[Devlog] - 자율주행
1.[자율주행] 정지선 인식

이번 자율주행 자동차 제작에서 정지선 인식 소프트웨어 개발 부분을 맡아 진행하기로 하였다.해당 코드를 기준으로 발전을 시키고, 액츄에이터를 사용하여 브레이크를 작동하는 방식으로 진행하기로 하였다.
2.[자율주행] 액츄에이터 작동
https://www.basic4mcu.com/bbs/board.php?bo_table=gac&wr_id=4858&device=mobile액추에이터 구동 코드참고자료https://youtu.be/qJwsCpDa0M4
3.[자율주행] ROS 설치
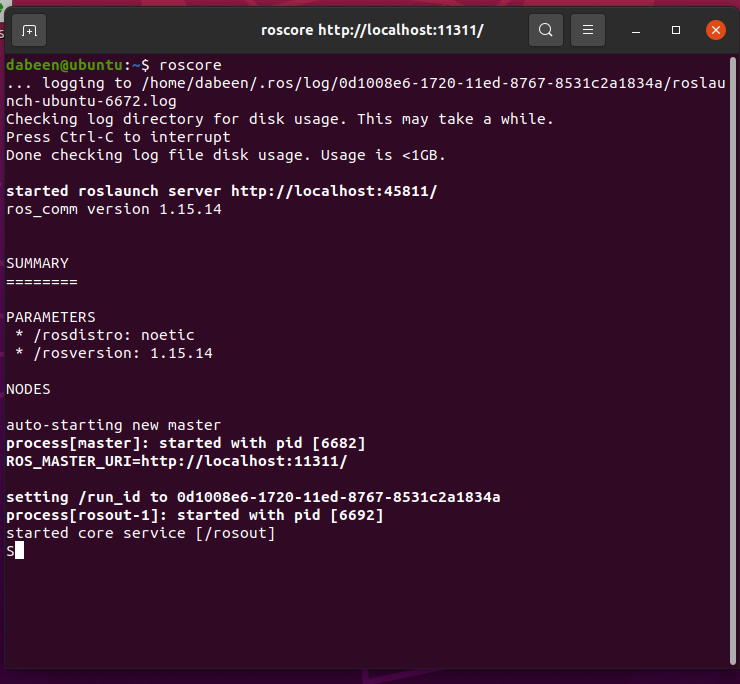
현재 상태 : VMware를 사용하여 Ubuntu 20.04 설치되어있음firefox에 "ros noetic install"을 설치하여 나오는 제일 첫 페이지를 통하여 ros noetic 설치Ros 설치 완료참고 영상https://www.youtube.com/
4.[자율주행] VScode로 ROS 실행
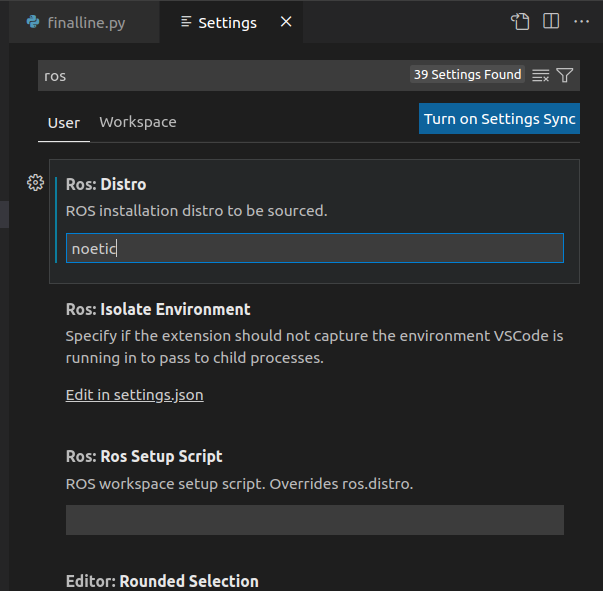
VScode에서 ctrl+,를 눌러 setting 할 수 있는 항목들의 검색창을 띄움ROS를 검색하여 자신에게 맞는 distro 적어줌(나는 Ubuntu 20.04이므로 noetic)(mavros : ROS(1)과 MAVLink 프로토콜 간의 공식 지원 브리지.모든 M
5.[자율주행] ROS 공부
참고 자료 https://www.youtube.com/watch?v=5RBqGt1hvpM&list=PLRG6WP3c31VIFtFAxSke2NGDumVZPgw&index=5 ROS 용어 정리 master 노드와 노드 사이의 연결과 메시지 통신을 위한 네임버서와 같은
6.[자율주행] Ubuntu 개발환경 세팅
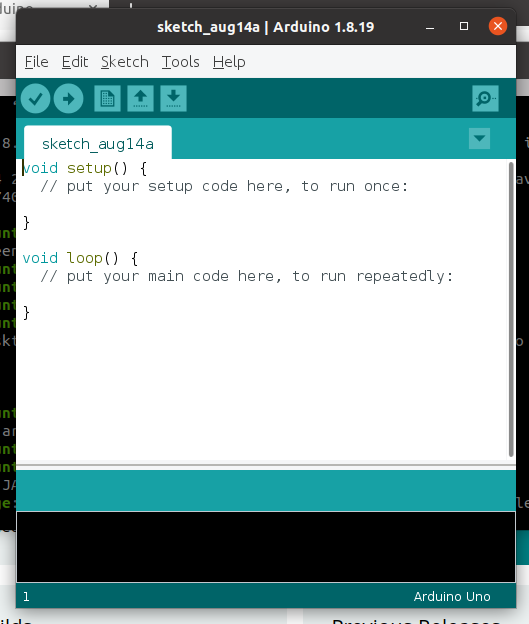
www.arduino.cc/en/software아두이노 다운로드 페이지에 방문하여 최신 버전을 확인한다.2022.08.15 기준 최신버전은 Arduino IDE 1.8.19wget 명령어를 이용해 다운로드를 해주자wget은 터미널의 현재 위치에 파일을 다운로드 하기 때