링크
https://www.acmicpc.net/problem/17396
문제
유섭이는 무척이나 게으르다. 오늘도 할 일을 모두 미뤄둔 채 열심히 롤을 하던 유섭이는 오늘까지 문제를 내야 한다는 사실을 깨달았다. 그러나 게임은 시작되었고 지는 걸 무척이나 싫어하는 유섭이는 어쩔 수 없이 백도어를 해 게임을 최대한 빠르게 끝내기로 결심하였다.
최대한 빨리 게임을 끝내고 문제를 출제해야 하기 때문에 유섭이는 최대한 빨리 넥서스가 있는 곳으로 달려가려고 한다. 유섭이의 챔피언은 총 N개의 분기점에 위치할 수 있다. 0번째 분기점은 현재 유섭이의 챔피언이 있는 곳을, N-1 번째 분기점은 상대편 넥서스를 의미하며 나머지 1, 2, ..., N-2번째 분기점은 중간 거점들이다. 그러나 유섭이의 챔피언이 모든 분기점을 지나칠 수 있는 것은 아니다. 백도어의 핵심은 안 들키고 살금살금 가는 것이기 때문에 적 챔피언 혹은 적 와드(시야를 밝혀주는 토템), 미니언, 포탑 등 상대의 시야에 걸리는 곳은 지나칠 수 없다.
입력으로 각 분기점을 지나칠 수 있는지에 대한 여부와 각 분기점에서 다른 분기점으로 가는데 걸리는 시간이 주어졌을 때, 유섭이가 현재 위치에서 넥서스까지 갈 수 있는 최소 시간을 구하여라.
입력
첫 번째 줄에 분기점의 수와 분기점들을 잇는 길의 수를 의미하는 두 자연수 N과 M이 공백으로 구분되어 주어진다.(1 ≤ N ≤ 100,000, 1 ≤ M ≤ 300,000)
두 번째 줄에 각 분기점이 적의 시야에 보이는지를 의미하는 N개의 정수 a0, a1, ..., aN-1가 공백으로 구분되어 주어진다. ai가 0이면 i 번째 분기점이 상대의 시야에 보이지 않는다는 뜻이며, 1이면 보인다는 뜻이다. 추가적으로 a0 = 0, aN-1 = 1이다., N-1번째 분기점은 상대 넥서스이기 때문에 어쩔 수 없이 상대의 시야에 보이게 되며, 또 유일하게 상대 시야에 보이면서 갈 수 있는 곳이다.
다음 M개의 줄에 걸쳐 세 정수 a, b, t가 공백으로 구분되어 주어진다. (0 ≤ a, b < N, a ≠ b, 1 ≤ t ≤ 100,000) 이는 a번째 분기점과 b번째 분기점 사이를 지나는데 t만큼의 시간이 걸리는 것을 의미한다. 연결은 양방향이며, 한 분기점에서 다른 분기점으로 가는 간선은 최대 1개 존재한다.
출력
첫 번째 줄에 유섭이의 챔피언이 상대 넥서스까지 안 들키고 가는데 걸리는 최소 시간을 출력한다. 만약 상대 넥서스까지 갈 수 없으면 -1을 출력한다.
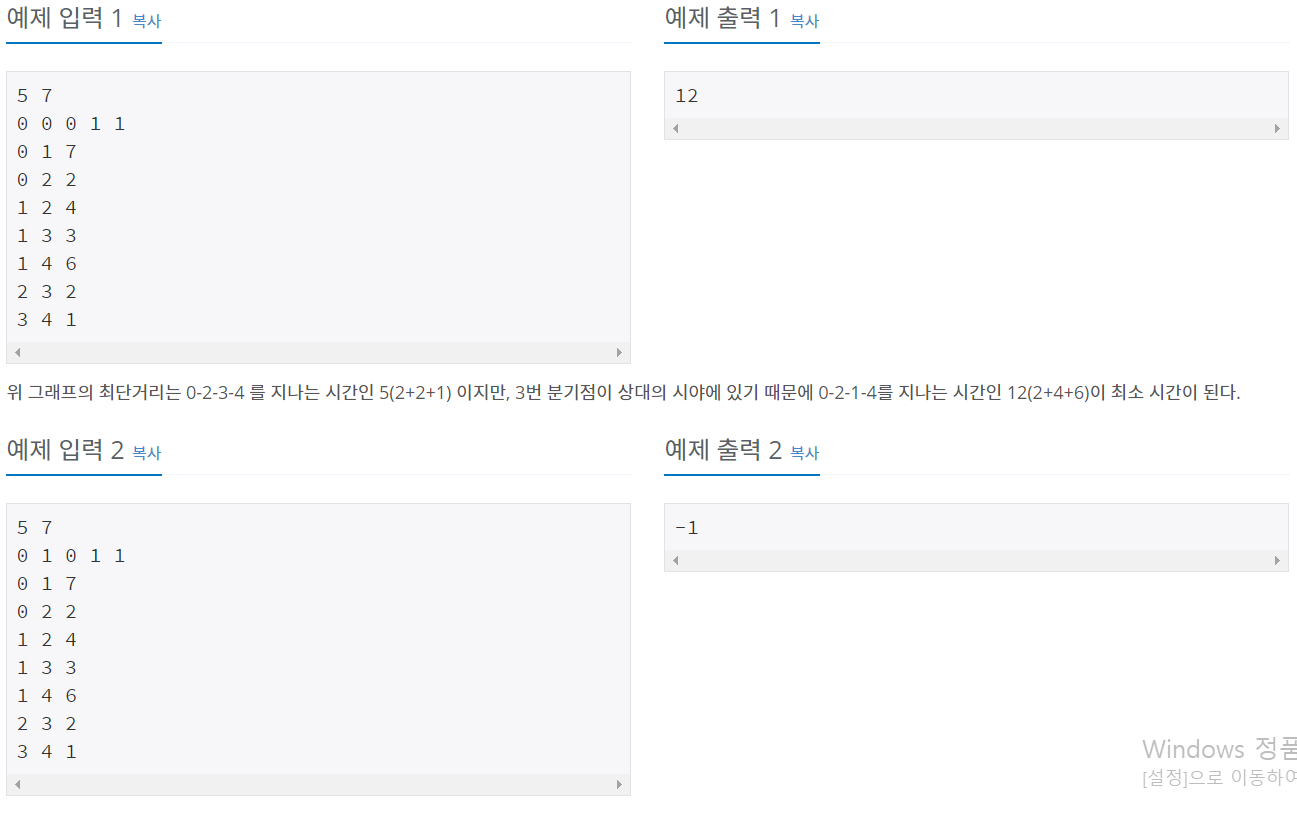
예제 입력 및 출력
풀이 코드(C++)
#include <bits/stdc++.h>
#define X first
#define Y second
#define pb push_back
#define sz(a) int((a).size())
#define fastio ios::sync_with_stdio(0), cin.tie(0), cout.tie(0)
#define MAX(a, b) (((a) > (b)) ? (a) : (b))
using namespace std;
using ll = long long;
using ull = unsigned long long;
using dbl = double;
using ldb = long double;
using pii = pair<int,int>;
using pll = pair<ll,ll>;
using vi = vector<int>;
using wector = vector<vector<int>>;
using tiii = tuple<int,int,int>;
const ll INF = ll(1e18) + 1;
vector<pll> adj[100001];
vector<ll> dist(100001,INF);
int n,m;
ll sight[100001];
void dijkstra(ll start){
priority_queue<pll,vector<pll>,greater<pll>> PQ;
PQ.push(make_pair(0,start));
dist[start] = 0;
while(!PQ.empty()){
ll weight = PQ.top().first;
auto cur = PQ.top().second;
PQ.pop();
if(dist[cur] < weight) continue;
for(auto i = 0; i < adj[cur].size(); i++){
auto next = adj[cur][i].second;
ll nextWeight = adj[cur][i].first;
if(dist[next] > nextWeight + weight){
dist[next] = nextWeight + weight;
PQ.push(make_pair(dist[next], next));
}
}
}
}
int main(){
fastio;
cin >> n >> m;
for(int i = 0; i < n; i++) cin >> sight[i];
for(int i = 0; i < m; i++){
int a,b,c; cin >> a >> b >> c;
if(sight[a] || sight[b]){
if(a != n - 1 && b != n - 1) continue;
}
adj[a].pb({c, b});
adj[b].pb({c, a});
}
dijkstra(0);
cout << (dist[n - 1]==INF ? -1 : dist[n - 1]) << "\n";
return 0;
}분기점이 적의 시야에 보이면 연결을 아예 하지 않으면 되는데 맨 마지막 정점은 무조건 연결해줘야 하는 것에 주의를 하며 입력을 받고 다익스트라 탐색을 진행하면 된다.
int 오버플로우에 주의
