Basic Application
LiDAR는 Point 간 연관성 X
알고리즘 -> 연관성 생성 -> Point 그룹화
ROI Filtering
불필요 데이터 줄이는 기법
가까운 물체 : Resolution
먼 물체 : Resolution
Passthrough filter Voxelization 적용
Ground Plane Removal
지면 검출 시
Dynamic Object는 검출에 불필요
지면보다 높은 Point Cloud 불필요
지면과 비지면 분리를 위한 RANSAC 적용
Object Clustering
Object별 Segment 나누기
기본 Clustering : K-Means DBSCAN
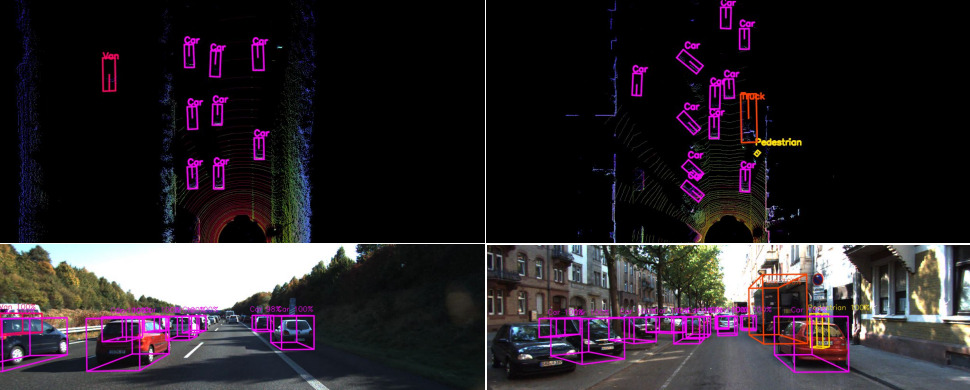
딥러닝 : Complex-YOLO