1. 작성 이유
: 자율주행차량에서 빠르고 정확한 도로 인지는 중요한 파트이다. Lidar만을 이용한 도로 인지 알고리즘은 낮과 밤 모두 가능하지만 최첨단의 것과 비교하면 정확도에서 큰 차이를 보인다. Camera만을 이용한 조명과 날씨에 영향을 받는다. Lidar, Camera fusion 기반 알고리즘 또한 여전히 온종일 작동하지 못한다. 따라서, 좋은 성능을 보여주는 Road Detection 알고리즘이 필요하다.
2. 과정
: sensor의 사용 유형에 따라 세가지 카테고리로 나눠보면 첫번째, 오직 카메라만 사용하는 경우. 두번째, 오직 Lidar만 사용하는 경우, 세번째, Lidar와 Camera fusion을 사용하는 경우가 있다. 카메라만 사용하는 경우에는 가격이 싸고, 높은 frame rate를 갖지만, 빛과 날씨에 영향을 받고 낮에만 작동이 가능하다. Lidar만 사용하는 경우에는 빛과 날씨라는 변수에 영향을 받지 않고, 꽤 정확한 치수를 온종일 가지지만, 실제 성능을 비교하면 카메라만 사용하는 경우보다 나쁘다. Camera-Lidar fusion의 경우 카메라와 라이다가 다르기때문에 알고리즘이 복잡하다는 단점이 있다.
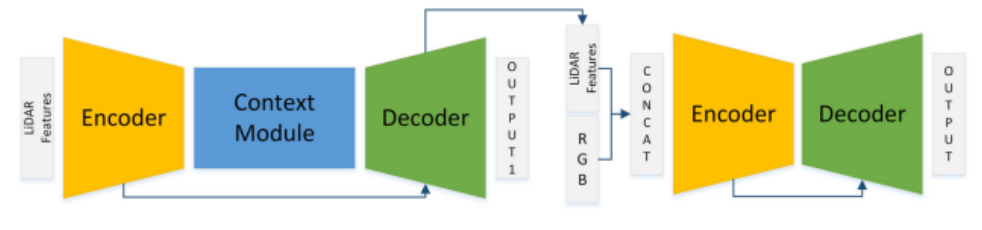
따라, 본 논문에서는 cascaded LiDAR-Camera Fusion Network를 제안한다. 이는 온종일 도로 인지가 가능하고, 높은 정확도를 가진다. cascaded LiDAR-Camera Fusion Network의 CNN은 총 세가지 과정으로 아래와 같다.
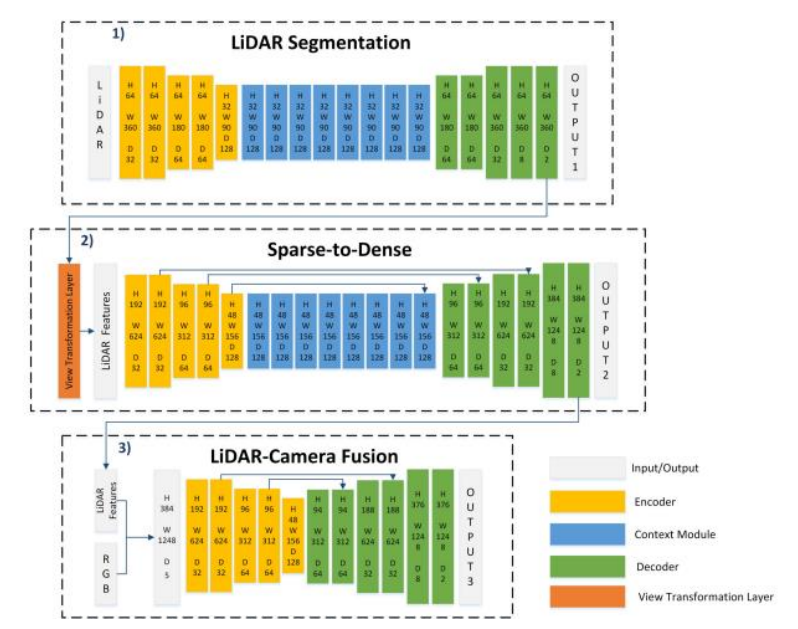
cascaded LiDAR-Camera Fusion Network 실행 과정은 첫번째, LiDAR segmentation Fusion
Module, 두번째, Sparse-to-dense Fusion Module, 세번째, LiDAR-Camera Fusion Module이다. 이는 연쇄적으로 진행되면서 도로를 인지한다. 마지막 과정인 LiDAR-Camera Fusion Module에서는 LiDAR data만을 이용하여 도로의 면적을 추정한다. 그리고 두번째로, Camera를 이용해 정확하게 도로를 인지한다.
3. 결론
: KITTI-ROAD TESTING DATASET(BEV)를 이용해 실험한 결과, Early, Middle, Lat, Cross Fusion보다 더 좋은 성능을 보였고, LiDAR-only, LiDAR-camera(LiDAR) 알고리즘과 비교했을 때도 더 좋은 성능을 보였다