[Reconstruction] hydra code - src/reconstruction/projective_integrator.cpp
0
lifelong scene graph
목록 보기
6/56
1. 생성자와 updateMap
요약:
ProjectiveIntegrator클래스는 3D 맵을 업데이트하는 데 사용- 센서로부터 받은 데이터를 기반으로,
- 특정 시야 내에서 블록을 선택하고
- TSDF 및 의미론적 데이터를 반영하여 맵을 갱신
1. ProjectiveIntegrator::ProjectiveIntegrator 생성자
구성요소 설명:
interpolator_(config::create<ProjectionInterpolator>(config.interp_method)):interpolator_는ProjectionInterpolator객체로,- 주어진
config.interp_method에 따라 생성됩니다. (기본값: adaptive)
- 주어진
- 이 객체는 주어진 좌표(예: 센서로부터 포인트까지의 거리)에서의 값을 추정(보간)하는 데 사용
semantic_integrator_(config.semantic_integrator.create()):semantic_integrator_는semantic_integrator객체를 설정값에 따라 생성
2. ProjectiveIntegrator::updateMap 함수
- 이 함수는 3D 맵(
VolumetricMap)을 업데이트하는 역할을 하며, - 입력 데이터(
InputData)를 기반으로 TSDF(Truncated Signed Distance Function) 및 기타 정보를 갱신
매개변수 설명:
const InputData& data: 입력 데이터로, 3D 맵을 업데이트하기 위한 센서 정보 및 이미지 데이터를 포함VolumetricMap& map: 갱신될 3D 맵bool allocate_blocks: (기본값 True)- 새로운 블록을 할당할지 여부를 결정하는 플래그
- 만약
true이면, 새로운 블록(데이터 블록)을 생성해 TSDF 맵에 추가
함수 흐름:
-
auto& tsdf = map.getTsdfLayer();: -
블록 할당 (센서의 가시 범위 내 블록 찾기):
const auto body_T_sensor = data.getSensorPose().cast<float>(); const auto block_indices = findBlocksInViewFrustum( data.getSensor(), body_T_sensor, map.blockSize(), data.min_range, data.max_range);body_T_sensor: 센서의 좌표 변환 행렬을 얻습니다. 이를 통해 센서의 위치와 방향을 결정합니다.findBlocksInViewFrustum: 주어진 센서의 위치와 시야를 기준으로, 해당 시야 내에 포함되는 3D 맵의 블록(공간적 단위)을 찾습니다.block_indices는 이러한 블록들의 인덱스를 저장합니다.
-
새로운 블록 할당:
BlockIndices new_blocks; if (allocate_blocks) { new_blocks = map.allocateBlocks(block_indices); }- 설명:
- 만약 새로운 블록을 할당해야 하는 경우(
allocate_blocks == true), 해당 블록들을 3D 맵에 할당합니다. - 새로 할당된 블록들의 인덱스는
new_blocks에 저장됩니다.
- 만약 새로운 블록을 할당해야 하는 경우(
- 설명:
-
블록 업데이트:
updateBlocks(block_indices, data, map);- 설명: 블록들을 업데이트합니다.
-
업데이트되지 않은 블록 제거:
for (const auto& idx : new_blocks) { if (!tsdf.getBlock(idx).updated) { map.removeBlock(idx); } }- 설명: 할당된 블록 중 업데이트되지 않은 블록들을 맵에서 제거합니다.
3. updateBlocks
요약:
updateBlocks함수는- 주어진 블록 인덱스 리스트를 병렬로 처리하여 성능을 최적화
- 각 스레드는 블록 인덱스를 가져와 개별 블록을 업데이트하는 작업을 수행
updateBlock함수- 특정 블록 내의 모든 복셀을 순회하며, 각 복셀에 대해 SDF(표면 거리) 및 색상, 의미론적 정보를 갱신
2. updateBlock 함수
역할:
- 개별 블록(
block_index)의 모든 복셀을 업데이트
주요 흐름:
-
BlockTuple blocks = map.getBlock(block_index);:block_index에 해당하는 블록을 가져옵니다.
-
복셀 업데이트 준비:
const auto sensor_T_body = data.getSensorPose().cast<float>().inverse();sensor_T_body는 센서가 측정한 데이터의 좌표 변환 행렬입니다. 이를 통해 복셀의 좌표를 센서의 좌표계로 변환할 수 있습니다.- 3D 공간에서 복셀의 위치를 센서의 위치에 맞게 변환하여, 복셀을 기반으로 한 거리 및 다른 계산을 수행합니다.
-
복셀 업데이트 루프:
for (size_t i = 0; i < blocks.tsdf->numVoxels(); ++i) { const auto p_sensor = sensor_T_body * blocks.tsdf->getVoxelPosition(i); const auto measurement = getVoxelMeasurement(p_sensor, data, truncation_distance, voxel_size); if (!measurement.valid) { continue; } auto voxels = blocks.getVoxels(i); updateVoxel(data, measurement, truncation_distance, voxels); was_updated = true; }- 복셀 순회:
- 각 블록의 모든 복셀에 대해 순회합니다.
blocks.tsdf->numVoxels()는 해당 블록 내에 있는 복셀의 개수를 반환하며, 각 복셀의 좌표는blocks.tsdf->getVoxelPosition(i)를 통해 얻습니다.
- 좌표 변환:
sensor_T_body * blocks.tsdf->getVoxelPosition(i)는 복셀의 좌표를 센서 좌표계로 변환합니다. 이렇게 변환된 좌표는 센서가 바라보는 방향에 맞추어 계산됩니다. - 측정값 계산:
getVoxelMeasurement함수는 해당 복셀에 대한 SDF(서피스와의 거리)를 계산하고, 그 값이 유효한지 여부를 판단합니다. - 복셀 업데이트: 만약 측정값이 유효하면,
updateVoxel함수가 해당 복셀의 값을 갱신합니다. 이 함수는 TSDF 및 색상, 의미론적 데이터를 갱신합니다. was_updated플래그: 복셀이 업데이트되면was_updated가true로 설정됩니다. 이는 해당 블록이 적어도 한 번은 업데이트되었음을 의미합니다.
- 복셀 순회:
-
블록 업데이트 플래그 설정:
if (was_updated) { blocks.tsdf->setUpdated(); }- 블록이 업데이트되었으면, 해당 블록을 "업데이트됨"으로 표시합니다. 이 플래그는 나중에 블록의 상태를 추적하는 데 사용됩니다.
updateVoxel 함수
updateVoxel함수는 특정 복셀(voxel)의 데이터를 -> 센서로부터 받은 새로운 측정값에 기반하여 갱신- SDF, 색상 정보 및 의미론적(semantic) 데이터까지 통합하는 작업을 수행
요약:
- 유효한 측정값(SDF) 확인:
- SDF 값이 유효한지 확인한 후, 유효하지 않으면 복셀을 갱신하지 않습니다.
- 가중치와 TSDF 거리 갱신:
- 새로운 측정값을 복셀의 기존 가중치 및 거리 값과 융합하여 복셀의 상태를 갱신
- 색상 및 의미론적 데이터 통합:
- 복셀에 대한 색상 및 의미론적 데이터를, 해당 정보가 존재할 경우 융합
- 이를 통해 복셀은 3D 맵에서 더 구체적이고 다양한 정보를 가지게 됨
2. 기존 가중치와 새로운 가중치의 융합:
auto& tsdf_voxel = *voxels.tsdf;
const auto prev_weight = tsdf_voxel.weight;
tsdf_voxel.weight =
std::min(tsdf_voxel.weight + measurement.weight, config.max_weight);tsdf_voxel: 이 복셀의 TSDF 데이터를 가리킵니다.prev_weight: 이 복셀의 기존 가중치(weight)입니다. TSDF 값은 여러 센서 측정값이 융합되기 때문에, 각 측정값에 가중치가 부여됩니다.- 가중치 갱신:
- 새로운 측정값(
measurement.weight)을 기존 가중치에 더하여 복셀의 가중치를 갱신합니다. - 다만, 가중치의 합이
config.max_weight를 넘지 않도록 제한합니다. (10000) - 이를 통해 가중치가 지나치게 커져서 새로운 측정값이 반영되지 않는 상황을 방지합니다.
- 새로운 측정값(
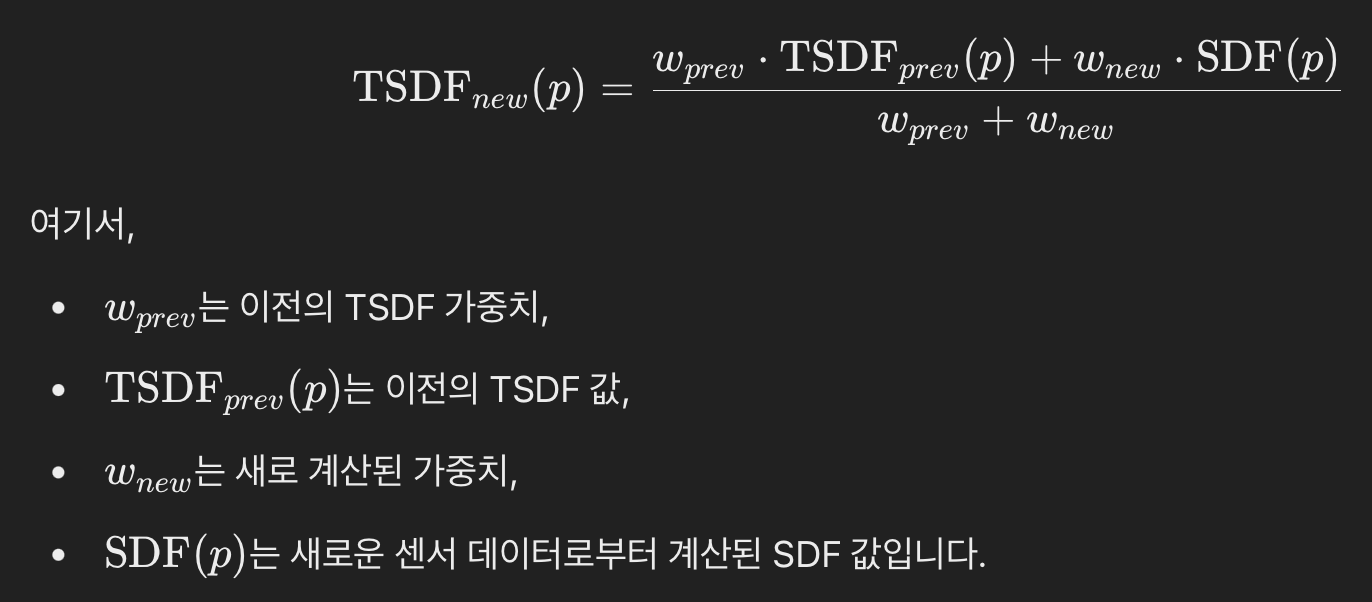
3. TSDF 거리 갱신:
tsdf_voxel.distance =
(tsdf_voxel.distance * prev_weight + measurement.sdf * measurement.weight) /
(prev_weight + measurement.weight);- 이 부분은 가중 평균법(weighted averaging)을 사용하여 복셀의 TSDF 값을 갱신하는 부분입니다.
- 기존 TSDF 값(
tsdf_voxel.distance)에 기존 가중치(prev_weight)를 곱하고, - 새로 측정된 SDF 값(
measurement.sdf)에 새 가중치(measurement.weight)를 곱한 후, - 두 값을 더하여 총 가중치로 나누어 새로운 TSDF 값을 계산합니다.
- 기존 TSDF 값(
- 이를 통해 이전의 측정값과 새로운 측정값이 균형 있게 반영됩니다.
4. 추적 정보 갱신:
if (voxels.tracking) {
voxels.tracking->last_observed = data.timestamp_ns;
}- 추적 정보 갱신: 만약 복셀에 대한 추적 정보(
tracking)가 있다면, 해당 복셀이 마지막으로 관측된 시간을 현재 데이터의 타임스탬프(data.timestamp_ns)로 갱신합니다. - 이 기능은 복셀의 최신성을 추적하는 데 사용되며, 오래된 복셀을 처리하거나 갱신할 때 도움이 될 수 있습니다.
5. 표면과의 거리 확인:
if (measurement.sdf >= truncation_distance) {
return;
}measurement.sdf: 해당 복셀이 표면에서 얼마나 떨어져 있는지 나타내는 값입니다.- (매우 중요) 만약 이 값이
truncation_distance이상이라면, 복셀이 표면에서 너무 멀리 떨어져 있기 때문에 다른 데이터(예: 색상, 의미론적 정보)를 갱신할 필요가 없습니다. 이 경우 함수는 종료됩니다.
6. 색상 데이터 갱신:
if (!data.color_image.empty()) {
const auto color = interpolator_->interpolateColor(
data.color_image, measurement.interpolation_weights);
const float ratio = measurement.weight / (tsdf_voxel.weight + measurement.weight);
tsdf_voxel.color.merge(color, ratio);
}- 색상 데이터:
- 만약 입력 데이터(
data.color_image)에 색상 정보가 포함되어 있다면, 해당 색상 데이터를 복셀의 TSDF에 통합
- 만약 입력 데이터(
- 색상 보간(interpolation):
- 복셀의 위치를 기준으로 색상을 보간(interpolation)하여 복셀의 색상 값을 추정
interpolation_weights는 복셀의 위치를 기반으로 주변 색상 값을 참조하는 가중치
- 색상 융합: 복셀의 기존 색상과 새로운 색상을 가중 평균 방식으로 융합합니다. 새로운 측정값이 더 많이 반영될 수 있도록 측정값의 가중치(
measurement.weight)에 기반한 비율(ratio)을 계산하고 이를 색상에 반영합니다.
7. 의미론적 데이터 갱신:
if (!semantic_integrator_ || !voxels.semantic) {
return;
}
if (semantic_integrator_->isValidLabel(measurement.label)) {
semantic_integrator_->updateLikelihoods(measurement.label, *voxels.semantic);
}- 유효한 레이블 확인:
measurement.label이 유효한 레이블인지 확인합니다. - 의미론적 레이블 융합: 유효한 레이블인 경우,
semantic_integrator_는 해당 복셀의 의미론적 레이블을 갱신합니다.- 이는 복셀에 대한 의미론적 클래스(예: 사람, 건물, 도로 등)를 추정하는 데 사용됩니다.
- https://velog.io/@jk01019/hydra-code-srcreconstructionsemanticintegrator.cpp
4. 핵심 수학적 원리
4.1 TSDF 업데이트
- TSDF는 현재 센서 데이터에 의해 계산된 새로운 거리를 이전 TSDF 값과 가중합 (weighted averaging)하여 업데이트합니다.
- 이때 새로운 TSDF 값은 다음과 같이 계산됩니다:
4.2 SDF 계산
float ProjectiveIntegrator::computeSDF(const InputData& data, const InterpolationWeights& weights, const float truncation_distance, const float distance_to_voxel) const;SDF는 센서로부터 voxel까지의 거리를 측정하여 표면과의 거리를 계산합니다. 이때 SDF 값은 표면에서의 거리 차이로 정의됩니다:
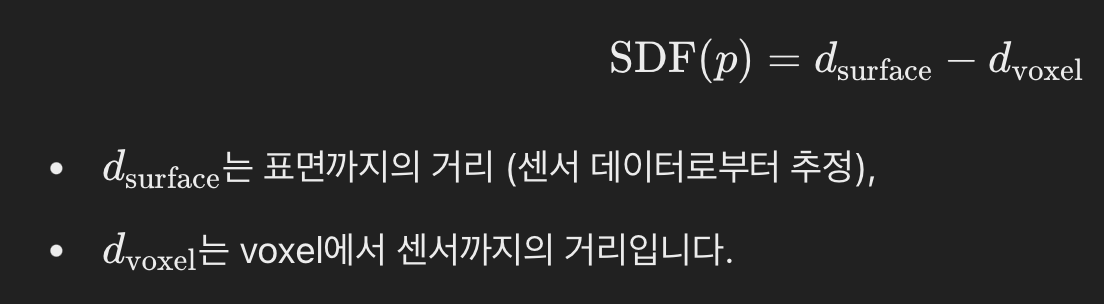
이를 통해 해당 voxel이 표면에 가까운지 또는 표면 외부에 있는지를 결정하게 됩니다.
4.3 가중치 계산
float ProjectiveIntegrator::computeWeight(const Sensor& sensor, const Point& p_C, const float sdf, const float truncation_distance, const float voxel_size) const;- 가중치는 센서의 센서 노이즈 모델에 따라 다르게 적용됩니다.
- 가까운 거리에서는 높은 가중치를, 먼 거리에서는 낮은 가중치를 부여하여, 데이터의 정확도를 반영합니다.
- 이 과정에서 가중치는 거리의 제곱에 반비례하여 감소합니다:
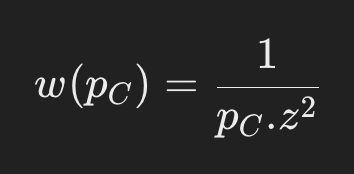
- 이는 거리가 멀수록 데이터의 신뢰도가 낮아짐을 반영한 계산입니다.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.