Warping
영상을 이동, 회전, 크기변환 등을 이용해 이미지를 왜곡하거나 왜곡된 이미지를 복원하기 위한 처리 기법
다양한 이미지 변형 방법
변환 (Transformations)
새로운 좌표()로 변환하는 함수
- 강체변환
크기 각도가 보존되는 변환 - 유사변환
크기는 변하고 각도는 보존되는 변환 - 선형변환
Vector 공간에서의 이동 - Affine
선형변환과 이동변환가지 포함
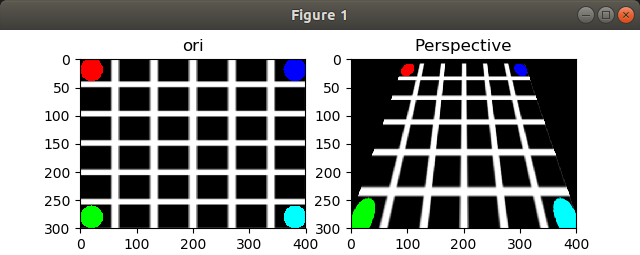
선의 수평성 유지 - Perspective
수평성 유지되지 않음
원근 변환
변환행렬을 사용하는 OpenCV 함수
dst=cv2.warpAffine(src, matrix, dsize, dst, flags, borderMode, borderValue)| src | 원본 이미지 | numpy |
| matrix | 2x3 | 변환행렬 |
| dsize | 결과 이미지 크기 | (width, height) |
| dst | 결과 이미지 | optional |
| flags | 보간법 알고리즘 | optional |
| borderMode | 외곽영역 보정 플래그 | optional |
| borderValue | 외곽영역 보정 플래그 cv2.BORDER_CONSTANT 색상 값 (default=0) | optional |
-
flags
cv2.INTER_LINEAR
cv2.INTER_NEAREST
cv2.INTER_AREA
cv2.INTER_CUBIC -
borderMode
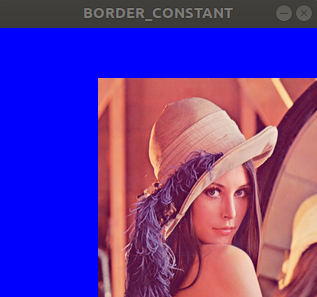
cv2.BORDER_CONSTANT
cv2.BORDER_REPLICATE
cv2.BORDER_WARP
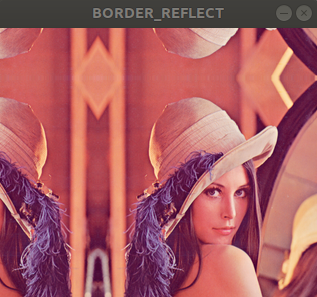
cv2.BORDER_REFLECT
xycar_ws
├ src
│ └ sliding_drive
│ └ src
│ ├ translation.py
│ ├ scaling.py
│ ├ Lenna.png
│ └ chess.png
│
├ build
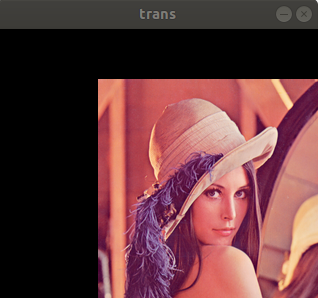
└ develpython translation.py
단순 이동
외곽 픽셀 파란색으로 보정
외곽 픽셀 원본 반사 보정
python scaling.py
보간법 없이 축소

보간법 적용 축소

보간법 없이 확대
보간법 적용 확대

크기 조정 OpenCV 함수
cv2.resize(src, dsize, dst, fx, fy, interpolation)
python resizing.py
| src | 원본 이미지 |
| dsize | 출력 영상 크기, 생략 시 fx,fy 적용 |
| fx,fy | 크기 배율 |
| interpolation | 보간법 알고리즘 선택 플래그 |
| dst | 결과 이미지 |
크기 지정으로 축소

배율 지정으로 축소

회전
python rotation1.py
OpenCV에서는 y축이 반대방향
행렬 3열 : anchor가 원점(왼쪽상단)이므로 회전한 이미지를 중앙으로 이동

python rotation2.py
cv2.getRotationMatrix2D() 사용
0.5배

1.5배

Affine 변환
크기 이동 회전에서 원래 평행 특성 그대로 유지
python affine.py
pts1 pts2
pts1 = np.float32([[50, 50], [200, 50], [50, 200]])
pts2 = np.float32([[10, 100], [200, 50], [100, 250]])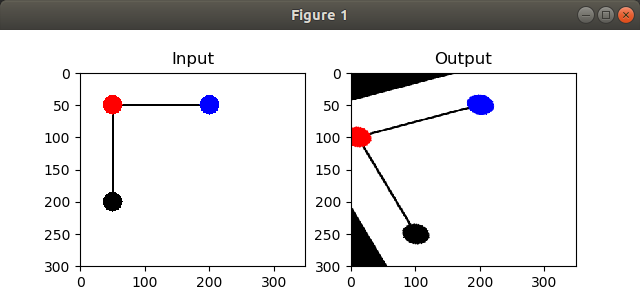
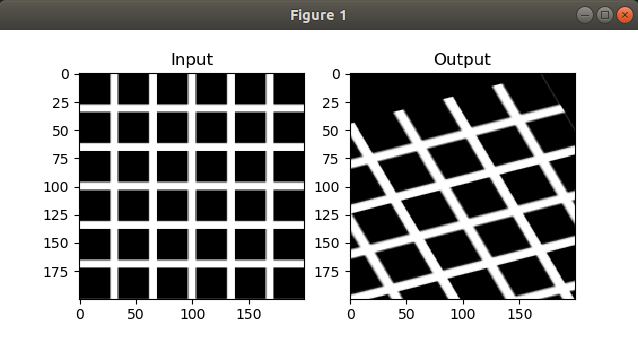
Perspective
python perspective.py
도로 이미지에 대한 영상처리
도로 이미지 Bird Eye View 변형 처리
차선 검출
원본 이미지에 오버레이
