해당 시리즈는 LG에서 지원하는 LG Aimers의 교육 내용을 정리한 것으로, 모든 출처는 https://www.lgaimers.ai/ 입니다.
Radar
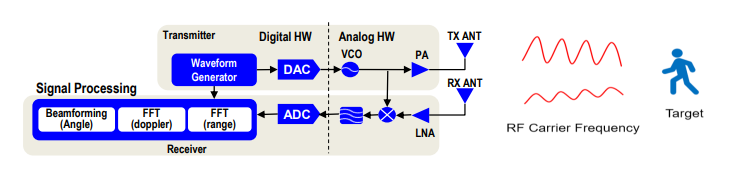
Radar는 Radio Detection And Ranging의 약어이며, Radio Wave를 이용해 사물을 감지하는 기술이다. 레이더의 기본 동작 원리는 송신 전자파 신호와 타겟을 맞고 반사되어 돌아온 수신 전자파 신호의 시간차, ToF와 도플러 주파수 변화량을 이용해 레이더와 상대 물체와의 거리, 속도를 측정하는 것이다.
군사용 레이더는 기존의 사격통제 장치에서 10GB hz의 엑스밴드 주파수를 사용하고 있었지만, 점차 주파수 범위를 높고 낮게 사용하는 기술로 발전했다.
IoT 레이더는 주로 24GB, 60GB 주파수를 사용한 보안용 침입감지, 독거노인 움직임, 심호흡 감지, 낙상감지, 재실감지 등 헬스커어용으로 사용한다.
자동차용 레이더는 주로 77GB ~ 79GB의 주파수를 사용하고 있고, 최근 카메라 라이다 등과 함께 자율주행의 핵심 부품으로 자리 잡았다.
ADAS용 레이더 : 차량 앞과 뒤 범퍼에 설치하여 차량, 보행자, 도로 인프라를 인식하는 방식을 사용한다.
거리 측정
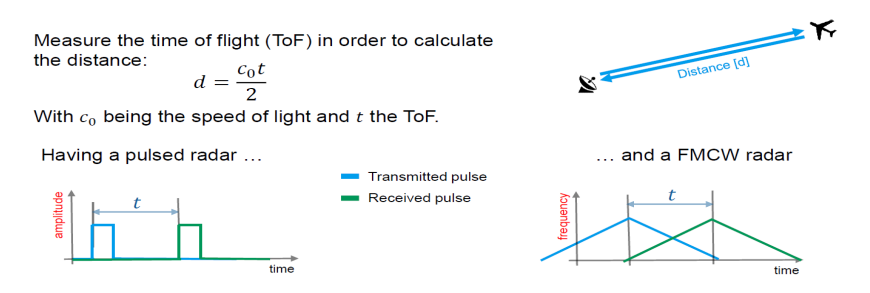
신호가 반사되는 시간이 길면, 상대물이 멀리 떨어져 있는 것이다.
레이더는 송신 신호의 변조 방식에 따라 구형파(Pulsed Radar), 연속적 삼각파(FMCW Radar)로 나뉜다.
FMCW : Frequency Modulated Continuous Wave: 차량용 레이더가 주로 사용하는 주파수로, 시간에 따라 선형적으로 변하는 삼각파 형태의Chrip신호를 보내고, 상대물에 반사되어 돌아오는 신호를 받는다.FMCW을 사용하면 이론적으로 사각지대가 없고, 낮은 출력 전력, 낮은 하드웨어 복잡성, 저렴한 제조 비용 때문에 상업용으로 많이 사용한다.
-
Pulsed Radar: 진폭을 높여서 신호를 멀리 보내는 군사용으로 많이 사용한다. 관리 비용 및 기타 비용이 비싸다.
속도 측정
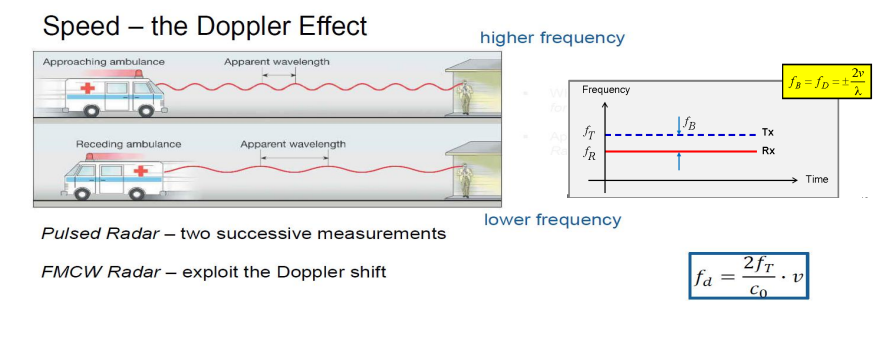
움직이는 상대물에 반사되어 입사되는 신호의 주파수를 분석해보면, 기존에 송신된 주파수와 차이가 발생하는 것을 알 수 있는데, 이것을 도플러 주파수, 도플러 효과라고 한다.
도플러 주파수를 확인하기 위해서는 FMCW 방식을 사용해야 한다. 상대물이 다가오면 주파수가 높아지고, 멀어지면 낮아지게 되는데, 그 크기로 상대 물의 속도를 파악하는 방식이다. 상대물의 속도가 빠를 수록 도플러 주파수는 커진다. 반대로 속도가 늦으면 도플러 주파수는 작다.
각도 측정
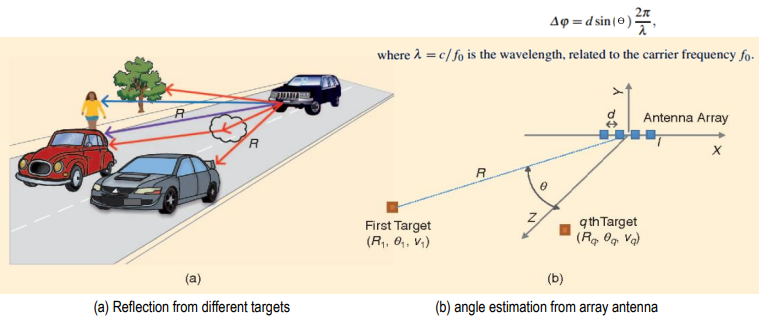
레이더는 Array 안테나로 송수신되는 신호의 위상차를 이용해 상대물의 각도나 위치 정보를 알 수 있다. 레이더 안테나는 주로 Array라고 불리는 배열 구조를 사용하고 있는데, 안테나 배열 수가 많을 수록 빔 폭이 sharp 해지므로, 상대물의 각도 정보를 촘촘히 확인할 수 있고, 이를 각 해상도가 높다고 표현하며 Main Chip에서 지원하는 채널 수가 안테나 Array 수와 같다고 이해하면 된다.
방위각은 여러 개의 송수신 안테나를 사용하여 측정하는데, 각도를 추정하기 위해 레이더는 일반적으로 여러 안테나에서 수신된 신호의 위상차를 측정한다. 적어도 두 개의 수신 안테나로 구성된 균일한 선형 Array를 사용하여 추정할 수 있다.
안테나 요소의 수를 늘리면 방위 분해능이 높아지고, 각도 측정의 정확도가 향상된다. 수식에서 각도는 개별 안테나로 들어오는 위상차인 파이의 관계식으로 설명할 수 있다.
레이더의 핵심 기술은 안테나, mmWave회로, 신호처리, 후처리 판별 알고리즘, PCB 제조공정의 Calibration SW 기술이 중요하다.
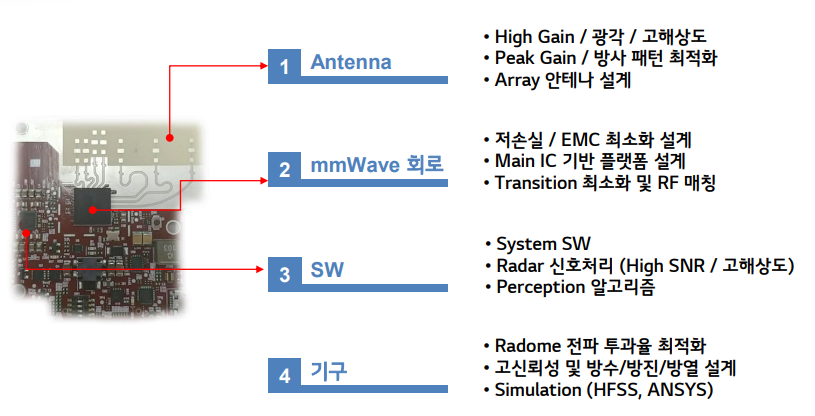
레이더에 사용되는 PCB는 77Ghz 고주파에 둔감하도록 FR4 재질의 PCB 위에 저유전/저손실 테프론 소재를 이종 접합하여 사용한다. 이는 단가가 높아, 원가가 낮은 저유전/저손실 PCB 소재 개발이 필요하다.
최근 4D 이미지 레이더에서는 WaveGuide 구조형 안테나를 설계하여 안테나 채널 수를 최대 192ch 까지 확장했다. 향후에는 여러 개의 chip을 cascading하여 768ch, 3072ch까지 확대가 가능하다.
기존 레이더는 한 개의 MMIC 만을 사용했다고 하면, 최근에는 2개, 4개 이상의 멀티 MMIC를 cascading하여 고해상도 레이더를 구현하고 있다. 이를 위해 Multi-chip 기반 저 손실 회로 설계 및 WaveGuide Coupling 급전 구조 설계가 중요하다.
레이더의 입력 데이터는 레이더 신호처리 기반이지만, Perception SW Algorithm은 영상 처리 소프트웨어 영역에 속한다.
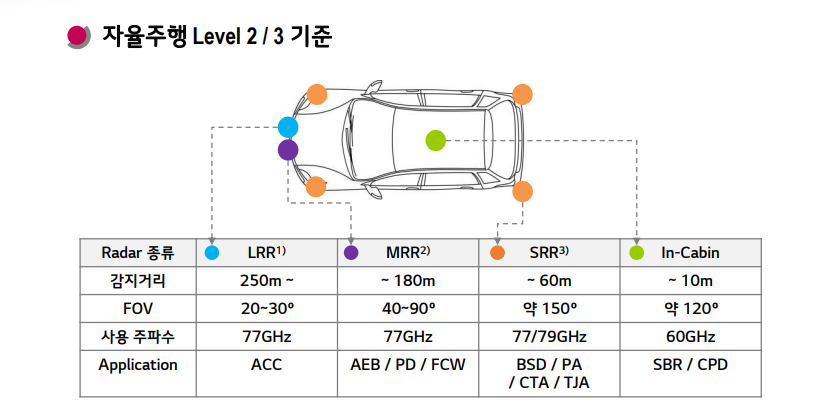
레이더의 종류
-
LRR:Adaptive Cruise Control, 충돌 방지를 위한Automatic Emergency Breaking에 주로 사용하며 주로 고급 차량 위주로 장착하며, 최근에는 신호처리 기술의 발달로 인하여LRR과MRRorMRR과SRR의 하드웨어가 통합되어 구분이 모호해지는 경향이 있다. -
MRR: 충돌 방지를 위한Automatic Emergency Breaking, 전면, 후면 충돌을 경고하는Foward/Backward Collision Warning에 주로 사용 -
SRR: 사각지대 감지, 주차 보조, 후진 시 경고 등에 사용 -
In-Cabin: 차량에 방치된 유아 감지 기능Child Present Detection, 주행 전 벨트 착용 알람을 주는Seatbelt Reminer에 사용하며, 최근에는 차량 절도를 막는Intruder기능에도 사용
레이더 기술 동향
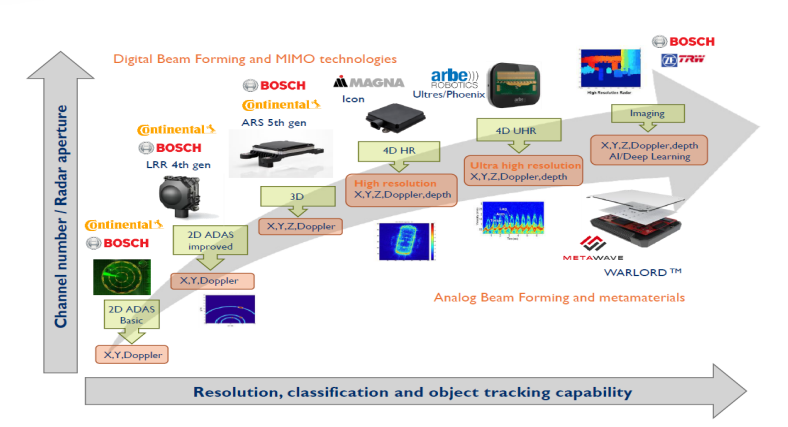
레이더 기술은 2D/3D -> 4D로 진화하고 있다. 차량에 주로 장착되고 있는 2D 레이더는 거리, 속도를 측정하고 3D 레이더는 거리, 속도, 각도의 측정이 가능하다. 4D 레이더는 일명 이미지 레이더 개념으로 거리, 속도, 높이까지 측정하여 사물의 형체까지 확인할 수 있고, 스캐너 개념의 레이더로 초고해상도 센서 수준이다.
레이더 칩셋
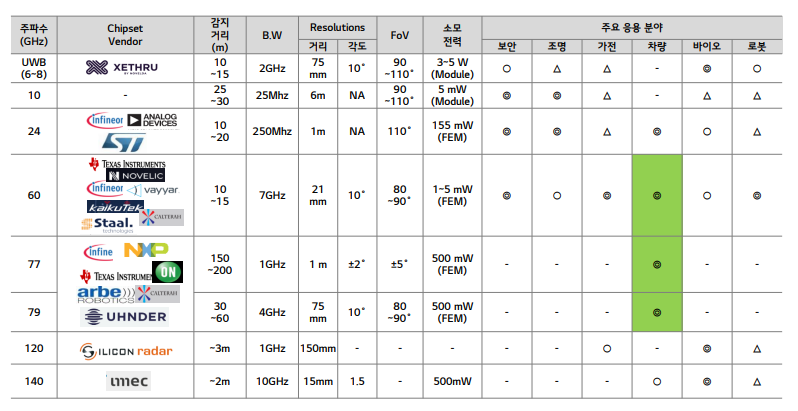
주파수는 10~140Ghz 까지 폭 넓게 사용 가능하고, 응용 분야에 따라 최적의 레이더 대역을 선택하기 위해 솔루션 사전 성능 비교 검토가 필요하다. 차량의 경우 60.77.79Ghz를 사용하며, 보안 조명의 경우 24GHz를 바이오의 경우 10GHz를 사용한다. 가전 로봇의 경우 60GHz를 사용한다.
대부분의 레이더는 아날로그 방식이지만, 디지털 방식을 사용하는 회사도 존재한다. 디지털 레이더 방식은 위상차를 이용해서 -1, +1 암호화된 신호를 보내 신호 간섭에 강하고 물체 2개가 겹쳤을 때 구분이 가능하고, 소모 전류가 낮아 유망하다.
레이더 시장 동향
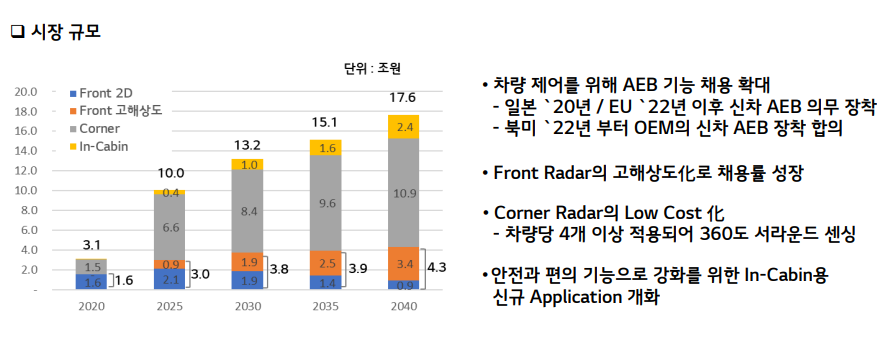
레이더는 Euro NCAP 등 안전 등급 평가 및 국가별 긴급 제동 장치 의무화로 인해 차량 탑재가 지속 증가 중이다. 차량 제어를 위해 AEB (Autonomous Emergency Breaking) 기능 채용 확대, 고성능화로 채용률 성장 중이고, 일본의 경우 2020년 유럽은 2022년 이후 신차에 의무적으로 장착된다.
프론트 레이더는 고해상도화되어 단순 사물 유판단에서 사물의 형상 구분 및 상황 예측까지 성능 발전이 예상된다. 이를 위해 안테나 및 신호처리 소프트웨어 기술 발전으로 사물의 형상 구분이 가능하도록 고해상도화 되어야 한다.
또한, 카메라는 프라이버시 이슈로 레이더가 적용되는 추세다.
