Outline
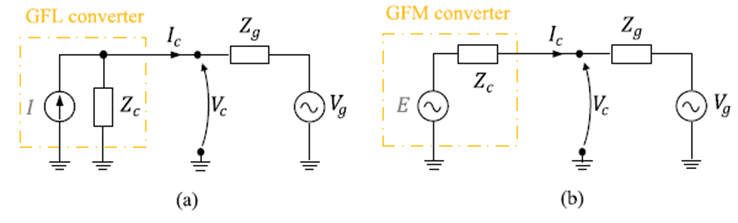
- GFM(Grid Forimg) Converter
- 인버터 출력 전압을 제어하여 전력을 조절
- 토폴로지의 차이가 있으나 기본적으로 위상정보 필요 X
- 작은 직렬 임피던스를 가진 전압원 동작
- 무부하 조건에서 부하 및 근처 다른 장치의 기준 전압을 제공
- GFL(Grid Following) Converter
- 상위제어기의 유/무효전력 지령을 통해 출력하는 전류제어
- 높은 병렬 임피던스를 가진 전류원 동작
- 전류 주입을 위한 계통(Grid)의 위상정보 필요
GFM / GFL 비교 [0]
- 다른 동작원리지만 정상상태에서 유/무효전력 주입, 컨버터의 전압, 전류 제한 등 제어함
- 추가 외부 루프로 PCC단 전압/주파수 조건과 계통 코드에 요구되는 실제 유/무효전력 설정이 가능함
- 두가지가 비슷해 보이나 Notion or Thevenin 등가회로로 상호교환 X
- 계통에 같은 상황이 발생하였을 경우 다르게 동작함
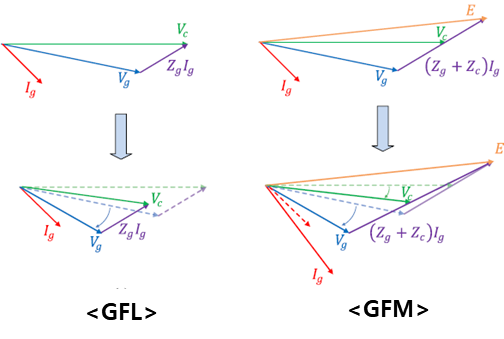
GFL
- 의 크기 및 위상을 일정하게 유지 컨버터 전압() 위상이 변함
: 새로운 전류 설정 값 계산을 위해 새로운 의 위상각 검출이 필요 - 계통의 전압 각도, 컨버터 전류의 위상 이동을 계산하기 위한 전용 장치 필요
: 유/무효전력 공급을 위해
GFM
- 의 즉각적인인 변화로 인해 컨버터의 내부 전압 위상()은 거의 변화가 없음
- 컨버터 전류의 빠른 증가로 하드웨어 구성 요소가 위태로울 수 있음
- 동기기의 전력동기화 원리 모방을 통해 계통에 동기화 가능
A. Grid Forming Converter
- 계통의 환경변화로 인해 그리드 포밍(GFM)기술이 대두됨
(동기발전기 인버터 기반 발전원, Micro & 독립 계통에 적용) - 가상동기기 모델 제어, 동기발전기 등가회로 기반 모델 제어, Droop 제어 등
- 대부분 동기기 기반 방법을 사용하나 위상각에 의한 안정성 문제가 발생할 수 있음
- 전압원 동작으로 인해 GFM 컨버터의 전류가 계통의 상황에 의해 결정되어 빠르게 변할 가능성이 있음
Fault Ride-Through 전략이 필요함 - 계통연계와 독립운전 간 Hot-Swap 이슈가 있음
B. GFM Converter Algorithms
1. Outer Loop - 동기화
1) Droop Control
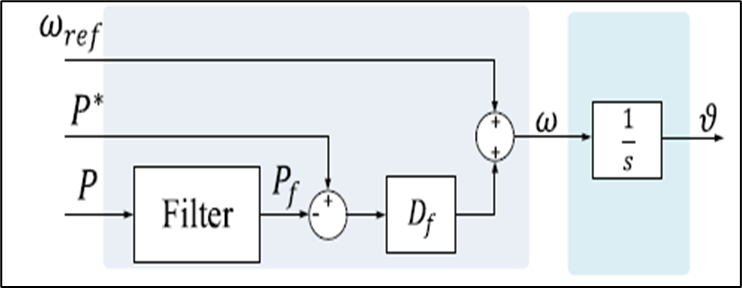
- 는 Droop 계수, 설정 전력()과 측정된 순간 전력() 차이에 따른 컨버터 주파수 변화를 나타냄
- 위 식으로 부터 를 얻을 수 있음
- 간단한 구조, 정상 운전시 동기화 목적의 추가 장치 필요 X
2) PSC(Power Synchronization control)
- 동기기의 메커니즘을 모방하여 과도 전력 전달로 동기화 달성
- Weak 계통에서 기존 벡터 제어 VSC(Voltage Source Converter)의 한계를 대응하기 위해 개발됨
- 는 제어변수, 를 적분하여 를 얻음
- 동기화 장치가 필요 X, 사전 동기화 및 계통 Fault 시 백업 PLL 사용
※ 백업 PLL; 정상상태에서 필요 X, 과전류 제한을 위해 사용 [10]
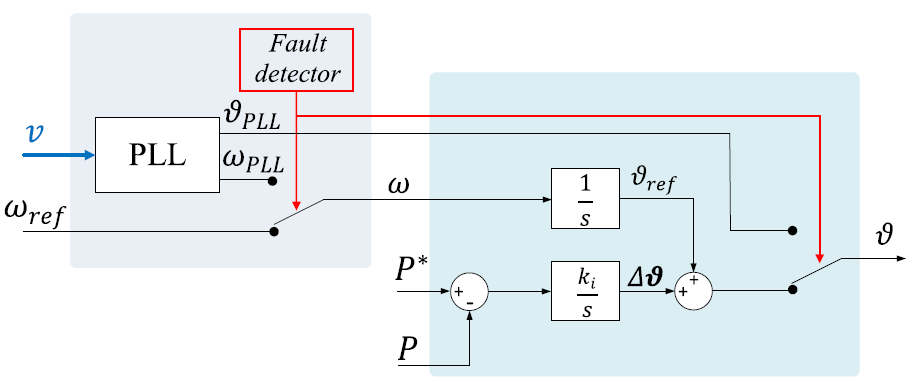
3) EDPC(Enhanced Direct Power Control)
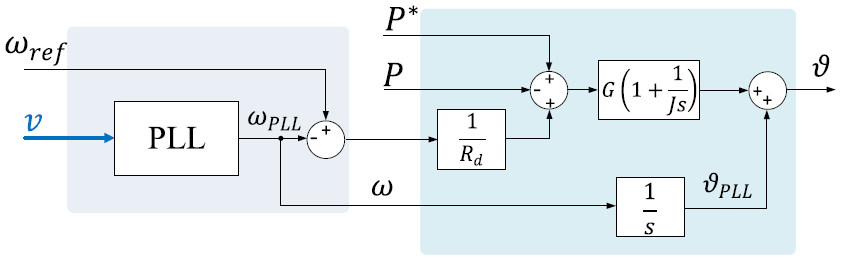
- PSC와 비슷한 구조
- 계통 Fualt 시 자기동기화에서 PLL모드로 전환을 방지하기 위해 정상 동작에서 PLL 사용을 예상함
- 출력 주파수는 PLL에 의해 제공되나 계산은 수식을 따름
- PI 제어기 이득 와 시간 상수 로 구현, 는 주파수 Droop 계수의 역수
- 시간상수 는 주파수 변화에 따른 컨버터 응답을 형성하기 위한 추가적인 자유도 역할을 하며 동기기와 유사한 동작 제공 [11]
- 가상 동기기의 동기화 루프는 단순성을 위해 실제 동기기 스윙방정식을 모방하여 제공 [30]
- 관성 모멘트 , 로터속도 , 기계적 마찰 , 전기적 토크 , 기계적 토크
4) Synchronverter
- 가상 동기기로서 알려짐 [13], [14]
- 정상상태와 사전동기화를 동시에 가능하게 함
- 실제 동기기를 모방한 프로세스를 사용하지만 표준 PLL과 비슷함 [31]
- 자유도 보상을 위해 원래 Synchronverter 제어구조를 수정해서 제안됨
: 정상상태 Droop 동작을 유지하며, 제어의 동적 응답을 개선 [32]
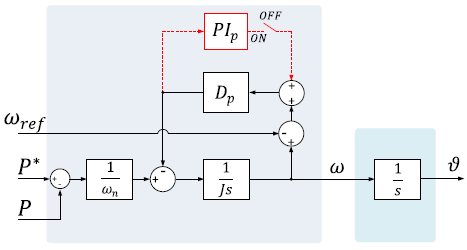
- PI 제어기를 통해 컨버터의 Droop 제어 동작을 on/off 함
5) SPC(Synchronous Power Control)
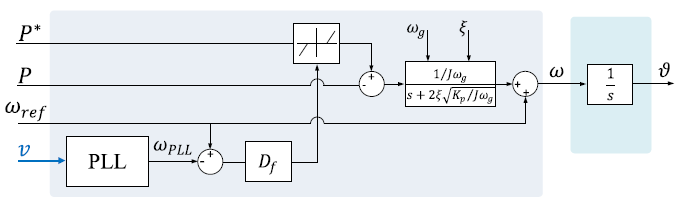
-
내부 주파수 루프에 2차 전달함수 구현, 에 작용
-
추가 주파수 Droop 루프가 구현되어 계통 주파수 와 사이의 편차에 따라 유효전력을 조절함
: 는 추정 예시; PLL 등
-
가상 관성 , 댐핑 계수 , 는 컨버터의 와 사이의 전달함수의 정상상태 값
6) 구조 분석
-
로 가정하면 아래 방정식은 Droop 제어와 PSC 제어 모두에서 유효함
-
가상 동기기의 관성을 으로 했을 경우 Droop 제어 구조와 같음 [17]-[19]
: (측정된 컨버터 전력 는 1cycle 의 Boxcar Filter로 처리) -
측정된 컨버터 전력을 필터링하여 Droop제어기로 가상 동기기와 동일한 관성 응답 달성 가능 [9]
-
Synchronverter와 SPC의 가상 동기기 구조의 동등성은 [33]에서 입증
-
???Synchronverter에 대해 산출하는 전력 차이 는 3)에서의 수식을 미분하여 다음 수식을 얻음
-
SPC에 수식에도 같은 계산을 적용 시,,
-
결과적으로 가상동기기 구현의 제어 파라미터를 다음과 같이 설정하면 수식은 동일함
2. Outer Loop - 전압 크기 양상
출처 및 참조
- [0]의 문헌을 기준으로 작성되었으며, 혼동을 방지하기 위해 참조 번호를 똑같이 매김
- Reference
[0] R. Rosso, X. Wang, M. Liserre, X. Lu and S. Engelken, "Grid-Forming Converters: Control Approaches, Grid-Synchronization, and Future Trends—A Review," in IEEE Open Journal of Industry Applications, vol. 2, pp. 93-109, 2021
[10] L. Zhang, L. Harnefors and H. Nee, "Power-Synchronization Control of Grid-Connected Voltage-Source Converters," in IEEE Transactions on Power Systems, vol. 25, no. 2, pp. 809-820, May 2010
Revision. 22. 08. 05.

PCS 전류, 전압제어기 설계, 전기설계