍼블리셔/서브스크라이버:
- ROS 노드 핸들(
nh_,nh_private_), 퍼블리셔, 서브스크라이버 등이 정의되어 있어, ROS 환경에서 데이터를 송수신할 수 있습니다.
- ROS 노드 핸들(
4. 접근자 및 설정자 함수
-
TSDF 맵 접근자 (
getTsdfMapPtr함수):- 현재의 TSDF 맵을 접근할 수 있는 함수를 제공
-
설정 관련 함수:
- 메쉬 생성 시 사용할 컬러 맵, 슬라이스 레벨,
월드 프레임 등의 설정을 조정할 수 있는 함수들이 포함되어 있음
- 메쉬 생성 시 사용할 컬러 맵, 슬라이스 레벨,
2. tsdf_server.cc
1. TSDF 서버 초기화
- 이 코드는
TsdfServer클래스 초기화- TSDF 맵
- 포인트 클라우드 통합기
- 메쉬 생성기
- ICP(Iterative Closest Point) 정렬기
- ROS 노드 핸들을 통해 파라미터를 가져와 서버의 동작 방식을 설정
- 예를 들어, 아래의 설정이 이뤄짐
어떤 메소드로 TSDF를 통합할지어떤 컬러맵을 사용할지
- 예를 들어, 아래의 설정이 이뤄짐
- 다양한 ROS 토픽과 서비스를 publsih하여 다른 노드와의 통신을 가능하게 함
- 예를 들어, 포인트 클라우드를 받아들이거나, TSDF 맵을 퍼블리시하는 등의 역할
2. 포인트 클라우드 데이터 처리
- 서버는 3D 센서에서 수신된 포인트 클라우드 데이터를 받아들여 TSDF 맵에 통합
- 포인트 클라우드 변환:
- 센서에서 받은 포인트 클라우드를 내부적으로 사용하기 적합한 형태로 변환
- 여기서 RGB 컬러 정보나 강도(intensity) 정보를 처리
- 센서에서 받은 포인트 클라우드를 내부적으로 사용하기 적합한 형태로 변환
- ICP 정렬:
- 옵션에 따라 ICP 알고리즘을 사용해 포인트 클라우드를 정밀하게 정렬할 수 있음
- ICP는 주어진 포인트 클라우드를 기존의 TSDF 맵과 정렬하여 오차를 최소화하는 변환을 계산
- 이를 통해 로봇의 위치 추정을 더욱 정확하게 할 수 있음
- TSDF 통합:
- 변환된 포인트 클라우드는 TSDF 맵에 통합
- 통합된 결과는 3D 공간의 표면을 보다 정확하게 표현
3. 메쉬 생성 및 퍼블리싱
- TSDF 맵에서 데이터를 기반으로 메쉬를 생성하고, 이를 ROS 토픽으로 퍼블리시
- 메쉬 생성:
- TSDF 데이터를 기반으로 3D 메쉬를 생성
- 이 메쉬는 3D 환경을 시각화하거나 다른 작업에 사용할 수 있음
- 메쉬는 주기적으로 업데이트되며, 필요에 따라 결과를 저장할 수도 있음
- 메쉬 퍼블리싱:
- 생성된 메쉬는 ROS 토픽을 통해 퍼블리시되어 다른 시스템에서 사용할 수 있도록 함
4. 지도 관리 기능
- 서버는 TSDF 맵을 저장하고 불러오거나, 현재 맵을 초기화하는 등의 기능을 제공
- 맵 저장 및 불러오기:
- TSDF 맵을 파일로 저장하거나, 이전에 저장된 맵을 불러올 수 있음
- 이를 통해 로봇이 이전에 탐색한 공간의 맵을 복원하거나, 새로운 탐색을 시작할 수 있음
- 맵 초기화:
- 현재의 TSDF 맵을 초기화하여 새로운 탐색을 시작할 수 있음
5. 타이머를 통한 주기적 작업
- 코드는 타이머를 사용해 주기적으로 메쉬를 업데이트하거나 맵을 퍼블리시하는 작업을 수행
- 메쉬 업데이트:
- 일정 시간 간격으로 TSDF 맵을 기반으로 메쉬를 재생성하여 최신 상태를 반영
- 맵 퍼블리싱:
- 일정 간격으로 TSDF 맵을 퍼블리시하여 다른 시스템과 맵 정보를 공유
6. 에러 처리 및 로그 출력
- 코드는 여러 에러 조건을 체크하고, 상황에 따라 ROS 로그를 통해 정보를 출력합니다.
- 이는 디버깅 및 시스템 상태를 모니터링하는 데 중요한 역할을 합니다.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.